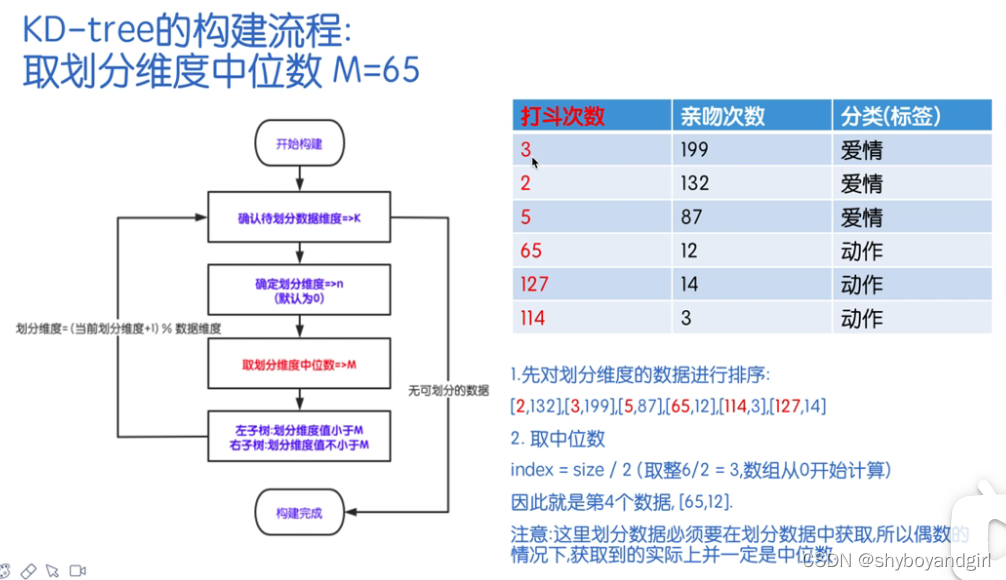
KD树构建---kd树的三维代码和二维代码C++
1、三维空间点代码:
1、kdtree.h
/*** @file kdtree.h* @brief Thisis a brief description.* @author dongjian* @par Copyright (c):* All Rights Reserved* @date 2018:04:24 * @note mattersneeding attention*/
#ifndef _5383BD42_370E_4C00_A25E_AD4403E5656A
#define _5383BD42_370E_4C00_A25E_AD4403E5656A
#include 2、kdtree.cpp 含demo实现
#include "kdtree.h"
#include 结果:
2、二维空间代码
1、kdtree_new.h
//
// KDTree.h
// Test
//
// Created by xiuzhu on 2021/7/13.
//#ifndef kdtree_new_h
#define kdtree_new_h#include 2、kdtree_new.cpp
//
// KDTree.cpp
// Test
//
// Created by xiuzhu on 2021/7/13.
//
#include "kdtree_new.h"
#include 本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!