显著性目标检测之Label Decoupling Framework for Salient Object Detection
文章目录
- 摘要
- 网络详解
- Label Decoupling
- 特征提取
- Feature Interaction Network
- 损失函数
- 实验结果
- 实验细节
- 消融实验
- 对比其他方法
- 总结
摘要
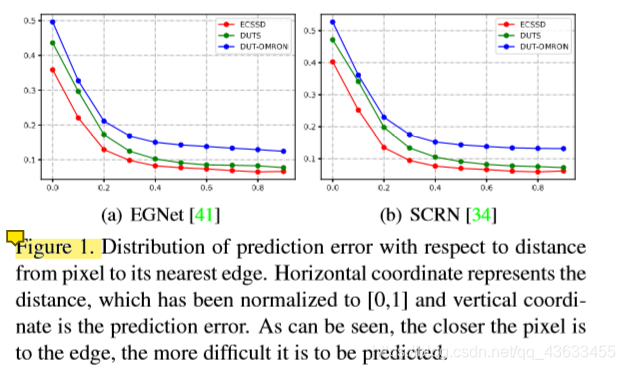
现存问题:下图为两个目前比较好检测方法的预测误差随像素到其最近边缘的距离的分布。横坐标表示距离,已归一化为[0,1],纵坐标为预测误差。可以看出,像素越靠近边缘,越难预测。传统的显著性标签对显著性目标内部的像素都是同等对待的,这可能会导致预测误差较小的像素受到边缘的干扰;
提出方法:Label Decoupling Framework,该网络主要包含以下两部分:
- 标签解耦(LD):通过LD过程,特征图像被分离为两部分:主体和边缘细节。细节图由边缘和附近的像素组成,充分利用了近边缘的像素,使像素分布更加均衡。主题映射主要集中在远离边缘的像素上。
- 特征交互网络(FIN):FIN有两个分支,分别适用于主体图和细节图。将两个互补的分支融合在一起预测显著性映射,然后利用显著性映射对两个分支进行再次细化。这种迭代精化过程有助于获得逐渐精确的显著性图预测,促进分支之间的迭代信息交换。
网络详解
在这一部分要详细讲述网络的组成以及每部分的构造原理
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!