Label Decoupling Framework for Salient Object Detection 论文解读
该论文发表于CVPR2020。
论文链接:https://openaccess.thecvf.com/content_CVPR_2020/papers/Wei_Label_Decoupling_Framework_for_Salient_Object_Detection_CVPR_2020_paper.pdf
项目地址:
https://github.com/weijun88/LDF
文章目录
- 待解决的问题
- 提出方法
- 标签解耦
- 特征提取
- Feature Interaction Network
- 损失函数
- 实验结果
- 关于Feature Interaction的迭代次数实验部分
- 关于损失函数的实验部分
- 与现有方法的定量对比结果
- 与现有方法的可视化结果对比
- 在SOC数据集(拥有各式各样的属性)上的表现
- 文章总结
- 个人评价
待解决的问题
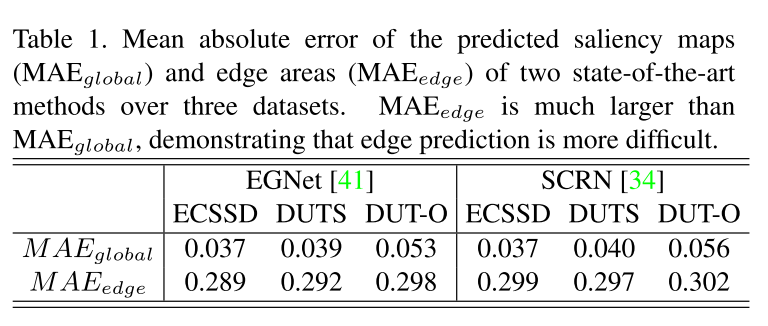
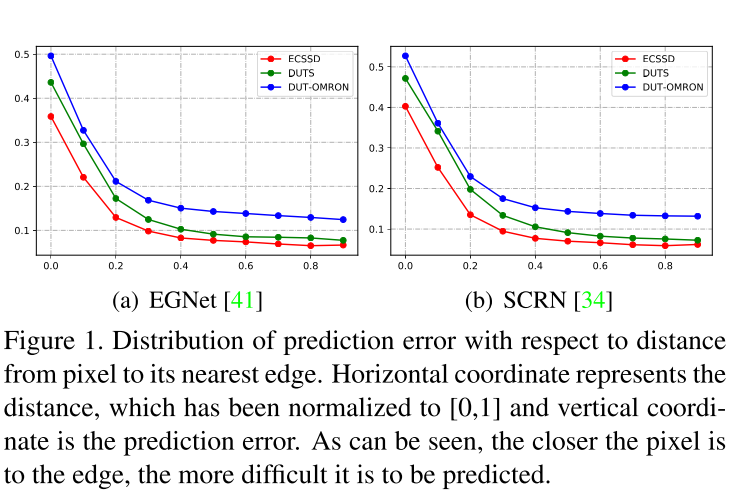
现有方法存在的问题介绍:表格1展示了两种方法EGNet和SCRN在三个数据集上的测试结果。我们可以发现,相比较预测整体而言,在边缘处的预测会更加困难(MAEedge的值均比MAEglobal的值要高)。图1中横坐标表示像素点到其最近点边缘处的距离,该距离已经正则化至0到1,纵坐标表示预测误差。我们可以发现,当像素点越靠近边缘时,该预测误差值越大,即越靠近边缘的地方越难预测。
其主要原因是:存在一个边缘像素和背景像素分布不均衡的问题。即距离边缘越远的像素更容易被分类为背景像素,越近的像素很难对其进行分类。在传统的SOD方法中,将显著性目标中所有的像素都是同等对待,这就可能会使得预测结果受到靠近边缘处像素的影响。
提出方法
为了解决上述问题,本文利用解耦的思想,提出了一种标签解耦的显著性目标检测方法。该方法克服了以往基于边缘的SOD方法,分别预测body map和detail map。该方法设计了一个feature interaction网络来充分利用两分支的信息,通过迭代的方式得到更加精确的预测结果。本文的方法在6个SOD数据集上取得了较好的实验结果。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!