读书笔记:无人机控制(五)
目录
- 垂直起降飞行器的数学建模与非线性控制
- RUAV
- 动力学模型
- 刚体动力学 (Rigid Body Dynamics)
- 空气动力学力与力矩 (Aerodynamics Forces and Torques)
- 非线性分层飞行控制器的设计与稳定性
- 飞行控制器设计
- 稳定性证明
垂直起降飞行器的数学建模与非线性控制
该部分介绍为 UAV 设计非线性飞行控制器的主要步骤。该控制系统基于旋翼 UVA 的非线性模型,采用内外环控制方案,考虑了系统的非线性和耦合性,设计了一种易于实现和调试的实用控制器。利用级联系统理论证明了完全闭环系统的渐近稳定性。
RUAV
旋翼机无人机(RUAV)被广泛应用于多种应用,主要是军用和民用。在城市和室内等复杂杂乱的环境中,在空中监视、侦察和检查具有重大优势。它们的实用性源于其低成本、小尺寸、垂直起降(VTOL)能力以及在极低高度飞行、悬停、巡航和实现攻击性机动的能力。
实际中,RUAV 自动驾驶仪的设计具有许多理论和技术挑战。由于其复杂的动力学、非线性以及控制输入和状态变量之间的高度耦合,设计可靠且鲁棒的控制器是一个挑战。此外,微型飞行器有限的有效载荷对导航传感器和机载电子设备的选择造成了严重限制。在过去十年中,大多数小型RUAV的研究活动都集中于通过推导其动力学的数学模型和合成基本稳定性控制器来解决这些问题。
该部分的目标是设计一个实用的非线性飞行控制器,该控制器具有以下特点:
- 基于 RUAV 的数学模型,考虑了系统的非线性以及控制变量和状态变量之间的耦合。
- 是一个多用途控制器,可处理不同的飞行模式,如悬停、向前飞行、侧向飞行、起飞和着陆、轨迹跟踪等。
- 保证了整个闭环系统的渐近稳定性。
- 实现板载微处理器很简单,且其结果是良好的飞行性能。
keyword : 级联子系统;渐近稳定性
动力学模型
刚体动力学 (Rigid Body Dynamics)
首先,将旋翼 UAV 视为具有六个空间自由度的刚体。
刚体动力学建模的目的是找到将系统输出(位置和方向)转换为输入(力和扭矩向量)的微分方程。Newton–Euler 方程给出受外力矢量 F b ∈ R 3 F^{b} \in \mathbb{R}^3 Fb∈R3 和扭矩矢量 Γ b ∈ R 3 \Gamma^{b} \in \mathbb{R}^3 Γb∈R3 的影响的质量为 m ∈ R m \in \mathbb{R} m∈R 的刚体和惯性矩阵 J ∈ R 3 × 3 J \in \mathbb{R}^{3 \times 3} J∈R3×3 的运动方程,即
{ m V ˙ + Ω × m V = F b , J Ω ˙ + Ω × J Ω = Γ b . (1) \begin{cases} m \dot{V} + \Omega \times m V & = F^{b}, \\ J \dot{\Omega} + \Omega \times J \Omega & = \Gamma^{b}. \end{cases} \tag{1} {mV˙+Ω×mVJΩ˙+Ω×JΩ=Fb,=Γb.(1)
其中, V = ( u , v , w ) V = (u, v, w) V=(u,v,w) 和 Ω = ( p , q , r ) \Omega = (p, q, r) Ω=(p,q,r) 分别是物体固定参考系中的线速度和角速度; F F F 包含了重力、主推力等。该方程建立的坐标系为 body frame。
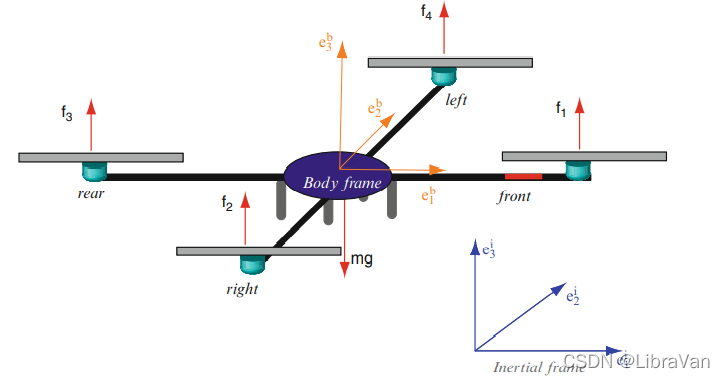
不失一般性地,使用欧拉角参数化,从 body frame 到惯性系的旋转矩阵为 R = R ψ R θ R ϕ = [ cos θ cos ψ sin ϕ sin θ cos ψ − cos ϕ sin ψ cos ϕ sin θ cos ψ + sin ϕ sin ψ cos θ sin ψ sin ϕ sin θ sin ψ + cos ϕ cos ψ cos ϕ sin θ sin ψ − sin ϕ cos ψ − sin θ sin ϕ cos θ cos ϕ cos θ ] , \begin{aligned} R & = R_{\psi} R_{\theta} R_{\phi} \\ & = \begin{bmatrix} \cos \theta \cos \psi & \sin \phi \sin \theta \cos \psi - \cos \phi \sin \psi & \cos \phi \sin \theta \cos\psi + \sin \phi \sin \psi \\ \cos \theta \sin \psi & \sin \phi \sin \theta \sin \psi + \cos \phi \cos \psi & \cos \phi \sin \theta \sin \psi - \sin \phi \cos \psi \\ -\sin \theta & \sin \phi \cos \theta & \cos \phi \cos \theta \end{bmatrix}, \end{aligned} R=RψRθRϕ=⎣⎡cosθcosψcosθsinψ−sinθsinϕsinθcosψ−cosϕsinψsinϕsinθsinψ+cosϕcosψsinϕcosθcosϕsinθcosψ+sinϕsinψcosϕsinθsinψ−sinϕcosψcosϕcosθ⎦⎤, 其中, η = ( ϕ , θ , ψ ) \eta = (\phi, \theta, \psi) η=(ϕ,θ,ψ) 代表三个欧拉角的矢量。进而,可将重力与其他作用力分离,且平移动力学可表示为
ξ ˙ = v , m v ˙ = R F b − m g e 3 i . \begin{aligned} \dot{\xi} & = v, \\ m \dot{v} & = R F^{b} - m g e_{3}^{i}. \end{aligned} ξ˙mv˙=v,=RFb−mge3i. 此处, ξ \xi ξ 和 v v v 表示位置与速度。
在相关文献中,除去基于欧拉角表示旋转动力学外,基于四元数也是一种常用方法。
首先建立角速度 Ω \Omega Ω 与欧拉角 η \eta η 的映射关系,即 η ˙ = Φ ( η ) Ω , (2) \dot{\eta} = \Phi(\eta) \Omega, \tag{2} η˙=Φ(η)Ω,(2) 其中欧拉矩阵 Φ ( η ) = [ 1 sin ϕ tan θ cos ϕ tan θ 0 cos ϕ − sin θ 0 sin ϕ sec θ cos ϕ sec θ ] . \Phi(\eta) = \begin{bmatrix} 1 & \sin \phi \tan \theta & \cos \phi \tan \theta \\ 0 & \cos \phi & - \sin \theta \\ 0 & \sin \phi \sec \theta & \cos \phi \sec \theta \end{bmatrix}. Φ(η)=⎣⎡100sinϕtanθcosϕsinϕsecθcosϕtanθ−sinθcosϕsecθ⎦⎤. 对 (2) 中的时间进行微分,结合 (1) 可得 η ¨ = Φ ˙ Ω = Φ ˙ Ψ η ˙ − Φ J − 1 s k ( Ω ) J Ω + Φ J − 1 Γ b , (3) \ddot{\eta} = \dot{\Phi} \Omega = \dot{\Phi} \Psi \dot{\eta} - \Phi J^{-1} {\rm sk}(\Omega) J \Omega + \Phi J^{-1} \Gamma^{b}, \tag{3} η¨=Φ˙Ω=Φ˙Ψη˙−ΦJ−1sk(Ω)JΩ+ΦJ−1Γb,(3) 此处的算子 s k : R 3 → R 3 × 3 {\rm sk} : \mathbb{R}^{3} \to \mathbb{R}^{3 \times 3} sk:R3→R3×3,且 $ s k ( x ) {\rm sk}(x) sk(x) 是一个与向量积相关的斜对称矩阵,即 s k ( x ) y ≜ x × y . {\rm sk}(x) y \triangleq x \times y. sk(x)y≜x×y.
在 (3) 两侧同乘以 M ( η ) = Ψ ( η ) T J Ψ ( η ) M(\eta) = \Psi(\eta)^{\rm T} J \Psi(\eta) M(η)=Ψ(η)TJΨ(η),可得 M ( η ) η ¨ + C ( η , η ˙ ) η ˙ = Ψ ( η ) Γ b , M(\eta) \ddot{\eta} + C(\eta, \dot{\eta}) \dot{\eta} = \Psi(\eta) \Gamma^{b}, M(η)η¨+C(η,η˙)η˙=Ψ(η)Γb, 其中 Coriolis 项 C ( η , η ˙ ) = − Ψ ( η ) T J Ψ ( η ˙ ) + Ψ ( η ) T s k ( Ψ ( η ) η ˙ ) J Ψ ( η ) C(\eta, \dot{\eta}) = - \Psi(\eta)^{\rm T} J \Psi(\dot{\eta}) + \Psi(\eta)^{\rm T} {\rm sk}(\Psi(\eta)\dot{\eta})J \Psi(\eta) C(η,η˙)=−Ψ(η)TJΨ(η˙)+Ψ(η)Tsk(Ψ(η)η˙)JΨ(η).
因此,用于飞行控制设计的 RUAV 非线性模型为
{ m ξ ¨ = R F b − m g e 3 i , M ( η ) η ¨ + C ( η , η ˙ ) η ˙ = Ψ ( η ) T Γ b . (4) \begin{cases} m \ddot{\xi} = R F^{b} - m g e_{3}^{i}, \\ M(\eta) \ddot{\eta} + C(\eta, \dot{\eta}) \dot{\eta} = \Psi(\eta)^{\rm T} \Gamma^{b}. \end{cases} \tag{4} {mξ¨=RFb−mge3i,M(η)η¨+C(η,η˙)η˙=Ψ(η)TΓb.(4)
空气动力学力与力矩 (Aerodynamics Forces and Torques)
具体而言,本部分给出 (4) 中的 F b F^{b} Fb 和 Γ b \Gamma^{b} Γb.
大多数垂直起降飞行器都是欠驱动机械系统,具有六个自由度和四个主控制输入。事实上,许多小型旋翼机无人机的特点是有三个主要控制力矩 τ = ( τ ϕ , τ θ , τ ψ ) T \tau = (\tau_{\phi}, \tau_{\theta}, \tau_{\psi})^{\rm T} τ=(τϕ,τθ,τψ)T 和一个主控制力 F b = ( 0 , 0 , u ) T F{b} = (0, 0, u)^{\rm T} Fb=(0,0,u)T。假设忽略由控制输入耦合和其他小的力和力矩(如气动效应、转子动力学、陀螺效应等)。
假设螺旋桨推力和扭矩与转子角速度 ω \omega ω 的平方成正比,产生力和控制力矩的代数模型可以写成
[ u τ ϕ τ θ τ ψ ] = [ ρ ρ ρ ρ 0 − l ρ 0 − l ρ − l ρ 0 l ρ 0 κ − κ κ − κ ] [ ω 1 2 ω 2 2 ω 3 2 ω 4 2 ] \begin{bmatrix} u \\ \tau_{\phi} \\ \tau_{\theta} \\ \tau_{\psi} \end{bmatrix} = \begin{bmatrix} \rho & \rho & \rho & \rho \\ 0 & - l \rho & 0 & - l \rho \\ -l \rho & 0 & l \rho & 0 \\ \kappa & - \kappa & \kappa & - \kappa \end{bmatrix} \begin{bmatrix} \omega_{1}^{2} \\ \omega_{2}^{2} \\ \omega_{3}^{2} \\ \omega_{4}^{2} \end{bmatrix} ⎣⎢⎢⎡uτϕτθτψ⎦⎥⎥⎤=⎣⎢⎢⎡ρ0−lρκρ−lρ0−κρ0lρκρ−lρ0−κ⎦⎥⎥⎤⎣⎢⎢⎡ω12ω22ω32ω42⎦⎥⎥⎤
进而 (4) 可以写为
{ m ξ ¨ = u R e 3 i − m g e 3 i , M ( η ) η ¨ + C ( η , η ˙ ) η ˙ = Ψ ( η ) T τ . (5) \begin{cases} m \ddot{\xi} = u R e_{3}^{i} - m g e_{3}^{i}, \\ M(\eta) \ddot{\eta} + C(\eta, \dot{\eta}) \dot{\eta} = \Psi(\eta)^{\rm T} \tau. \end{cases} \tag{5} {mξ¨=uRe3i−mge3i,M(η)η¨+C(η,η˙)η˙=Ψ(η)Tτ.(5)
非线性分层飞行控制器的设计与稳定性
目标是设计一个在实践和理论上都表现良好的 3D 飞行控制器。事实上,控制系统需要易于实施和调整,同时保证良好的飞行性能。此外,分析闭环系统的稳定性也很重要。为了实现这一目标,利用旋翼机无人机模型的结构特性,将旋翼机模型分为两个相互连接的子系统。具有快速动力学的内环执行姿态跟踪并产生所需扭矩。具有慢动力学的外环用于产生推力和参考角,以遵循指令的平动轨迹,并证明了完全连通系统的渐近稳定性。
飞行控制器设计
强耦合非线性系统的控制器设计具有重要的现实意义和理论挑战,因而,通过将非线性模型 (5) 转换为两个由非线性互联项耦合的线性子系统,讨论微型旋翼无人机的控制设计。
通过变量替换 τ = J Ψ ( η ) τ ~ + Ψ − 1 C ( η , η ˙ ) η ˙ , \tau = J \Psi(\eta) \tilde{\tau} + \Psi^{- 1} C(\eta, \dot{\eta}) \dot{\eta}, τ=JΨ(η)τ~+Ψ−1C(η,η˙)η˙, 结合 R R R 的表达式可将 (5) 转化为
{ x ¨ = 1 m u ( cos ϕ sin θ cos ψ + sin ϕ sin ψ ) , y ¨ = 1 m u ( cos ϕ sin θ sin ψ − sin ϕ cos ψ ) , z ¨ = 1 m u cos ϕ cos θ − g , ϕ ¨ = τ ~ ϕ , θ ¨ = τ ~ θ , ψ ¨ = τ ~ ψ . (6) \begin{cases} \ddot{x} = \frac{1}{m} u \left(\cos \phi \sin \theta \cos \psi + \sin \phi \sin \psi\right), \\ \ddot{y} = \frac{1}{m} u \left(\cos \phi \sin \theta \sin \psi - \sin \phi \cos \psi\right), \\ \ddot{z} = \frac{1}{m} u \cos \phi \cos \theta - g, \\ \ddot{\phi} = \tilde{\tau}_{\phi}, \\ \ddot{\theta} = \tilde{\tau}_{\theta}, \\ \ddot{\psi} = \tilde{\tau}_{\psi}. \end{cases} \tag{6} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎧x¨=m1u(cosϕsinθcosψ+sinϕsinψ),y¨=m1u(cosϕsinθsinψ−sinϕcosψ),z¨=m1ucosϕcosθ−g,ϕ¨=τ~ϕ,θ¨=τ~θ,ψ¨=τ~ψ.(6) 基于上式,将系统转换为两个级联子系统。
- 首先定义一个虚拟控制向量 μ ∈ R 3 \mu \in \mathbb{R}^{3} μ∈R3: μ = f ( u , ϕ d , θ d , ψ s ) = 1 m u R ( ϕ d , θ d , ψ s ) e 3 i − g e 3 i . \mu = f(u, \phi_{d}, \theta_{d}, \psi_{s}) = \frac{1}{m} u R(\phi_{d}, \theta_{d}, \psi_{s}) e_{3}^{i} - g e_{3}^{i}. μ=f(u,ϕd,θd,ψs)=m1uR(ϕd,θd,ψs)e3i−ge3i. 此处, f : R 3 → R 3 f: \mathbb{R}^{3} \to \mathbb{R}^{3} f:R3→R3 是一个连续可逆函数。进一步地,控制向量的分量给定为 { μ x = 1 m u ( cos ϕ d sin θ d cos ψ d + sin ϕ d sin ψ d ) , μ y = 1 m u ( cos ϕ d sin θ d sin ψ d − sin ϕ d cos ψ d ) , μ z = 1 m u cos ϕ d cos θ d − g . \begin{cases} \mu_{x} = \frac{1}{m} u \left(\cos \phi_{d} \sin \theta_{d} \cos \psi_{d} + \sin \phi_{d} \sin \psi_{d}\right), \\ \mu_{y} = \frac{1}{m} u \left(\cos \phi_{d} \sin \theta_{d} \sin \psi_{d} - \sin \phi_{d} \cos \psi_{d}\right), \\ \mu_{z} = \frac{1}{m} u \cos \phi_{d} \cos \theta_{d} - g. \end{cases} ⎩⎪⎨⎪⎧μx=m1u(cosϕdsinθdcosψd+sinϕdsinψd),μy=m1u(cosϕdsinθdsinψd−sinϕdcosψd),μz=m1ucosϕdcosθd−g. 该分量用于跟踪某些参考轨迹。
- 上述控制输入可由外环控制器计算得出 ( u , ϕ d , θ d ) = f − 1 ( μ x , μ y , μ z ) (u, \phi_{d}, \theta_{d}) = f^{- 1} (\mu_{x}, \mu_{y}, \mu_{z}) (u,ϕd,θd)=f−1(μx,μy,μz),即 { u = m μ x 2 + μ y 2 + ( μ z + g ) 2 , ϕ d = sin − 1 ( m μ x sin ψ d − μ y cos ψ d u ) , θ d = tan − 1 ( μ x cos ψ d + μ y sin ψ d μ z + g ) . \begin{cases} u = m \sqrt{\mu_{x}^{2} + \mu_{y}^{2} + (\mu_{z} + g)^{2}}, \\ \phi_{d} = \sin^{-1}\left(m \frac{\mu_{x} \sin \psi_{d} - \mu_{y} \cos \psi_{d}}{u}\right), \\ \theta_{d} = \tan^{-1}\left(\frac{\mu_{x} \cos \psi_{d} + \mu_{y} \sin \psi_{d}}{\mu_{z} + g}\right). \end{cases} ⎩⎪⎪⎪⎨⎪⎪⎪⎧u=mμx2+μy2+(μz+g)2,ϕd=sin−1(muμxsinψd−μycosψd),θd=tan−1(μz+gμxcosψd+μysinψd).
- 由于所需角度 $(\phi_{d}, \theta_{d}, ψ d ) \psi_{d}) ψd) 是定向子系统的输出,因此不能立即分配或提供。因此,它们被视为内环控制器的参考轨迹。因此,定义跟踪误差向量 e = ( e η , e η ˙ ) T ∈ R 6 e = (e_{\eta}, e_{\dot{\eta}})^{\rm T} \in \mathbb{R}^{6} e=(eη,eη˙)T∈R6,其中 e η = η − η d , e η ˙ = η ˙ − η ˙ d e_{\eta} = \eta - \eta_{d}, e_{\dot{\eta}} = \dot{\eta} - \dot{\eta}_{d} eη=η−ηd,eη˙=η˙−η˙d。基于误差系统,(6) 可以写为 { x ¨ = 1 m u [ ( cos ϕ d sin θ d cos ψ d + sin ϕ d sin ψ d ) + h x ( ϕ d , θ d , ψ d , e ϕ , e θ , e ψ ) ] = μ x + 1 m u h x ( ⋅ ) , y ¨ = 1 m u [ ( cos ϕ d sin θ d sin ψ d − sin ϕ d cos ψ d ) + h y ( ϕ d , θ d , ψ d , e ϕ , e θ , e ψ ) ] = μ y + 1 m u h y ( ⋅ ) , z ¨ = 1 m u [ cos ϕ cos θ + h z ( ϕ d , θ d , e ϕ , e θ ) ] − g = μ z + + 1 m u h z ( ⋅ ) . \begin{cases} \ddot{x} = \frac{1}{m} u \left[\left(\cos \phi_{d} \sin \theta_{d} \cos \psi_{d} + \sin \phi_{d} \sin \psi_{d}\right) + h_{x}(\phi_{d}, \theta_{d}, \psi_{d}, e_{\phi}, e_{\theta}, e_{\psi})\right] = \mu_{x} + \frac{1}{m} u h_{x}(\cdot), \\ \ddot{y} = \frac{1}{m} u \left[\left(\cos \phi_{d} \sin \theta_{d} \sin \psi_{d} - \sin \phi_{d} \cos \psi_{d}\right) + h_{y}(\phi_{d}, \theta_{d}, \psi_{d}, e_{\phi}, e_{\theta}, e_{\psi})\right] = \mu_{y} + \frac{1}{m} u h_{y}(\cdot), \\ \ddot{z} = \frac{1}{m} u \left[\cos \phi \cos \theta + h_{z}(\phi_{d}, \theta_{d}, e_{\phi}, e_{\theta})\right] - g = \mu_{z} + + \frac{1}{m} u h_{z}(\cdot). \end{cases} ⎩⎪⎨⎪⎧x¨=m1u[(cosϕdsinθdcosψd+sinϕdsinψd)+hx(ϕd,θd,ψd,eϕ,eθ,eψ)]=μx+m1uhx(⋅),y¨=m1u[(cosϕdsinθdsinψd−sinϕdcosψd)+hy(ϕd,θd,ψd,eϕ,eθ,eψ)]=μy+m1uhy(⋅),z¨=m1u[cosϕcosθ+hz(ϕd,θd,eϕ,eθ)]−g=μz++m1uhz(⋅).
- 通过定义位置-速度跟踪误差 χ = ( ξ − ξ d , ν − ν d ) T ∈ R 6 \chi = (\xi - \xi_{d}, \nu - \nu_{d})^{\rm T} \in \mathbb{R}^{6} χ=(ξ−ξd,ν−νd)T∈R6,结合上式与 (6) 可写作矩阵形式。
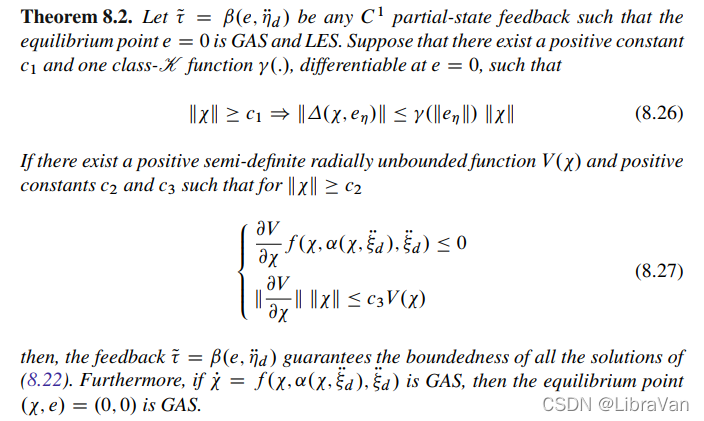
稳定性证明
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!