电机PID调试
电机PID调试
- 电机PID调试
- 一、直流电机原理与TB6612
- 1.1 电机原理
- 1.2 减速器作用
- 1.3 电机实物接线图
- 1.4 电机控制芯片
- 二、编码器使用以及测速原理
- 2.1 编码器原理
- 2.1 编码器接线
- 2.1 编码器软件四倍
- 三、离散化PID入门
- 四、位置PID控制基础
- 4.1 原理分析
- 4.1 控制原理图
- 4.1 C语言实现
电机PID调试
一、直流电机原理与TB6612
1.1 电机原理
1.2 减速器作用

如上:
假设电机本身
电机转速:10000rpm(每分钟转10000转)
关节扭矩:1kg;
那么如果加入减速器(减速比为20):
则电机输出就会变为:
电机转速:500rpm
关节扭矩:16kg(实际上会有损耗,我们这里设定为 80% )
显然,减速器起到两个作用:
1.降低电机转速;
2.增加电机扭矩;
1.3 电机实物接线图

只需要电机正负加载电压后就可以实现电机转动。
1.4 电机控制芯片
电机控制芯片:TB6612
通常我们使用单片机来给电机调速,但是由于单片机IO口输出的带负载能力是比较弱的,所以一般会通过电机功率放大器件去增大电压;
常用的驱动芯片:
L298N电机驱动板模块。
控制芯片的接线:
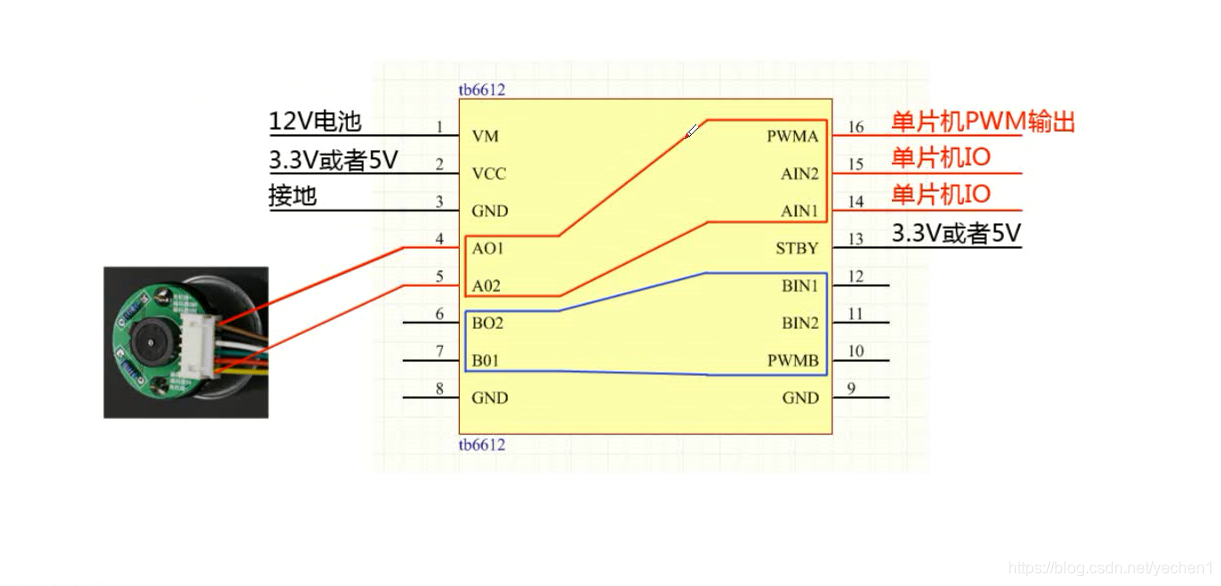
VM:直流电机相近的电压,例如电机需要接12v电压时候,可以通过一个3s电池进行相连;
VCC,GND:内部逻辑电压;
STBY:是IO口使能端,高电平有效;
红框,篮框:是两路独立电机控制端;
| 接口 | Value |
|---|---|
| AO1 | 接电机正负极,反接只影响电机的正反转 |
| AO2 | 对应AO1 |
| PWMA | 控制PWM波,实现0-100%的占空比控制 |
| AIN1 | 正反转控制 |
| AIN2 | 对应AIN1 |
二、编码器使用以及测速原理
2.1 编码器原理

一般装两组霍尔或者光电,会得到AB两相脉冲信号;
根据单位时间的脉冲个数可以得到速度;根据相位差可以对方向进行判断;
2.1 编码器接线

红线,接电源一般是5v;
2.1 编码器软件四倍

四倍频主要是测量AB相的上升和下降沿(就是所有跳变个数 );
原来单个脉冲的上升沿个数只有3个,现在所有跳变相加为12个;相当于四倍频;
stm32在编码器模式下,其TIM1-TIM4的通道1(CH1),通道2(CH2)都可以进行硬件四倍频计数,在配置一下相关寄存器;
但是有些低端单片机,如51等,没有硬件计数,只能通过软件计数(中断等);
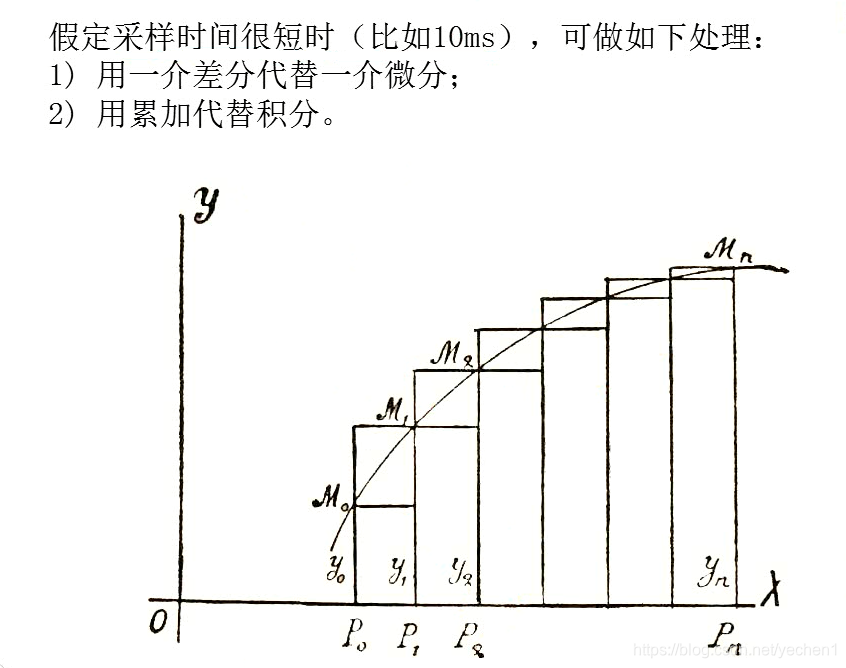
三、离散化PID入门
用离散化的差分方程代替连续的微分方程。
四、位置PID控制基础
4.1 原理分析
位置闭环控制就是根据编码器的脉冲累加测量电的位置信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程

4.1 控制原理图

反馈值(测量值)- 设定值(目标值)= 控制偏差;
控制偏差给到控制器;
从而将偏差给到电机,在经过编码器获得反馈;
实现闭环;
4.1 C语言实现

本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!