ABB机器人PCSDK使用(二)
ABB机器人PCSDK包开发上位机
扫描网络上可用的控制器


if (Common.scanner == null){Common.scanner = new NetworkScanner();}Common.scanner.Scan();this.listView1.Items.Clear();ControllerInfoCollection controllers = Common.scanner.Controllers;Common.robotCount = controllers.Count;foreach (ControllerInfo info in controllers){ListViewItem listViewItem = new ListViewItem(info.SystemName);//listViewItem.Text = info.SystemName.ToString();listViewItem.SubItems.Add(info.IPAddress.ToString());listViewItem.SubItems.Add(info.Version.ToString());listViewItem.SubItems.Add(info.IsVirtual.ToString());listViewItem.SubItems.Add(info.ControllerName.ToString());listViewItem.Tag = info;this.listView1.Items.Add(listViewItem);}if (Common.robotCount == 1){ListViewItem item = this.listView1.Items[0];if (item.Tag != null){ControllerInfo info = (ControllerInfo)item.Tag;if (info.Availability == Availability.Available){if (Common.controller != null){Common.controller.Logoff();Common.controller.Dispose();Common.controller = null;}Common.controller = new Controller(info);Common.controller.Logon(UserInfo.DefaultUser);}}}
我此处是扫描到一个机器人控制器的话,就直接连接该控制器
if (Common.robotCount == 1){ListViewItem item = this.listView1.Items[0];if (item.Tag != null){ControllerInfo info = (ControllerInfo)item.Tag;if (info.Availability == Availability.Available){if (Common.controller != null){Common.controller.Logoff();Common.controller.Dispose();Common.controller = null;}Common.controller = new Controller(info);Common.controller.Logon(UserInfo.DefaultUser);}}}
读取和修改机器人单个数据


读取和修改机器人的数据为数组


对机器人IO信号的读取和更改


对机器人MOD文件上传和下载


机器人系统备份

机器人重启

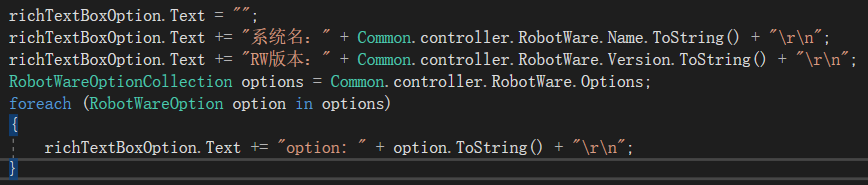
获取机器人选项信息
获取机器人运行时间

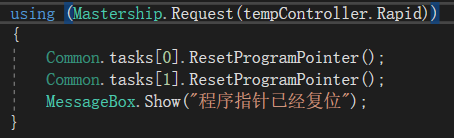
PP移动至main
设置指针到指定例行程序

获取例行程序

获取当前关节坐标和世界坐标


设置机器人运行速度倍率

ABB机器人PCSDK使用(一)
ABB机器人PCSDK使用(三)
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!