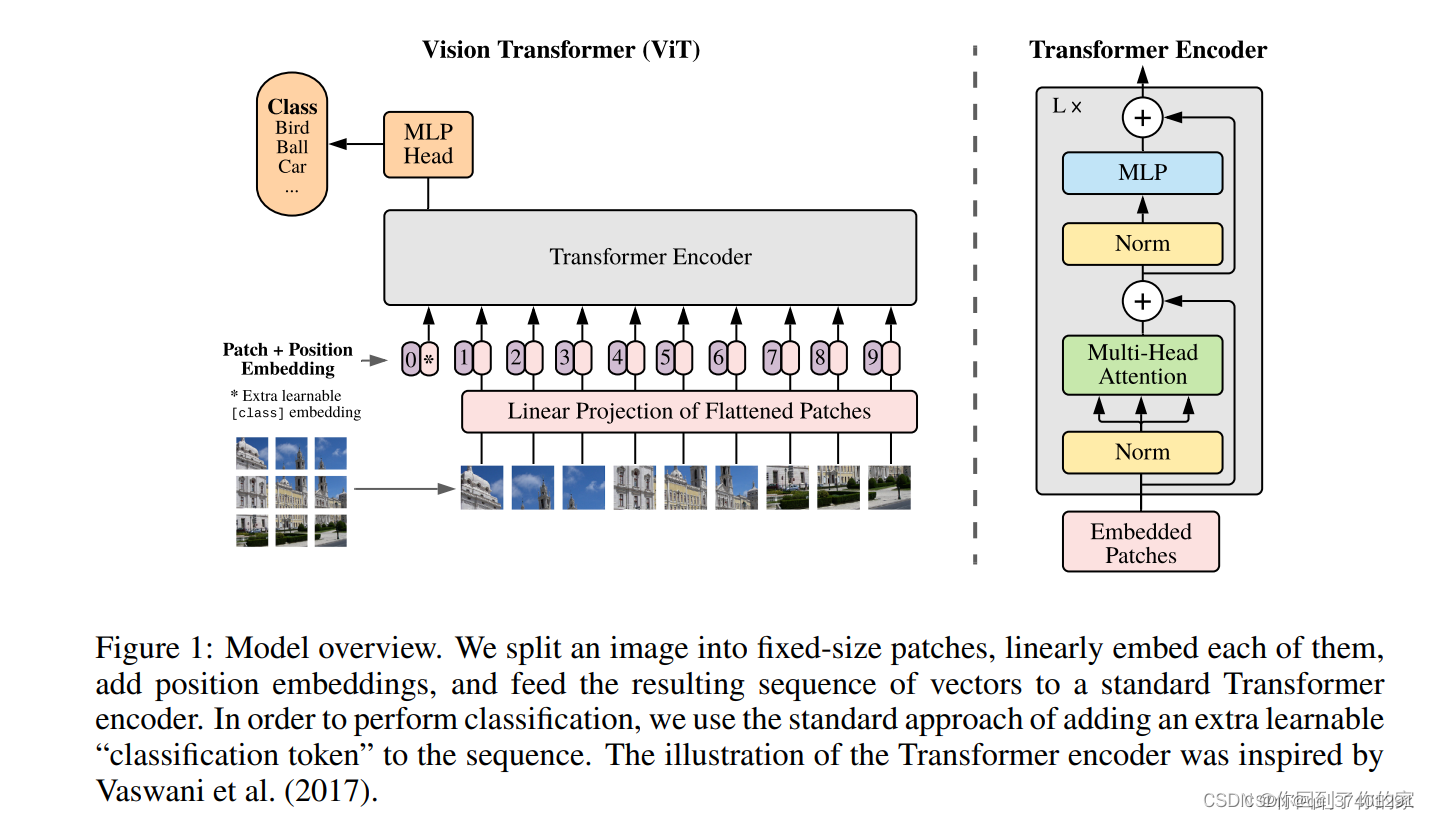
猫狗分类下引用原生vit对比rensnet50
VIT(Visual Transformer)原生对比rensnet50在猫狗分类中acc提升明显(3090显卡训练)
!pip -q install vit_pytorch linformer
导入环境包
from __future__ import print_functionimport glob
from itertools import chain
import os
import random
import zipfileimport matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from linformer import Linformer
from PIL import Image
from sklearn.model_selection import train_test_split
from torch.optim.lr_scheduler import StepLR
from torch.utils.data import DataLoader, Dataset
from torchvision import datasets, transforms
from tqdm.notebook import tqdm#from vit_pytorch.efficient import ViT
from vit_pytorch import ViT
print(f"Torch: {torch.__version__}")
device = torch.device('cuda:0') # 显卡序号信息
GPU_device = torch.cuda.get_device_properties(device) # 显卡信息
print(f"VIT vs rensnet50 torch {torch.__version__} device {device} ({GPU_device.name}, {GPU_device.total_memory / 1024 ** 2}MB)\n")Torch: 1.12.1+cu116
VIT vs rensnet50 torch 1.12.1+cu116 device cuda:0 (NVIDIA GeForce RTX 3090, 24575.5MB)
# Training settings
batch_size = 64
epochs = 20
lr = 3e-5
gamma = 0.7
seed = 42
def seed_everything(seed):random.seed(seed)os.environ['PYTHONHASHSEED'] = str(seed)np.random.seed(seed)torch.manual_seed(seed)torch.cuda.manual_seed(seed)torch.cuda.manual_seed_all(seed)torch.backends.cudnn.deterministic = Trueseed_everything(seed)
device = 'cuda'
读取数据(下载地址)
下载地址:
https://download.csdn.net/download/qq_37401291/87391094
百度下载
链接:https://pan.baidu.com/s/1r_Z1B9pw_cKZJU-hjfDaSA
提取码:p7s9
–来自百度网盘超级会员V6的分享
os.makedirs('data', exist_ok=True)
train_dir = 'data/train'
test_dir = 'data/test'
# with zipfile.ZipFile('data/train.zip') as train_zip:
# train_zip.extractall('data')# with zipfile.ZipFile('data/test.zip') as test_zip:
# test_zip.extractall('data')
train_list = glob.glob(os.path.join(train_dir, '*.jpg'))
test_list = glob.glob(os.path.join(test_dir, '*.jpg'))
print(f"Train Data: {len(train_list)}")
print(f"Test Data: {len(test_list)}")
Train Data: 25000
Test Data: 12500
labels = [path.split('/')[-1].split('\\')[-1].split('.')[0] for path in train_list]
#print(labels)
print(train_list[0])
print(labels[0])
data/train\cat.0.jpg
cat
随机 Plots
random_idx = np.random.randint(1, len(train_list), size=9)
fig, axes = plt.subplots(3, 3, figsize=(16, 12))for idx, ax in enumerate(axes.ravel()):img = Image.open(train_list[idx])ax.set_title(labels[idx])ax.imshow(img)
划分数据集
train_list, valid_list = train_test_split(train_list,test_size=0.2,stratify=labels,random_state=seed)
print(f"Train Data: {len(train_list)}")
print(f"Validation Data: {len(valid_list)}")
print(f"Test Data: {len(test_list)}")
Train Data: 20000
Validation Data: 5000
Test Data: 12500
图片数据增强
train_transforms = transforms.Compose([transforms.Resize((224, 224)),transforms.RandomResizedCrop(224),transforms.RandomHorizontalFlip(),transforms.ToTensor(),]
)val_transforms = transforms.Compose([transforms.Resize((224, 224)),transforms.RandomResizedCrop(224),transforms.RandomHorizontalFlip(),transforms.ToTensor(),]
)test_transforms = transforms.Compose([transforms.Resize((224, 224)),transforms.RandomResizedCrop(224),transforms.RandomHorizontalFlip(),transforms.ToTensor(),]
)读取数据集
class CatsDogsDataset(Dataset):def __init__(self, file_list, transform=None):self.file_list = file_listself.transform = transformdef __len__(self):self.filelength = len(self.file_list)return self.filelengthdef __getitem__(self, idx):img_path = self.file_list[idx]img = Image.open(img_path)img_transformed = self.transform(img)label = img_path.split("/")[-1].split('\\')[-1].split(".")[0]label = 1 if label == "dog" else 0return img_transformed, labeltrain_data = CatsDogsDataset(train_list, transform=train_transforms)
valid_data = CatsDogsDataset(valid_list, transform=test_transforms)
test_data = CatsDogsDataset(test_list, transform=test_transforms)
train_loader = DataLoader(dataset=train_data, batch_size=batch_size, shuffle=True)
valid_loader = DataLoader(dataset=valid_data, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(dataset=test_data, batch_size=batch_size, shuffle=True)
print(len(train_data), len(train_loader))
20000 313
print(len(valid_data), len(valid_loader))
5000 79
Visual Transformer
# vit_large = ViT(
# image_size = 224,
# patch_size = 16,
# num_classes = 2,
# dim = 768,
# depth = 12,
# heads =12,
# mlp_dim = 3072,
# dropout = 0.1,
# emb_dropout = 0.1
# ).to(device)# vit_huge = ViT(
# image_size = 224,
# patch_size = 16,
# num_classes = 2,
# dim = 768,
# depth = 12,
# heads =12,
# mlp_dim = 3072,
# dropout = 0.1,
# emb_dropout = 0.1
# ).to(device)model = ViT(image_size=224,patch_size=32,num_classes=2,dim=1024,depth=24,heads=16,mlp_dim=4096,dropout=0.1,emb_dropout=0.1
).to(device)#model.load_state_dict(torch.load('vit_base_patch16_224_r.pth'), strict=False)
ResNet 需要可以自己对比训练普遍acc 0.74-0.76
# import torchvision
#
# model = torchvision.models.resnet50(pretrained=False).to(device)
# model.fc = nn.Sequential(
# nn.Linear(2048, 2)
# ).to(device)
E:\Miniconda3\envs\paper\lib\site-packages\torchvision\models\_utils.py:208: UserWarning: The parameter 'pretrained' is deprecated since 0.13 and will be removed in 0.15, please use 'weights' instead.warnings.warn(
E:\Miniconda3\envs\paper\lib\site-packages\torchvision\models\_utils.py:223: UserWarning: Arguments other than a weight enum or `None` for 'weights' are deprecated since 0.13 and will be removed in 0.15. The current behavior is equivalent to passing `weights=None`.warnings.warn(msg)
Training
# # loss function
# criterion = nn.CrossEntropyLoss()
# # optimizer
# optimizer = optim.Adam(model.parameters(), lr=lr)
# # scheduler
# scheduler = StepLR(optimizer, step_size=1, gamma=gamma)
# for epoch in range(epochs):
# epoch_loss = 0
# epoch_accuracy = 0
#
# for data, label in tqdm(train_loader):
# data = data.to(device)
# label = label.to(device)
#
# output = model(data)
# loss = criterion(output, label)
#
# optimizer.zero_grad()
# loss.backward()
# optimizer.step()
#
# acc = (output.argmax(dim=1) == label).float().mean()
# epoch_accuracy += acc / len(train_loader)
# epoch_loss += loss / len(train_loader)
#
# with torch.no_grad():
# epoch_val_accuracy = 0
# epoch_val_loss = 0
# for data, label in valid_loader:
# data = data.to(device)
# label = label.to(device)
#
# val_output = model(data)
# val_loss = criterion(val_output, label)
#
# acc = (val_output.argmax(dim=1) == label).float().mean()
# epoch_val_accuracy += acc / len(valid_loader)
# epoch_val_loss += val_loss / len(valid_loader)
#
# print(
# f"Epoch : {epoch + 1} - loss : {epoch_loss:.4f} - acc: {epoch_accuracy:.4f} - val_loss : {epoch_val_loss:.4f} - val_acc: {epoch_val_accuracy:.4f}\n"
# )太多了只保留最后的
0%| | 0/313 [00:00swin trans
# --------------------------------------------------------
# Swin Transformer
# Copyright (c) 2021 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ze Liu
# --------------------------------------------------------import torch
import torch.nn as nn
import torch.utils.checkpoint as checkpoint
from timm.models.layers import DropPath, to_2tuple, trunc_normal_
import logging
import math
from copy import deepcopy
from typing import Optionalimport torch
import torch.nn as nn
import torch.utils.checkpoint as checkpoint
# 注意版本
# !pip install timm==0.5.4
from timm.data import IMAGENET_DEFAULT_MEAN, IMAGENET_DEFAULT_STD
from timm.models.helpers import build_model_with_cfg, overlay_external_default_cfg
from timm.models.layers import PatchEmbed, Mlp, DropPath, to_2tuple, trunc_normal_
from timm.models.registry import register_model
from timm.models.vision_transformer import checkpoint_filter_fn, _init_vit_weightsdef _cfg(url='', **kwargs):return {'url': url,'num_classes': 1000, 'input_size': (3, 224, 224), 'pool_size': None,'crop_pct': .9, 'interpolation': 'bicubic', 'fixed_input_size': True,'mean': IMAGENET_DEFAULT_MEAN, 'std': IMAGENET_DEFAULT_STD,'first_conv': 'patch_embed.proj', 'classifier': 'head',**kwargs}default_cfgs = {# patch models (my experiments)'swin_base_patch4_window12_384': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window12_384_22kto1k.pth',input_size=(3, 384, 384), crop_pct=1.0),'swin_base_patch4_window7_224': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window7_224_22kto1k.pth',),'swin_large_patch4_window12_384': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22kto1k.pth',input_size=(3, 384, 384), crop_pct=1.0),'swin_large_patch4_window7_224': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window7_224_22kto1k.pth',),'swin_small_patch4_window7_224': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_small_patch4_window7_224.pth',),'swin_tiny_patch4_window7_224': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_tiny_patch4_window7_224.pth',),'swin_base_patch4_window12_384_in22k': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window12_384_22k.pth',input_size=(3, 384, 384), crop_pct=1.0, num_classes=21841),'swin_base_patch4_window7_224_in22k': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_base_patch4_window7_224_22k.pth',num_classes=21841),'swin_large_patch4_window12_384_in22k': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window12_384_22k.pth',input_size=(3, 384, 384), crop_pct=1.0, num_classes=21841),'swin_large_patch4_window7_224_in22k': _cfg(url='https://github.com/SwinTransformer/storage/releases/download/v1.0.0/swin_large_patch4_window7_224_22k.pth',num_classes=21841),}class Mlp(nn.Module):def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Linear(in_features, hidden_features)self.act = act_layer()self.fc2 = nn.Linear(hidden_features, out_features)self.drop = nn.Dropout(drop)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return xdef window_partition(x, window_size):"""Args:x: (B, H, W, C)window_size (int): window sizeReturns:windows: (num_windows*B, window_size, window_size, C)"""B, H, W, C = x.shapex = x.view(B, H // window_size, window_size, W // window_size, window_size, C)windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)return windowsdef window_reverse(windows, window_size, H, W):"""Args:windows: (num_windows*B, window_size, window_size, C)window_size (int): Window sizeH (int): Height of imageW (int): Width of imageReturns:x: (B, H, W, C)"""B = int(windows.shape[0] / (H * W / window_size / window_size))x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)return xclass WindowAttention(nn.Module):r""" Window based multi-head self attention (W-MSA) module with relative position bias.It supports both of shifted and non-shifted window.Args:dim (int): Number of input channels.window_size (tuple[int]): The height and width of the window.num_heads (int): Number of attention heads.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if setattn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0proj_drop (float, optional): Dropout ratio of output. Default: 0.0"""def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dimself.window_size = window_size # Wh, Wwself.num_heads = num_headshead_dim = dim // num_headsself.scale = qk_scale or head_dim ** -0.5# define a parameter table of relative position biasself.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH# get pair-wise relative position index for each token inside the windowcoords_h = torch.arange(self.window_size[0])coords_w = torch.arange(self.window_size[1])coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Wwcoords_flatten = torch.flatten(coords, 1) # 2, Wh*Wwrelative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Wwrelative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0relative_coords[:, :, 1] += self.window_size[1] - 1relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Wwself.register_buffer("relative_position_index", relative_position_index)self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)trunc_normal_(self.relative_position_bias_table, std=.02)self.softmax = nn.Softmax(dim=-1)def forward(self, x, mask=None):"""Args:x: input features with shape of (num_windows*B, N, C)mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None"""B_, N, C = x.shape#print(x.shape)qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)q = q * self.scaleattn = (q @ k.transpose(-2, -1))relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nHrelative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Wwattn = attn + relative_position_bias.unsqueeze(0)if mask is not None:nW = mask.shape[0]attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)attn = attn.view(-1, self.num_heads, N, N)attn = self.softmax(attn)else:attn = self.softmax(attn)attn = self.attn_drop(attn)x = (attn @ v).transpose(1, 2).reshape(B_, N, C)x = self.proj(x)x = self.proj_drop(x)return xdef extra_repr(self) -> str:return f'dim={self.dim}, window_size={self.window_size}, num_heads={self.num_heads}'def flops(self, N):# calculate flops for 1 window with token length of Nflops = 0# qkv = self.qkv(x)flops += N * self.dim * 3 * self.dim# attn = (q @ k.transpose(-2, -1))flops += self.num_heads * N * (self.dim // self.num_heads) * N# x = (attn @ v)flops += self.num_heads * N * N * (self.dim // self.num_heads)# x = self.proj(x)flops += N * self.dim * self.dimreturn flopsclass SwinTransformerBlock(nn.Module):r""" Swin Transformer Block.Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resulotion.num_heads (int): Number of attention heads.window_size (int): Window size.shift_size (int): Shift size for SW-MSA.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float, optional): Stochastic depth rate. Default: 0.0act_layer (nn.Module, optional): Activation layer. Default: nn.GELUnorm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, dim, input_resolution, num_heads, window_size=7, shift_size=0,mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,act_layer=nn.GELU, norm_layer=nn.LayerNorm):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.num_heads = num_headsself.window_size = window_sizeself.shift_size = shift_sizeself.mlp_ratio = mlp_ratioif min(self.input_resolution) <= self.window_size:# if window size is larger than input resolution, we don't partition windowsself.shift_size = 0self.window_size = min(self.input_resolution)assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"self.norm1 = norm_layer(dim)self.attn = WindowAttention(dim, window_size=to_2tuple(self.window_size), num_heads=num_heads,qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)if self.shift_size > 0:# calculate attention mask for SW-MSAH, W = self.input_resolutionimg_mask = torch.zeros((1, H, W, 1)) # 1 H W 1h_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))w_slices = (slice(0, -self.window_size),slice(-self.window_size, -self.shift_size),slice(-self.shift_size, None))cnt = 0for h in h_slices:for w in w_slices:img_mask[:, h, w, :] = cntcnt += 1mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1mask_windows = mask_windows.view(-1, self.window_size * self.window_size)#print(mask_windows.shape)attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))else:attn_mask = Noneself.register_buffer("attn_mask", attn_mask)def forward(self, x):H, W = self.input_resolutionB, L, C = x.shapeassert L == H * W, "input feature has wrong size"shortcut = xx = self.norm1(x)x = x.view(B, H, W, C)# cyclic shiftif self.shift_size > 0:shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))else:shifted_x = x# partition windowsx_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, Cx_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C# W-MSA/SW-MSAattn_windows = self.attn(x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C# merge windowsattn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C# reverse cyclic shiftif self.shift_size > 0:x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))else:x = shifted_xx = x.view(B, H * W, C)# FFNx = shortcut + self.drop_path(x)x = x + self.drop_path(self.mlp(self.norm2(x)))return xdef extra_repr(self) -> str:return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, "f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"def flops(self):flops = 0H, W = self.input_resolution# norm1flops += self.dim * H * W# W-MSA/SW-MSAnW = H * W / self.window_size / self.window_sizeflops += nW * self.attn.flops(self.window_size * self.window_size)# mlpflops += 2 * H * W * self.dim * self.dim * self.mlp_ratio# norm2flops += self.dim * H * Wreturn flopsclass PatchMerging(nn.Module):r""" Patch Merging Layer.Args:input_resolution (tuple[int]): Resolution of input feature.dim (int): Number of input channels.norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm"""def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):super().__init__()self.input_resolution = input_resolutionself.dim = dimself.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)self.norm = norm_layer(4 * dim)def forward(self, x):"""x: B, H*W, C"""H, W = self.input_resolutionB, L, C = x.shapeassert L == H * W, "input feature has wrong size"assert H % 2 == 0 and W % 2 == 0, f"x size ({H}*{W}) are not even."x = x.view(B, H, W, C)x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 Cx1 = x[:, 1::2, 0::2, :] # B H/2 W/2 Cx2 = x[:, 0::2, 1::2, :] # B H/2 W/2 Cx3 = x[:, 1::2, 1::2, :] # B H/2 W/2 Cx = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*Cx = x.view(B, -1, 4 * C) # B H/2*W/2 4*Cx = self.norm(x)x = self.reduction(x)return xdef extra_repr(self) -> str:return f"input_resolution={self.input_resolution}, dim={self.dim}"def flops(self):H, W = self.input_resolutionflops = H * W * self.dimflops += (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dimreturn flopsclass BasicLayer(nn.Module):""" A basic Swin Transformer layer for one stage.Args:dim (int): Number of input channels.input_resolution (tuple[int]): Input resolution.depth (int): Number of blocks.num_heads (int): Number of attention heads.window_size (int): Local window size.mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False."""def __init__(self, dim, input_resolution, depth, num_heads, window_size,mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0.,drop_path=0., norm_layer=nn.LayerNorm, downsample=None, use_checkpoint=False):super().__init__()self.dim = dimself.input_resolution = input_resolutionself.depth = depthself.use_checkpoint = use_checkpoint# build blocksself.blocks = nn.ModuleList([SwinTransformerBlock(dim=dim, input_resolution=input_resolution,num_heads=num_heads, window_size=window_size,shift_size=0 if (i % 2 == 0) else window_size // 2,mlp_ratio=mlp_ratio,qkv_bias=qkv_bias, qk_scale=qk_scale,drop=drop, attn_drop=attn_drop,drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,norm_layer=norm_layer)for i in range(depth)])# patch merging layerif downsample is not None:self.downsample = downsample(input_resolution, dim=dim, norm_layer=norm_layer)else:self.downsample = Nonedef forward(self, x):for blk in self.blocks:if self.use_checkpoint:x = checkpoint.checkpoint(blk, x)else:x = blk(x)if self.downsample is not None:x = self.downsample(x)return xdef extra_repr(self) -> str:return f"dim={self.dim}, input_resolution={self.input_resolution}, depth={self.depth}"def flops(self):flops = 0for blk in self.blocks:flops += blk.flops()if self.downsample is not None:flops += self.downsample.flops()return flopsclass PatchEmbed(nn.Module):r""" Image to Patch EmbeddingArgs:img_size (int): Image size. Default: 224.patch_size (int): Patch token size. Default: 4.in_chans (int): Number of input image channels. Default: 3.embed_dim (int): Number of linear projection output channels. Default: 96.norm_layer (nn.Module, optional): Normalization layer. Default: None"""def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):super().__init__()img_size = to_2tuple(img_size)patch_size = to_2tuple(patch_size)patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]self.img_size = img_sizeself.patch_size = patch_sizeself.patches_resolution = patches_resolutionself.num_patches = patches_resolution[0] * patches_resolution[1]self.in_chans = in_chansself.embed_dim = embed_dimself.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)if norm_layer is not None:self.norm = norm_layer(embed_dim)else:self.norm = Nonedef forward(self, x):B, C, H, W = x.shape# FIXME look at relaxing size constraintsassert H == self.img_size[0] and W == self.img_size[1], f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw Cif self.norm is not None:x = self.norm(x)return xdef flops(self):Ho, Wo = self.patches_resolutionflops = Ho * Wo * self.embed_dim * self.in_chans * (self.patch_size[0] * self.patch_size[1])if self.norm is not None:flops += Ho * Wo * self.embed_dimreturn flopsclass SwinTransformer(nn.Module):r""" Swin TransformerA PyTorch impl of : `Swin Transformer: Hierarchical Vision Transformer using Shifted Windows` -https://arxiv.org/pdf/2103.14030Args:img_size (int | tuple(int)): Input image size. Default 224patch_size (int | tuple(int)): Patch size. Default: 4in_chans (int): Number of input image channels. Default: 3num_classes (int): Number of classes for classification head. Default: 1000embed_dim (int): Patch embedding dimension. Default: 96depths (tuple(int)): Depth of each Swin Transformer layer.num_heads (tuple(int)): Number of attention heads in different layers.window_size (int): Window size. Default: 7mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4qkv_bias (bool): If True, add a learnable bias to query, key, value. Default: Trueqk_scale (float): Override default qk scale of head_dim ** -0.5 if set. Default: Nonedrop_rate (float): Dropout rate. Default: 0attn_drop_rate (float): Attention dropout rate. Default: 0drop_path_rate (float): Stochastic depth rate. Default: 0.1norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.ape (bool): If True, add absolute position embedding to the patch embedding. Default: Falsepatch_norm (bool): If True, add normalization after patch embedding. Default: Trueuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False"""def __init__(self, img_size=224, patch_size=4, in_chans=3, num_classes=1000,embed_dim=96, depths=[2, 2, 6, 2], num_heads=[3, 6, 12, 24],window_size=7, mlp_ratio=4., qkv_bias=True, qk_scale=None,drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1,norm_layer=nn.LayerNorm, ape=False, patch_norm=True,use_checkpoint=False, **kwargs):super().__init__()self.num_classes = num_classesself.num_layers = len(depths)self.embed_dim = embed_dimself.ape = apeself.patch_norm = patch_normself.num_features = int(embed_dim * 2 ** (self.num_layers - 1))self.mlp_ratio = mlp_ratio# split image into non-overlapping patchesself.patch_embed = PatchEmbed(img_size=img_size, patch_size=patch_size, in_chans=in_chans, embed_dim=embed_dim,norm_layer=norm_layer if self.patch_norm else None)num_patches = self.patch_embed.num_patchespatches_resolution = self.patch_embed.patches_resolutionself.patches_resolution = patches_resolution# absolute position embeddingif self.ape:self.absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim))trunc_normal_(self.absolute_pos_embed, std=.02)self.pos_drop = nn.Dropout(p=drop_rate)# stochastic depthdpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule# build layersself.layers = nn.ModuleList()for i_layer in range(self.num_layers):layer = BasicLayer(dim=int(embed_dim * 2 ** i_layer),input_resolution=(patches_resolution[0] // (2 ** i_layer),patches_resolution[1] // (2 ** i_layer)),depth=depths[i_layer],num_heads=num_heads[i_layer],window_size=window_size,mlp_ratio=self.mlp_ratio,qkv_bias=qkv_bias, qk_scale=qk_scale,drop=drop_rate, attn_drop=attn_drop_rate,drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],norm_layer=norm_layer,downsample=PatchMerging if (i_layer < self.num_layers - 1) else None,use_checkpoint=use_checkpoint)self.layers.append(layer)self.norm = norm_layer(self.num_features)self.avgpool = nn.AdaptiveAvgPool1d(1)self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()self.apply(self._init_weights)def _init_weights(self, m):if isinstance(m, nn.Linear):trunc_normal_(m.weight, std=.02)if isinstance(m, nn.Linear) and m.bias is not None:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.LayerNorm):nn.init.constant_(m.bias, 0)nn.init.constant_(m.weight, 1.0)@torch.jit.ignoredef no_weight_decay(self):return {'absolute_pos_embed'}@torch.jit.ignoredef no_weight_decay_keywords(self):return {'relative_position_bias_table'}def forward_features(self, x):x = self.patch_embed(x)if self.ape:x = x + self.absolute_pos_embedx = self.pos_drop(x)for layer in self.layers:x = layer(x)x = self.norm(x) # B L Cx = self.avgpool(x.transpose(1, 2)) # B C 1x = torch.flatten(x, 1)return xdef forward(self, x):x = self.forward_features(x)x = self.head(x)return xdef flops(self):flops = 0flops += self.patch_embed.flops()for i, layer in enumerate(self.layers):flops += layer.flops()flops += self.num_features * self.patches_resolution[0] * self.patches_resolution[1] // (2 ** self.num_layers)flops += self.num_features * self.num_classesreturn flopsdef _create_swin_transformer(variant, pretrained=False, default_cfg=None, **kwargs):if default_cfg is None:default_cfg = deepcopy(default_cfgs[variant])overlay_external_default_cfg(default_cfg, kwargs)default_num_classes = default_cfg['num_classes']default_img_size = default_cfg['input_size'][-2:]num_classes = kwargs.pop('num_classes', default_num_classes)img_size = kwargs.pop('img_size', default_img_size)if kwargs.get('features_only', None):raise RuntimeError('features_only not implemented for Vision Transformer models.')model = build_model_with_cfg(SwinTransformer, variant, pretrained,default_cfg=default_cfg,img_size=img_size,num_classes=num_classes,pretrained_filter_fn=checkpoint_filter_fn,**kwargs)return model@register_model
def swin_base_patch4_window7_224(pretrained=False, **kwargs):""" Swin-B @ 224x224, pretrained ImageNet-22k, fine tune 1k"""model_kwargs = dict(patch_size=4, window_size=7, embed_dim=128, depths=(2, 2, 18, 2), num_heads=(4, 8, 16, 32), **kwargs)return _create_swin_transformer('swin_base_patch4_window7_224', pretrained=pretrained, **model_kwargs)@register_model
def swin_base_patch4_window12_384(pretrained=False, **kwargs):""" Swin-B @ 384x384, pretrained ImageNet-22k, fine tune 1k"""model_kwargs = dict(patch_size=4, window_size=12, embed_dim=128, depths=(2, 2, 18, 2), num_heads=(4, 8, 16, 32), **kwargs)return _create_swin_transformer('swin_base_patch4_window12_384', pretrained=pretrained, **model_kwargs)
model = model = swin_base_patch4_window7_224(pretrained=True).to(device)
E:\Miniconda3\envs\paper\lib\site-packages\torch\functional.py:478: UserWarning: torch.meshgrid: in an upcoming release, it will be required to pass the indexing argument. (Triggered internally at C:\actions-runner\_work\pytorch\pytorch\builder\windows\pytorch\aten\src\ATen\native\TensorShape.cpp:2895.)return _VF.meshgrid(tensors, **kwargs) # type: ignore[attr-defined]
# loss function
criterion = nn.CrossEntropyLoss()
# optimizer
optimizer = optim.Adam(model.parameters(), lr=lr)
# scheduler
scheduler = StepLR(optimizer, step_size=1, gamma=gamma)
for epoch in range(epochs):epoch_loss = 0epoch_accuracy = 0for data, label in tqdm(train_loader):data = data.to(device)label = label.to(device)output = model(data)loss = criterion(output, label)optimizer.zero_grad()loss.backward()optimizer.step()acc = (output.argmax(dim=1) == label).float().mean()epoch_accuracy += acc / len(train_loader)epoch_loss += loss / len(train_loader)with torch.no_grad():epoch_val_accuracy = 0epoch_val_loss = 0for data, label in valid_loader:data = data.to(device)label = label.to(device)val_output = model(data)val_loss = criterion(val_output, label)acc = (val_output.argmax(dim=1) == label).float().mean()epoch_val_accuracy += acc / len(valid_loader)epoch_val_loss += val_loss / len(valid_loader)print(f"Epoch : {epoch + 1} - loss : {epoch_loss:.4f} - acc: {epoch_accuracy:.4f} - val_loss : {epoch_val_loss:.4f} - val_acc: {epoch_val_accuracy:.4f}\n") 0%| | 0/313 [00:00本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!