机械臂运动学学习记录
机械臂运动学学习记录
本文为机械臂运动学的学习记录,有部分图片来自网络和相关书籍,如有侵犯,请联系,稍后会予以删除。
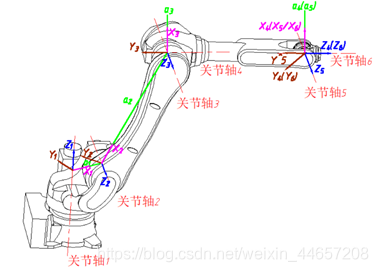
01建立坐标系
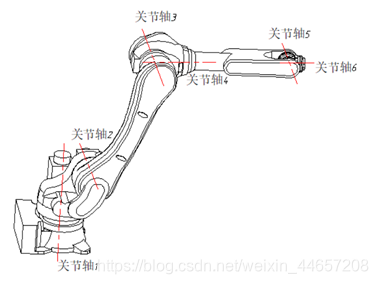
1.找出各关节轴,画出轴线的延长线,使用红色点画线标出关节轴;
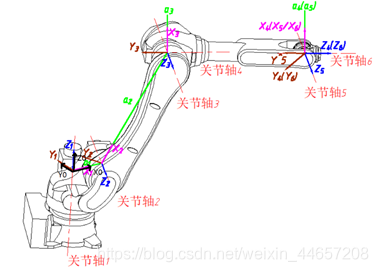
2.找出关节轴i与i+1的公垂线或关节轴i与i+1的交点,以关节轴i和i+1的交点或者公垂线与关节轴i的交点作为连杆坐标系{i}的原点;
●公垂线a1 :关节轴1和关节轴2相交,公垂线a1 选择为过交点的公垂线;
●公垂线 a2:关节轴2和关节轴3相互平行,有无数条公垂线,如图所示选择一条;
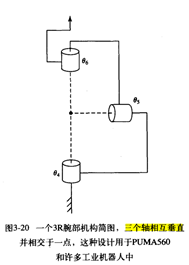
●公垂线 a3:关节轴3和关节轴4相互垂直且相交,公垂线 a3选择为过交点的公垂线;
●由于关节轴4、5、6采用图示的关系耦合在一起,所以公垂线 a4和 a5重合;
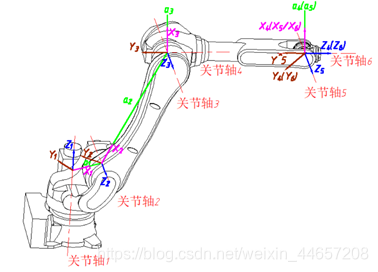
3.规定 Zi轴的指向, 如图所示选择Z轴的方向;
4.规定Xi轴的方向Xi轴与公垂线重合,如果关节轴i和i+1相交,规定 Xi轴垂直于关节轴i和i+1所在的平面;
5.按右手定则确定Yi 轴;
6.规定参考坐标系{0}与坐标系{1}重合;
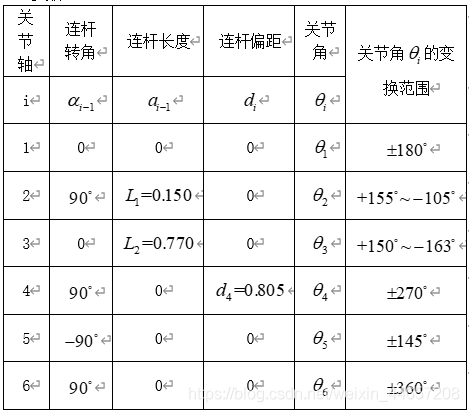
02列写D-H参数表
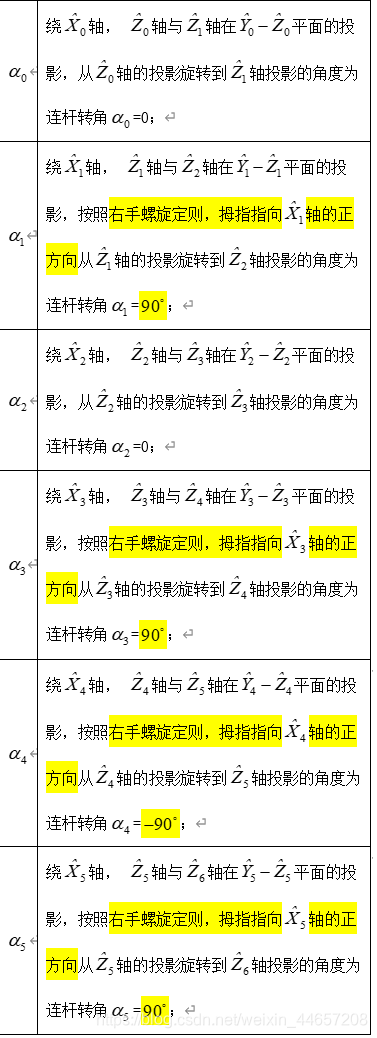

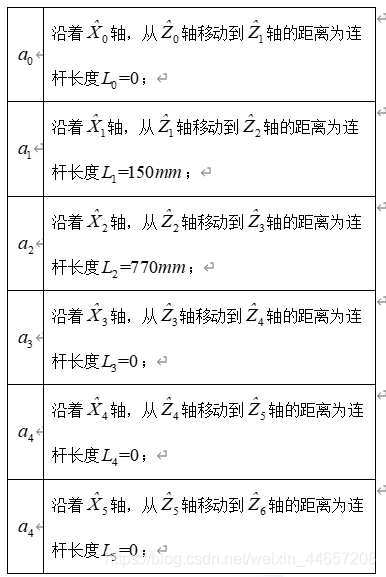
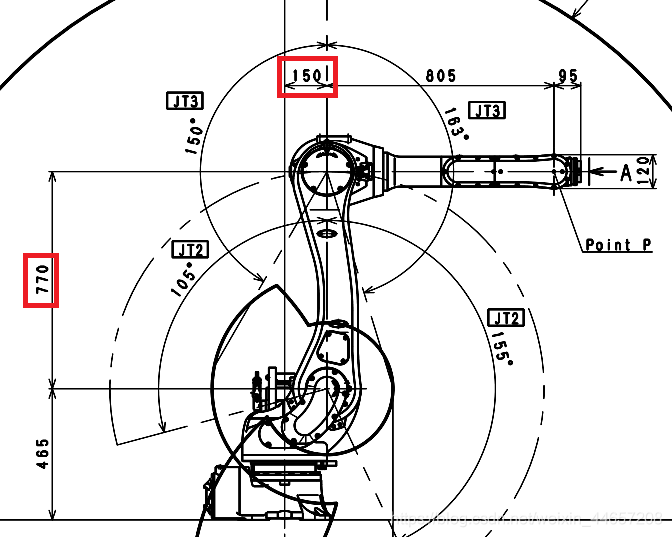

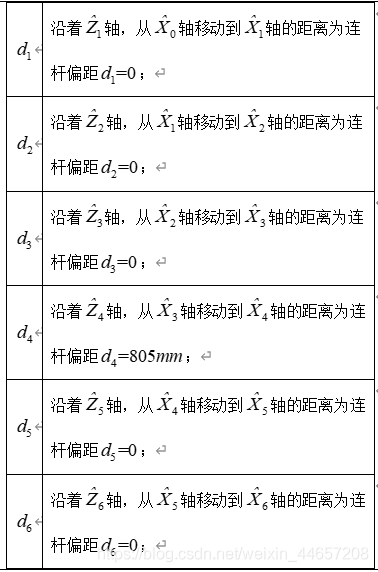
根据上述内容,列写RA020N的D-H参数表:
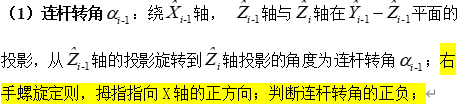
03正运动学分析
1.根据连杆的变换矩阵的一般公式:
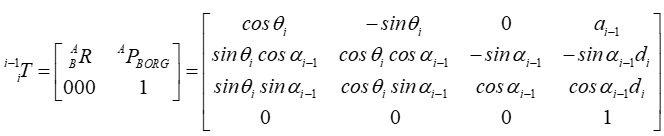
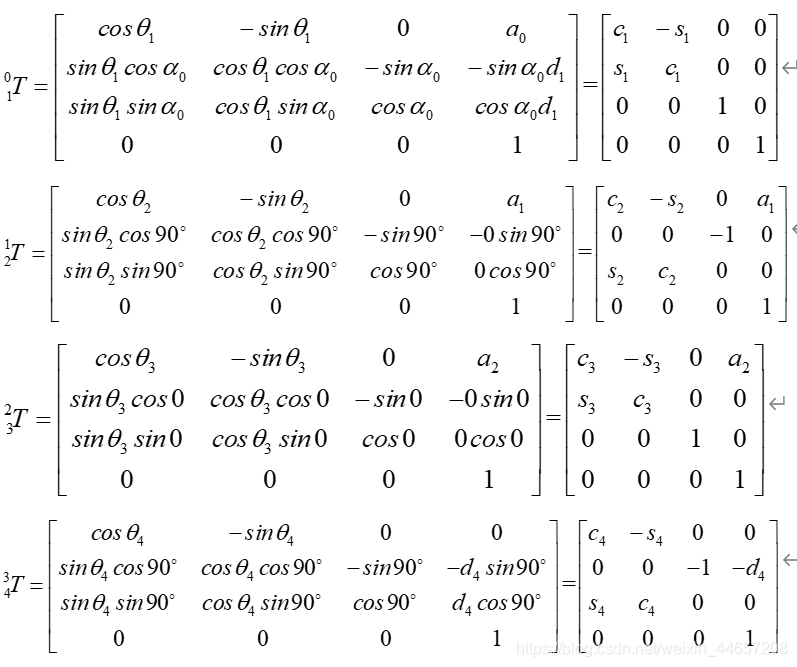
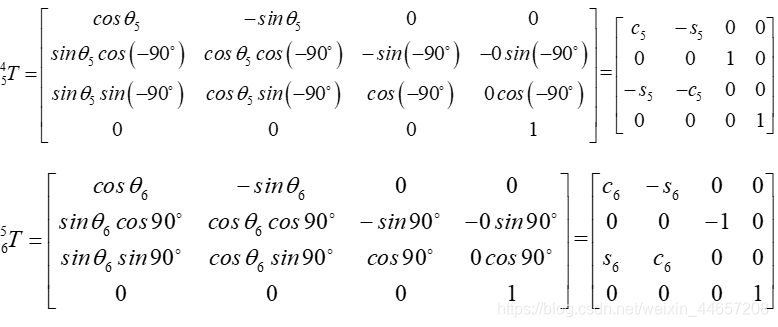
代入D-H参数的具体值可以得到每一个连杆的变换矩阵:
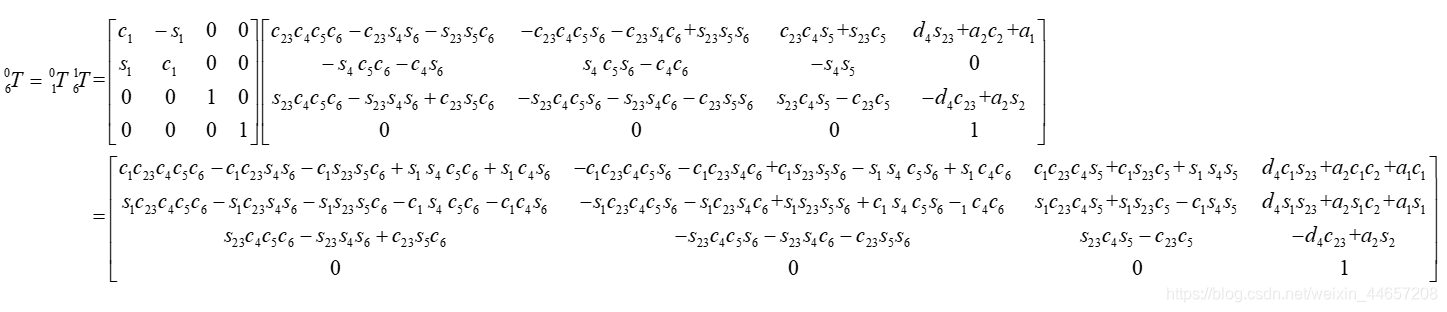
工业机器人腕部坐标系与参考坐标系的关系为:

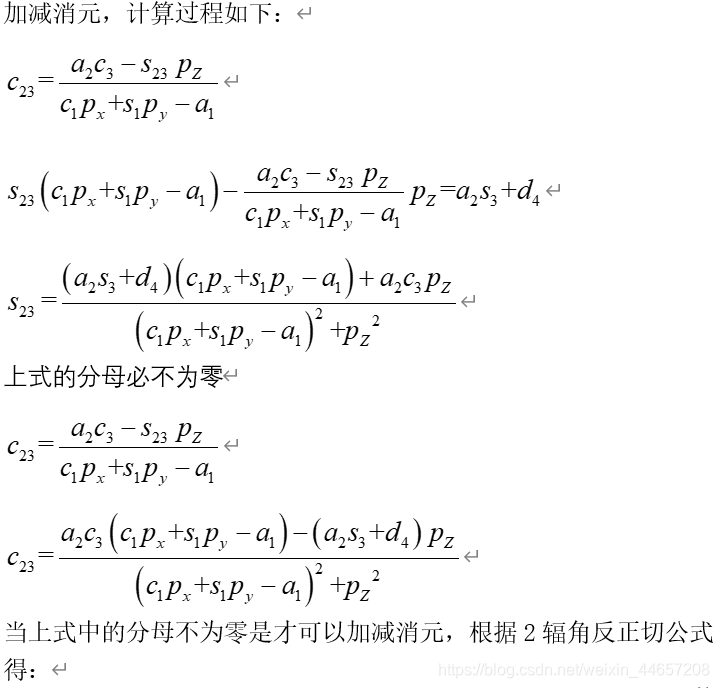
计算过程如下所示:
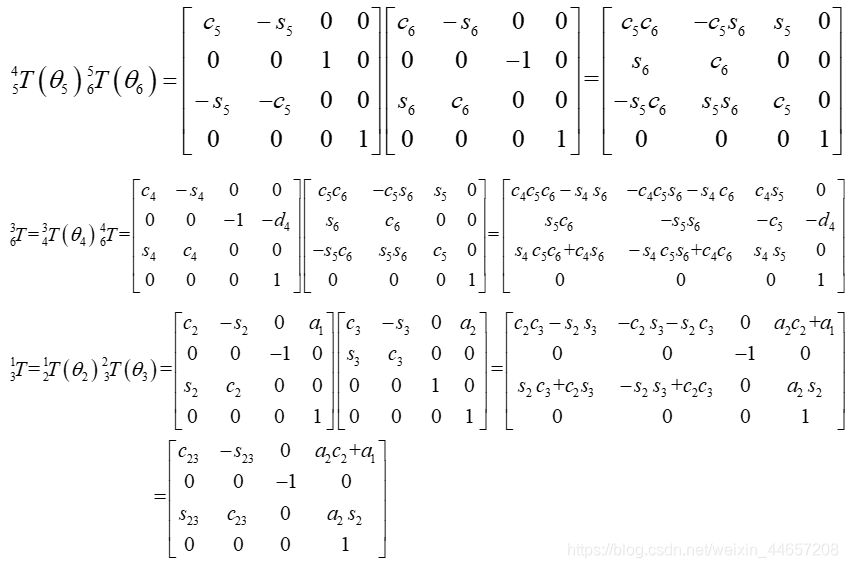
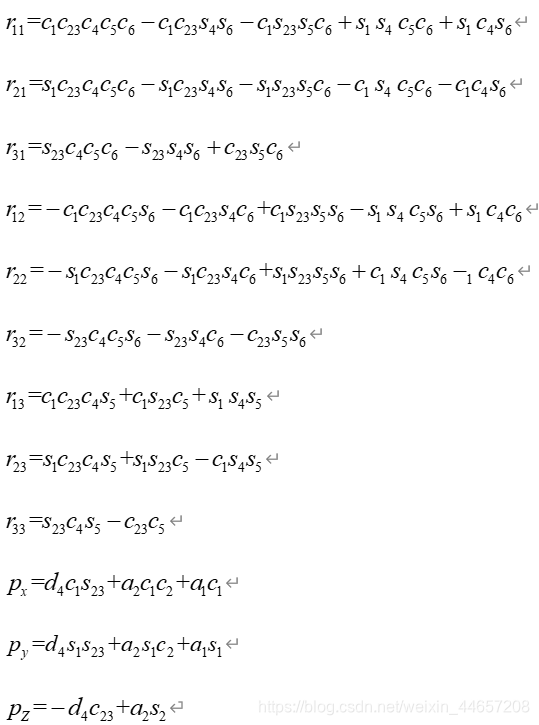
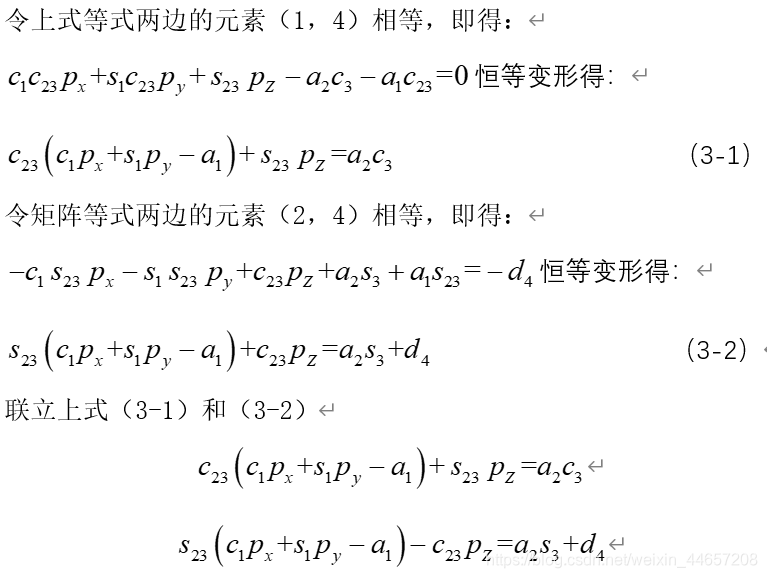
 联立上式:
联立上式:
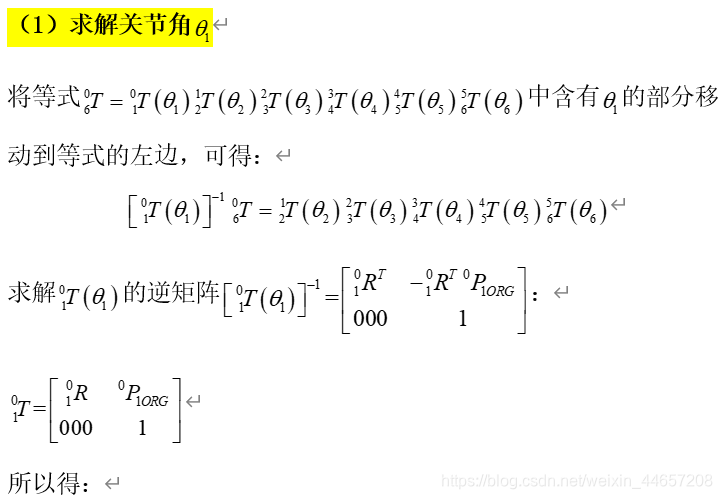
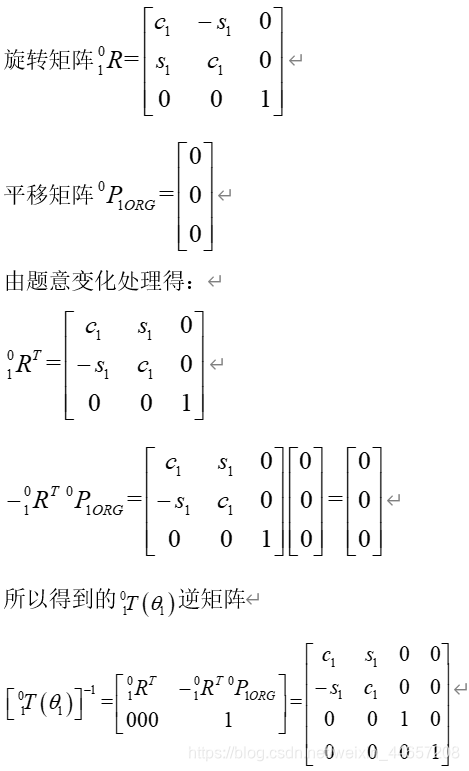
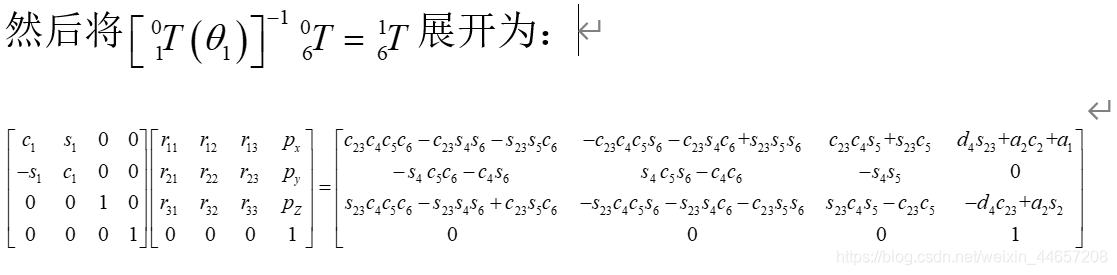
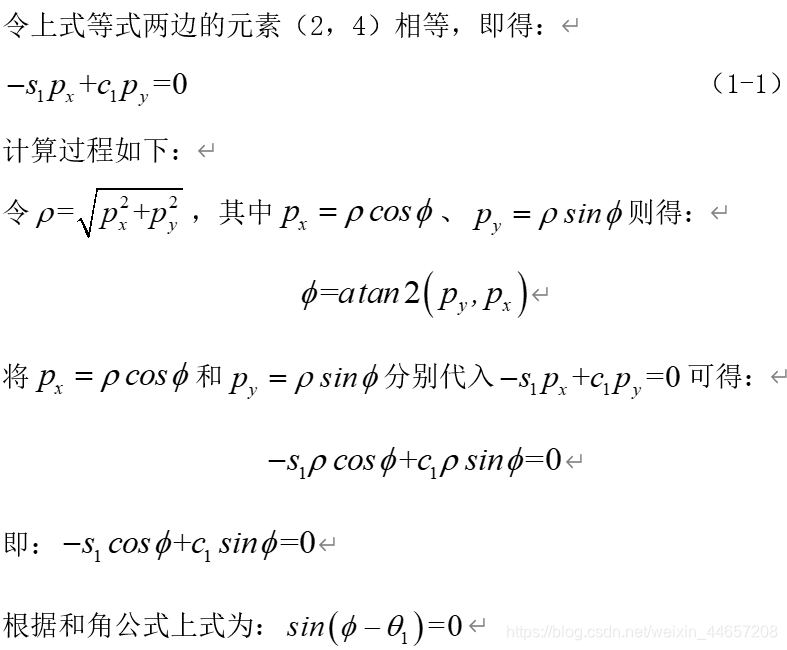
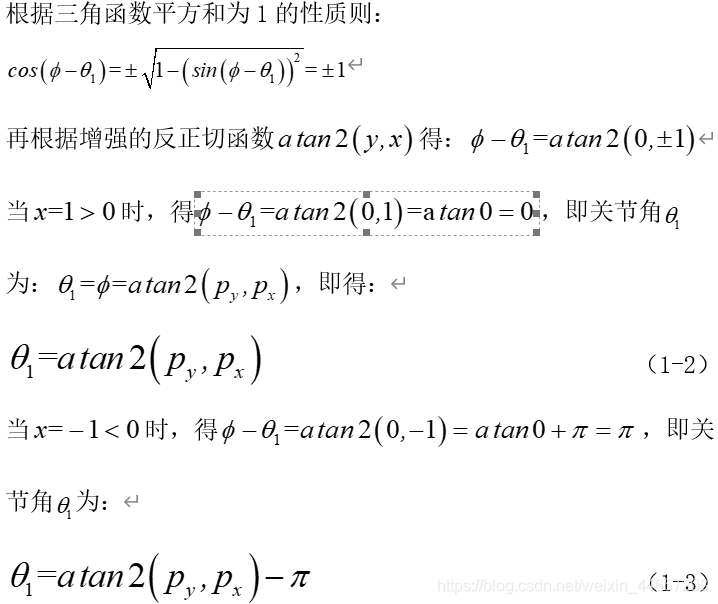
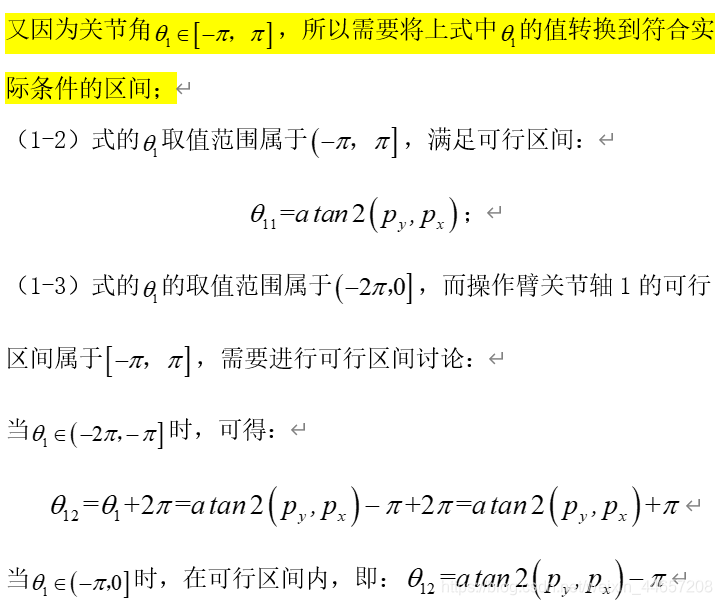
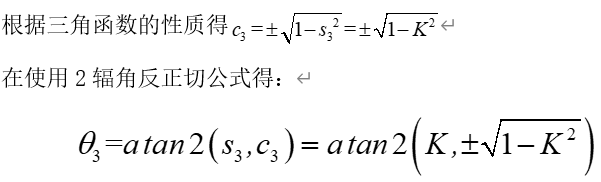
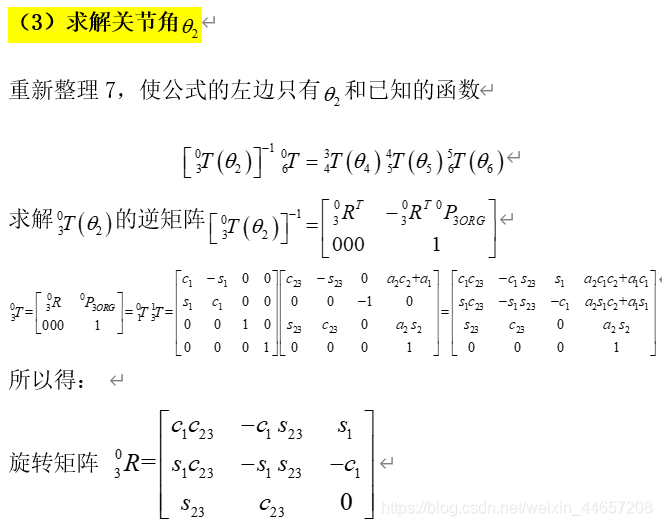
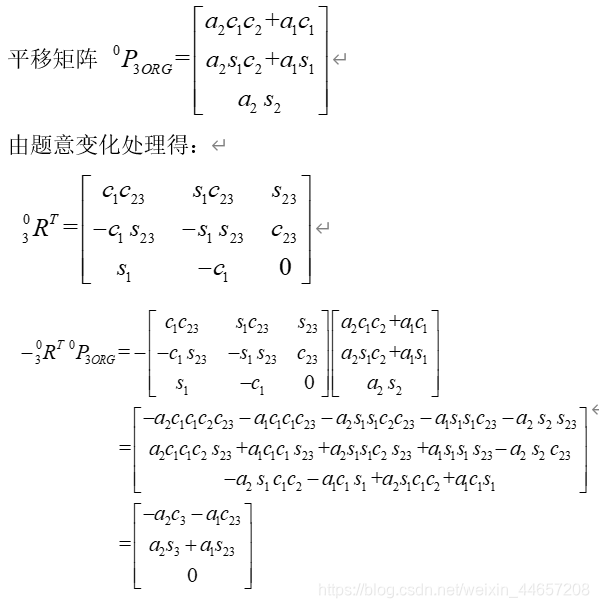
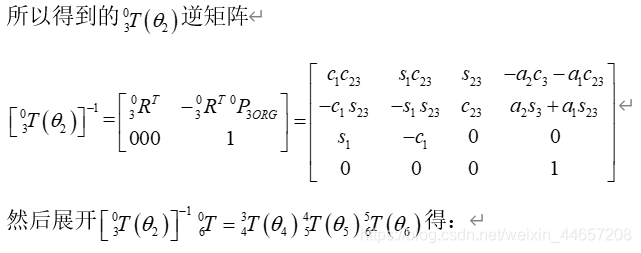
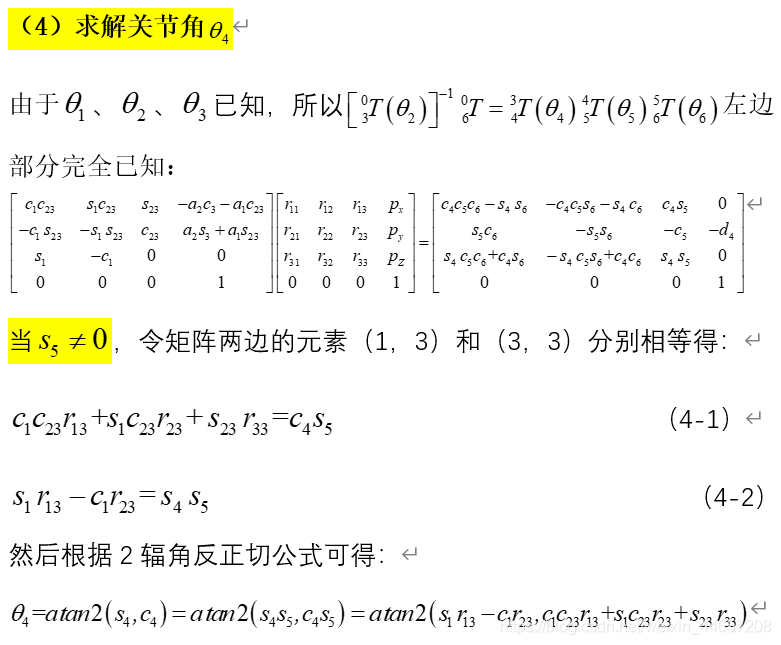
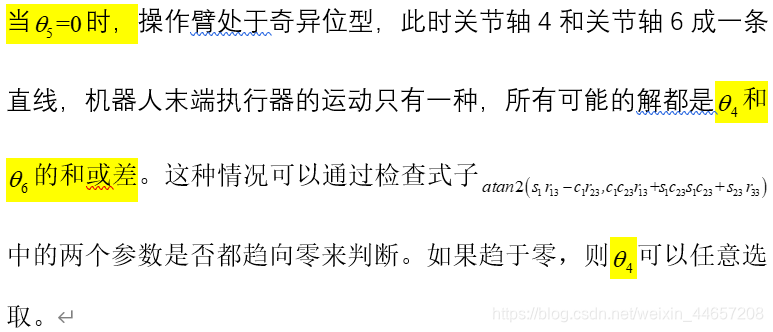
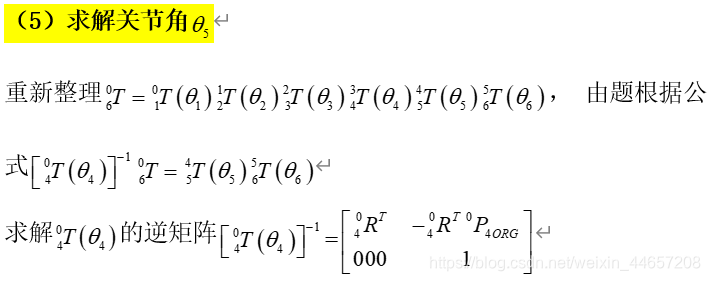
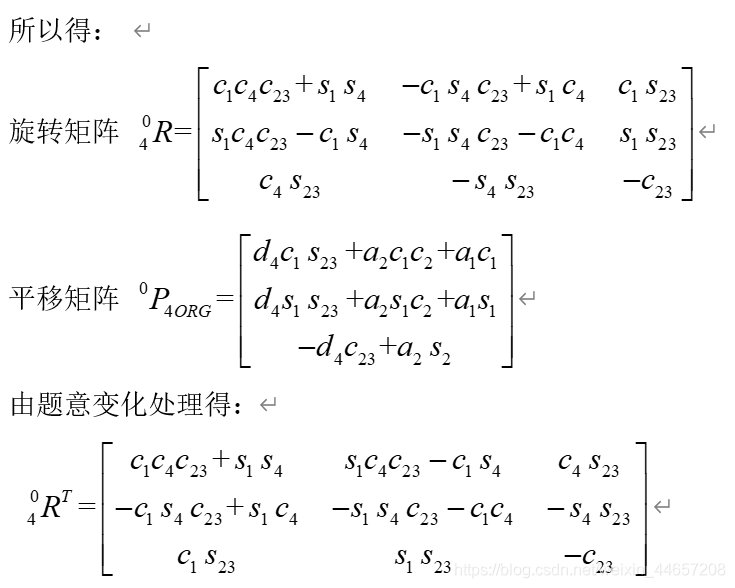
04六自由度工业机器人逆运动学












本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!