Arduino上位机调试工具:Windows Remote Arduino
Arduino上位机调试工具:Windows Remote Arduino
Windows Remote Arduino - 🌼功能演示

🛠安装教程(以Windows 10系统为例)
在浏览器搜索栏直接搜索关键字Windows Remote Arduino,点击安装,将自带打开Windows系统上的应用商店。
当然你也可以打开Windows10系统自带的应用商店,搜索并下载此应用。

- 🌿我这里安装了就不做演示了,没安装的话,下图是获取并安装的按钮

- 🌿安装完毕后,给Arduino UNO开发板烧录指定的固件后才能通过此工具和Arduino UNo开发板通讯并连接上。
🔨固件烧录
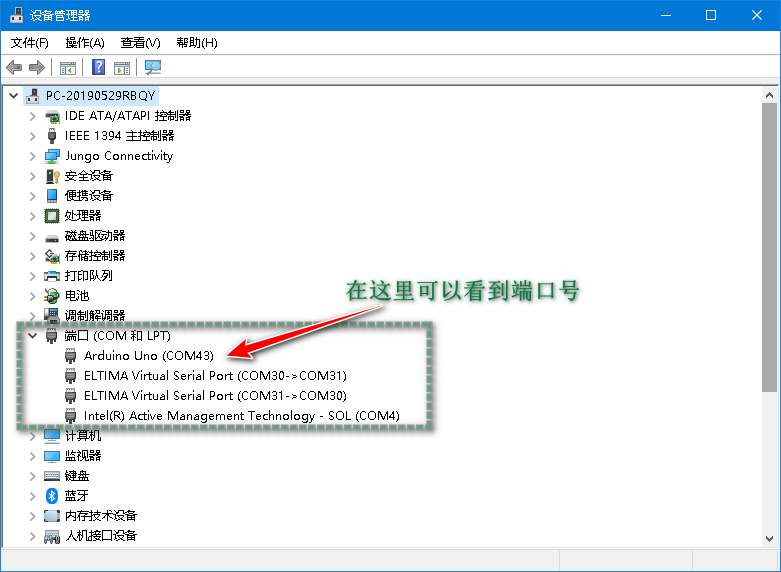
1. 连接上Arduino UNO开发板
- 查看连接的端口号:
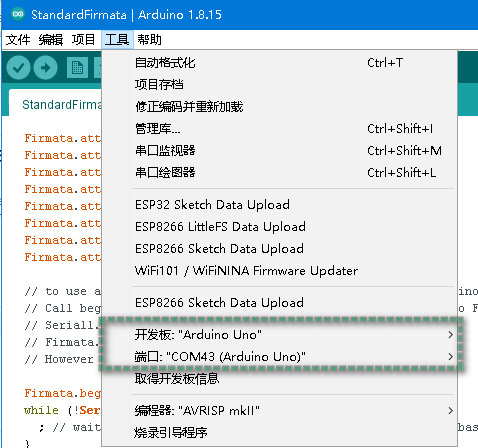
- 选择开发板型号:
2. 选择烧录指定的程序
- 如果手上有支持蓝牙的或者WIFI的 Arduino开发板可以选择其对应的固件示例代码进行烧录。这里只演示Arduino UNo开发板,所以选择
StandardFirmata此示例。
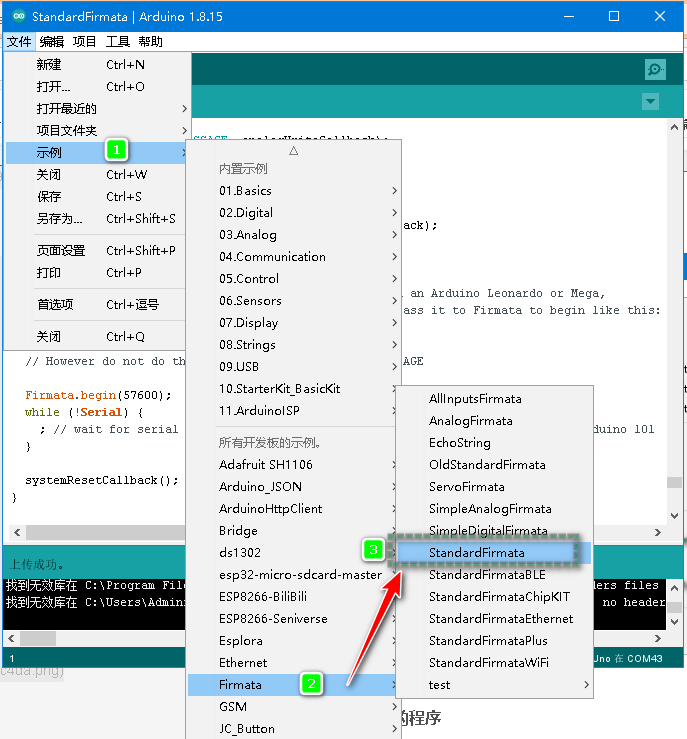
除了
StandardFirmata也可以选择StandardFirmataPlus,与标准版的固件不同的地方是模拟IO口输出的时候,输出的数值变化要缓慢一些,方便观察。
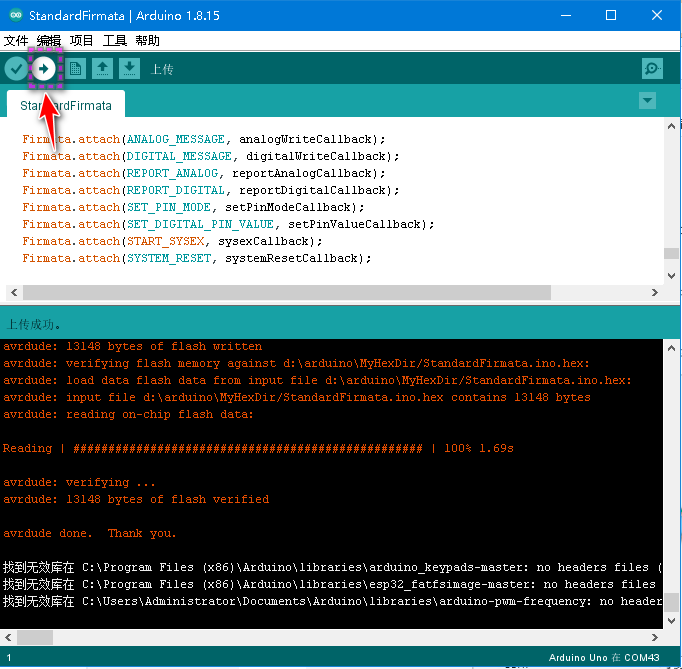
- 编译上传到Arduino UNO开发上。(如果不修改波特率默认
56700,就可以直接点击上传即可完成)
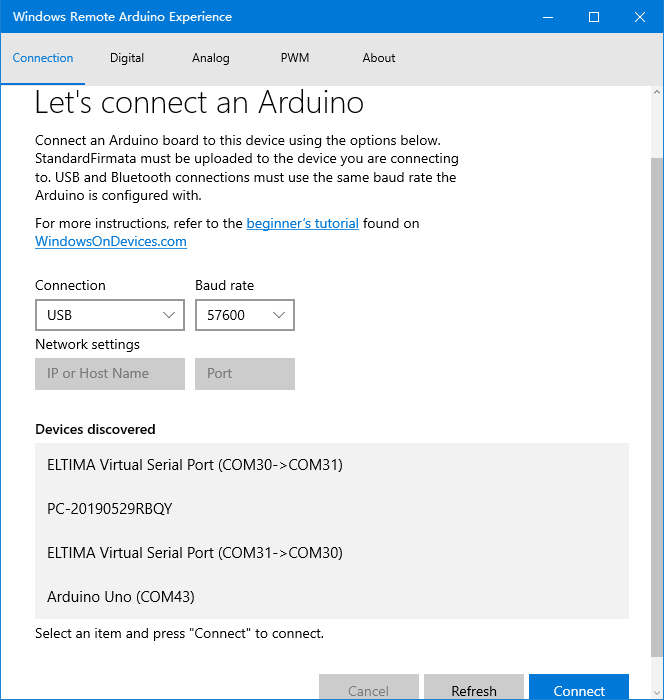
调试教程
1. 通过USB连接到Arduino UNO开发板
固件烧录时,如果没有修改的话,默认的波特率是
57600.
2.控制界面操作
包含数字IO口控制,模拟口控制、以及PWM口控制。
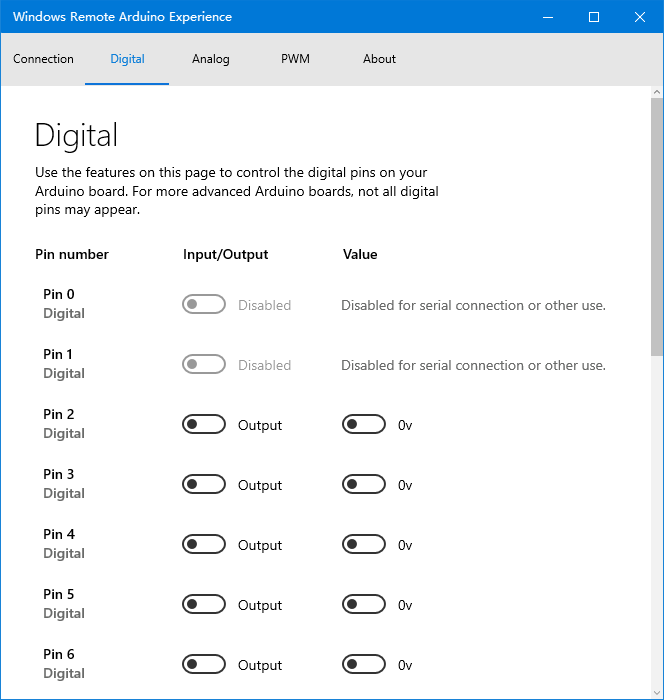
-
通过鼠标点击PIN13的设置为Output,连接在IO13上的板载led灯将被点亮。

-
通过设置Pin 5 的PWM输出使能引脚,并将值调到32
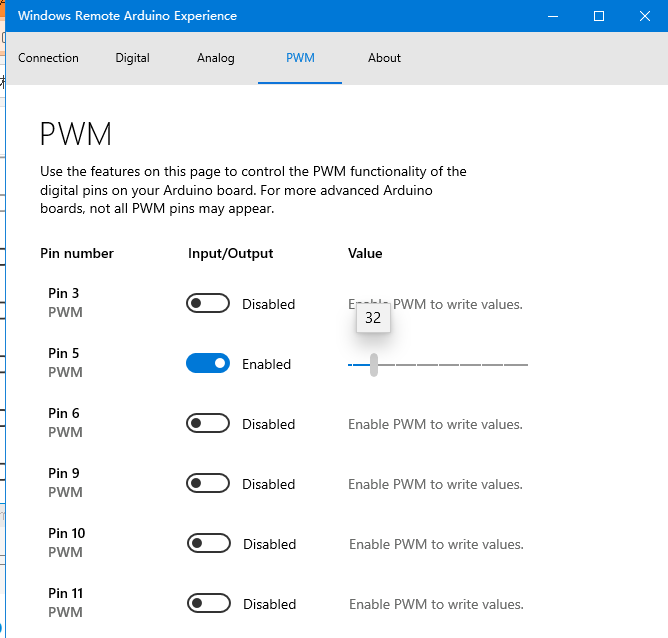
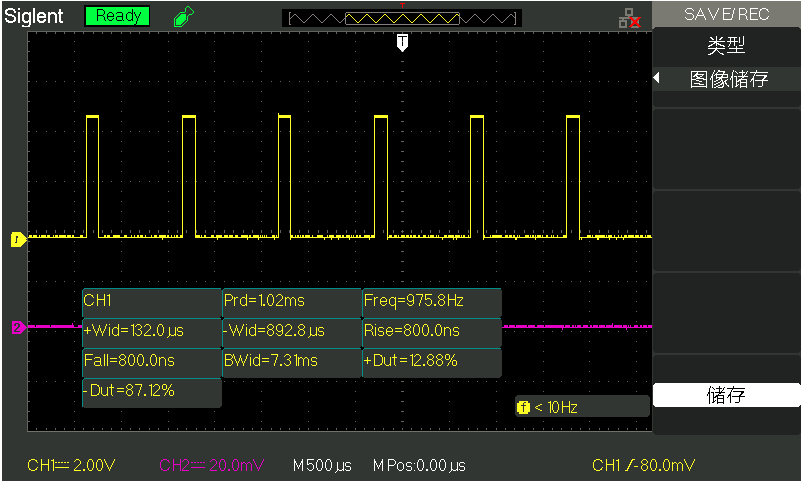
- 示波器采集到的波形参数,占空比是12.88%,相当接近。
32 255 = 0.1254901960784314 \frac{32}{255} = 0.1254901960784314 25532=0.1254901960784314
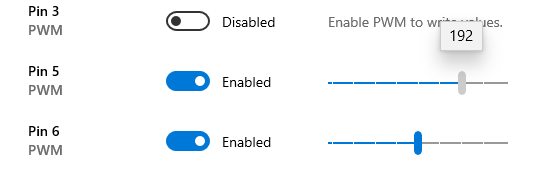
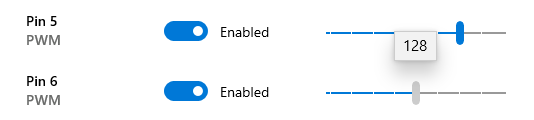
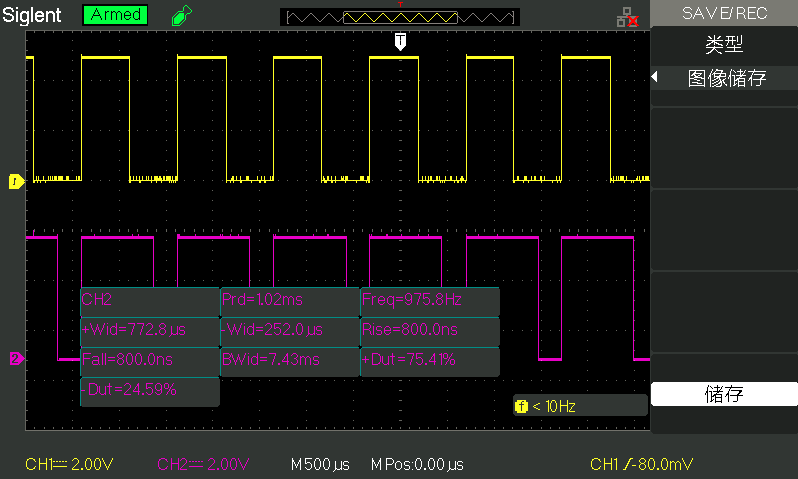
- 同时测试Pin5和Pin6,PWM数字调至192,和128.
- 示波器截取的波形图像

- 模拟端口打开后,不能像PWM那样给定一个具体值,这里的值是一个不断变化的数字。
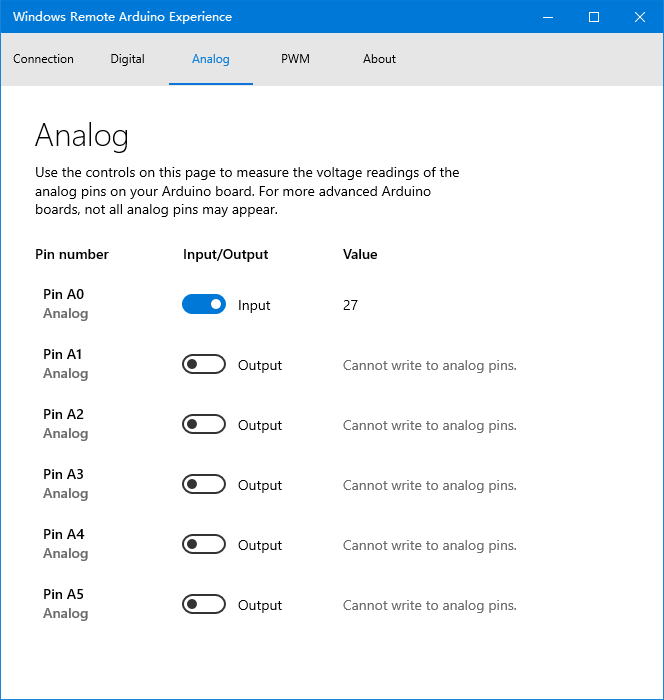
- 针对Arduino UNo开发板只能测试这些功能。
还提供了其它的两种连接方式;蓝牙和网络IP连接
由于手上没有相关的开发板无法进行测试。

相关代码
StandardFirmata代码
#include StandardFirmataPlus代码
#include | 读书不觉已春深,一寸光阴一寸金。____王贞白《白鹿洞二首·其一》 |
|---|
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!