学习笔记--电磁场与电磁波(1)
电磁场与电磁波
文章目录
- 电磁场与电磁波
- 1 数学基础
- 1.1 矢量分析
- 1.1.1 基本定义
- 1.1.2 矢量基本运算
- 1.2 场的分析
- 1.2.1 场的分析方法(即函数的分析方法)
- 1.2.2 场的宏观分析
- 标量场(函数)的等值面
- 矢量场的矢量线
- 1.2.3 场的微观分析
- 标量场(函数)的方向导数和梯度
- 梯度运算法则
- 梯度计算
- 矢量场(函数)的通量和散度
- 矢量场(函数)的环量和旋度
- 两个重要恒等式
- 1.4 亥姆霍兹定理
- 1.5 三种坐标系
- 1.5.1 直角坐标系
- 1.5.2 柱坐标系
- 1.5.3 球坐标系
1 数学基础
1.1 矢量分析
1.1.1 基本定义
-
矢量:既有大小又有方向的量;
-
标量:只有大小没有方向的量;
-
矢量函数:一元矢量函数的定义,给定自变量 t t t ,定义域为 [ a , b ] [a,b] [a,b] ,有一种对应关系 A ⃗ = A ⃗ ( t ) \vec{A}=\vec{A}(t) A=A(t),则称 A ⃗ \vec{A} A 是 t t t 的一元矢量函数。
-
时空矢量函数:在直角坐标系下,以空间和时间为自变量的四元矢量函数可以表示为:
A ⃗ = A ⃗ ( x , y , z , t ) = A x ( x , y , z , t ) e ⃗ x + A y ( x , y , z , t ) e ⃗ y + A z ( x , y , z , t ) e ⃗ z = A x e ⃗ x + A y e ⃗ y + A z e ⃗ z \begin{align} \vec{A} &= \vec{A}(x,y,z,t) \\ &= A_x(x,y,z,t)\vec{e}_x + A_y(x,y,z,t)\vec{e}_y + A_z(x,y,z,t)\vec{e}_z \\& =A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z \end{align} A=A(x,y,z,t)=Ax(x,y,z,t)ex+Ay(x,y,z,t)ey+Az(x,y,z,t)ez=Axex+Ayey+Azez
1.1.2 矢量基本运算
-
矢量加法:
A ⃗ + B ⃗ = ( A x e ⃗ x + A y e ⃗ y + A z e ⃗ z ) + ( B x e ⃗ x + B y e ⃗ y + B z e ⃗ z ) = ( A x + B x ) e ⃗ x + ( A y + B y ) e ⃗ y + ( A z + B z ) e ⃗ z \begin{align} \vec{A} +\vec{B} &= (A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z) + (B_x\vec{e}_x + B_y\vec{e}_y + B_z\vec{e}_z) \\& = (A_x+B_x)\vec{e}_x + (A_y+B_y)\vec{e}_y + (A_z+B_z)\vec{e}_z \end{align} A+B=(Axex+Ayey+Azez)+(Bxex+Byey+Bzez)=(Ax+Bx)ex+(Ay+By)ey+(Az+Bz)ez -
矢量减法:
A ⃗ − B ⃗ = ( A x e ⃗ x + A y e ⃗ y + A z e ⃗ z ) − ( B x e ⃗ x + B y e ⃗ y + B z e ⃗ z ) = ( A x − B x ) e ⃗ x + ( A y − B y ) e ⃗ y + ( A z − B z ) e ⃗ z \begin{align} \vec{A} - \vec{B} &= (A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z) - (B_x\vec{e}_x + B_y\vec{e}_y + B_z\vec{e}_z) \\& = (A_x-B_x)\vec{e}_x + (A_y-B_y)\vec{e}_y + (A_z-B_z)\vec{e}_z \end{align} A−B=(Axex+Ayey+Azez)−(Bxex+Byey+Bzez)=(Ax−Bx)ex+(Ay−By)ey+(Az−Bz)ez -
矢量点乘:
A ⃗ ⋅ B ⃗ = B ⃗ ⋅ A ⃗ = ( A x e ⃗ x + A y e ⃗ y + A z e ⃗ z ) ⋅ ( B x e ⃗ x + B y e ⃗ y + B z e ⃗ z ) = ( A x B x ) + ( A y B y ) + ( A z B z ) = ∣ A ⃗ ∣ ∣ B ⃗ ∣ cos θ \begin{align} \vec{A} \cdot \vec{B} &= \vec{B} \cdot \vec{A} \\&= (A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z) \cdot (B_x\vec{e}_x + B_y\vec{e}_y + B_z\vec{e}_z) \\& = (A_x B_x) + (A_y B_y) + (A_z B_z) \\& = |\vec{A}| |\vec{B}|\cos \theta \end{align} A⋅B=B⋅A=(Axex+Ayey+Azez)⋅(Bxex+Byey+Bzez)=(AxBx)+(AyBy)+(AzBz)=∣A∣∣B∣cosθ -
矢量叉乘:
A ⃗ × B ⃗ = − B ⃗ × A ⃗ = ( A x e ⃗ x + A y e ⃗ y + A z e ⃗ z ) × ( B x e ⃗ x + B y e ⃗ y + B z e ⃗ z ) = ∣ e ⃗ x e ⃗ y e ⃗ z A x A y A z B x B y B z ∣ = ( A y B z − A z B y ) e ⃗ x + ( A z B x − A x B z ) e ⃗ y + ( A x B y − A y B x ) e ⃗ z = n ⃗ ∣ A ⃗ ∣ ∣ B ⃗ ∣ sin θ \begin{align} \vec{A} \times \vec{B} &= - \vec{B} \times \vec{A} \\&= (A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z) \times (B_x\vec{e}_x + B_y\vec{e}_y + B_z\vec{e}_z) \\ \\& = \begin{vmatrix} \vec{e}_x & \vec{e}_y & \vec{e}_z\\ A_x & A_y & A_z\\ B_x & B_y & B_z\\ \end{vmatrix} \\ \\& = (A_y B_z - A_z B_y)\vec{e}_x + (A_z B_x - A_x B_z)\vec{e}_y + (A_x B_y - A_y B_x)\vec{e}_z \\& = \vec{n} |\vec{A}| |\vec{B}|\sin \theta \end{align} A×B=−B×A=(Axex+Ayey+Azez)×(Bxex+Byey+Bzez)= exAxBxeyAyByezAzBz =(AyBz−AzBy)ex+(AzBx−AxBz)ey+(AxBy−AyBx)ez=n∣A∣∣B∣sinθ
n ⃗ \vec{n} n 的方向符合右手定则。 -
矢量混合积:
A ⃗ × B ⃗ ⋅ C ⃗ = ( A ⃗ × B ⃗ ) ⋅ C ⃗ \begin{align} \vec{A} \times \vec{B} \cdot \vec{C} &= (\vec{A} \times \vec{B}) \cdot \vec{C} \end{align} A×B⋅C=(A×B)⋅C
先算叉乘再算点乘,计算结果为标量;重要矢量恒等式:
A ⃗ × B ⃗ ⋅ C ⃗ = B ⃗ × C ⃗ ⋅ A ⃗ = C ⃗ × A ⃗ ⋅ B ⃗ C ⃗ ⋅ A ⃗ × B ⃗ = A ⃗ ⋅ B ⃗ × C ⃗ = B ⃗ ⋅ C ⃗ × A ⃗ \begin{align} \vec{A} \times \vec{B} \cdot \vec{C} &= \vec{B} \times \vec{C} \cdot \vec{A} = \vec{C} \times \vec{A} \cdot \vec{B} \\ \vec{C} \cdot \vec{A} \times \vec{B} &= \vec{A} \cdot \vec{B} \times \vec{C} = \vec{B} \cdot \vec{C} \times \vec{A} \end{align} A×B⋅CC⋅A×B=B×C⋅A=C×A⋅B=A⋅B×C=B⋅C×A
1.2 场的分析
1.2.1 场的分析方法(即函数的分析方法)
1.2.2 场的宏观分析
标量场(函数)的等值面
定义:标量场仅有大小,具有相同函数值的点的集合,这些点组成一个曲面,该曲面称为等值面。
表示方式: A = A ( x , y , z , t 0 ) = C A=A(x,y,z,t_0)=C A=A(x,y,z,t0)=C, C C C为常数;
矢量场的矢量线
定义:矢量场既有大小又有方向,一般用一些有向线来形象地表示它的空间分布,这些有向线称为矢量线。
表示方式: A ⃗ = A x e ⃗ x + A y e ⃗ y + A z e ⃗ z \vec{A}=A_x\vec{e}_x+A_y\vec{e}_y+A_z\vec{e}_z A=Axex+Ayey+Azez
1.2.3 场的微观分析
标量场(函数)的方向导数和梯度
(1)标量场(函数)的方向导数
定义:在函数定义域内的点,对某一方向求导得的导数;
数学描述:
设标量场函数
φ = 抽象 φ ( M ) = 直坐标 φ ( x , y , z ) \varphi \overset{\text{抽象}}{=} \varphi (M) \overset{\text{直坐标}}{=} \varphi (x,y,z) φ=抽象φ(M)=直坐标φ(x,y,z)
定义域内,考察任意一点 M 0 M_0 M0,其邻域内,考察任意一点 M M M,前者向后者连线方向 l ⃗ \vec{l} l 构成某一方向,两点之间的距离是 ρ \rho ρ,则将
∂ φ ∂ l ∣ M 0 = lim ρ → 0 φ ( M ) − φ ( M 0 ) ρ = lim ρ → 0 φ ( x 0 + Δ x , y 0 + Δ y , z 0 + Δ z ) − φ ( x 0 , y 0 , z 0 ) ρ = lim ρ → 0 因变量变化量 长度变化量 \begin{align} \frac{\partial \varphi}{\partial l}{|}_{M_0} &= \underset{\rho\to 0}{\lim} \frac{\varphi(M)-\varphi(M_0)}{\rho} \\&= \underset{\rho\to 0}{\lim} \frac{\varphi(x_0 + \Delta x,y_0 + \Delta y,z_0 + \Delta z) - \varphi(x_0,y_0,z_0)}{\rho} \\&= \underset{\rho\to 0}{\lim} \frac{因变量变化量}{长度变化量} \end{align} ∂l∂φ∣M0=ρ→0limρφ(M)−φ(M0)=ρ→0limρφ(x0+Δx,y0+Δy,z0+Δz)−φ(x0,y0,z0)=ρ→0lim长度变化量因变量变化量
定义为函数 φ \varphi φ 在 M 0 M_0 M0 点沿 l ⃗ \vec{l} l 的方向导数。
直角坐标系下方向导数的计算:
若场(函数) φ = φ ( x , y , z ) \varphi=\varphi(x,y,z) φ=φ(x,y,z) 在点 M ( x , y , z ) M(x,y,z) M(x,y,z) 处可微, cos α \cos \alpha cosα、 cos β \cos \beta cosβ、 cos γ \cos \gamma cosγ 为方向 l ⃗ \vec{l} l 的方向余弦,则场在该点处沿该方向的方向导数必定存在,且为
∂ φ ∂ l ∣ M = ∂ φ ∂ x cos α + ∂ φ ∂ y cos β + ∂ φ ∂ z cos γ \frac{\partial \varphi}{\partial l}{|}_{M}= \frac{\partial \varphi}{\partial x}\cos \alpha + \frac{\partial \varphi}{\partial y}\cos \beta + \frac{\partial \varphi}{\partial z}\cos \gamma ∂l∂φ∣M=∂x∂φcosα+∂y∂φcosβ+∂z∂φcosγ
(2)标量场(函数)的梯度
定义:梯度是一个矢量,表示某一函数在该点处的方向导数沿着该方向取得最大值,即函数在该点处沿着该方向(此梯度的方向)变化最快,变化率最大(为该梯度的模)。
数学描述:
G ⃗ = g r a d φ = ∂ φ ∂ x e ⃗ x + ∂ φ ∂ y e ⃗ y + ∂ φ ∂ z e ⃗ z \begin{align} \vec{G} &= grad \, \varphi \\&= \frac{\partial \varphi}{\partial x}\vec{e}_x + \frac{\partial \varphi}{\partial y}\vec{e}_y + \frac{\partial \varphi}{\partial z}\vec{e}_z \end{align} G=gradφ=∂x∂φex+∂y∂φey+∂z∂φez
称为 φ \varphi φ 的梯度;
由于上述写法过于麻烦,引入哈密顿算符简化写法:
g r a d φ = ∂ φ ∂ x e ⃗ x + ∂ φ ∂ y e ⃗ y + ∂ φ ∂ z e ⃗ z = ( ∂ ∂ x e ⃗ x + ∂ ∂ y e ⃗ y + ∂ ∂ z e ⃗ z ) φ = ∇ φ ∇ = ∂ ∂ x e ⃗ x + ∂ ∂ y e ⃗ y + ∂ ∂ z e ⃗ z \begin{align} grad \, \varphi &= \frac{\partial \varphi}{\partial x}\vec{e}_x + \frac{\partial \varphi}{\partial y}\vec{e}_y + \frac{\partial \varphi}{\partial z}\vec{e}_z \\&= ( \frac{\partial}{\partial x}\vec{e}_x + \frac{\partial}{\partial y}\vec{e}_y + \frac{\partial}{\partial z}\vec{e}_z ) \, \varphi \\&= \nabla \varphi \\ \\ \nabla &= \frac{\partial}{\partial x}\vec{e}_x + \frac{\partial}{\partial y}\vec{e}_y + \frac{\partial}{\partial z}\vec{e}_z \end{align} gradφ∇=∂x∂φex+∂y∂φey+∂z∂φez=(∂x∂ex+∂y∂ey+∂z∂ez)φ=∇φ=∂x∂ex+∂y∂ey+∂z∂ez
梯度运算法则
设 c c c 为常数, u u u 和 v v v 为两个标量场(函数)
∇ c = 0 ∇ ( c u ) = c ∇ u ∇ ( u ± v ) = ∇ u ± ∇ v ∇ ( u v ) = v ∇ u + u ∇ v ∇ ( u v ) = 1 v 2 ( v ∇ u − u ∇ v ) ∇ [ f ( u ) ] = f ′ ( u ) ∇ u \begin{align} & \nabla c = 0 \\ & \nabla(cu) = c\nabla u \\ & \nabla(u\pm v) = \nabla u \pm \nabla v \\ & \nabla(u v) = v \nabla u + u \nabla v\\ & \nabla(\frac{u}{v}) = \frac{1}{v^2} (v \nabla u - u \nabla v)\\ & \nabla[f(u)] = f'(u)\nabla u \end{align} ∇c=0∇(cu)=c∇u∇(u±v)=∇u±∇v∇(uv)=v∇u+u∇v∇(vu)=v21(v∇u−u∇v)∇[f(u)]=f′(u)∇u
梯度计算
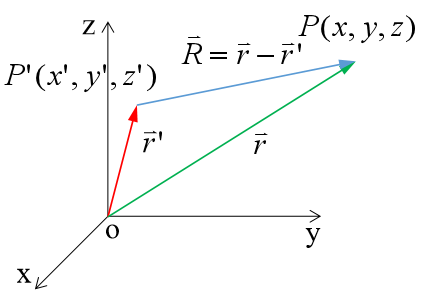
直角坐标系下的点 P ( x , y , z ) P(x,y,z) P(x,y,z) 与坐标原点确定的矢量为 r ⃗ \vec{r} r 与坐标原点之间的距离为 r r r,求 ∇ 1 r \nabla\frac{1}{r} ∇r1、 ∇ r \nabla{r} ∇r。
∇ 1 r = − r ⃗ 0 r 2 = − r ⃗ r 3 ∇ r = r ⃗ 0 \nabla\frac{1}{r} = -\frac{\vec{r}_0}{r^2}=-\frac{\vec{r}}{r^3} \\ \nabla r = \vec{r}_0 ∇r1=−r2r0=−r3r∇r=r0
矢量场(函数)的通量和散度
以矢量场 A ⃗ = A ⃗ ( x , y , z , t ) \vec{A}=\vec{A}(x,y,z,t) A=A(x,y,z,t) 为例;
通量的定义:
-
开曲面矢量场的通量:
ψ = ∫ s A ⃗ ⋅ d S ⃗ = ∫ s A ⃗ ⋅ n ⃗ d S \psi = \int_s\vec{A} \cdot d\vec{S} = \int_s\vec{A} \cdot \vec{n} d S ψ=∫sA⋅dS=∫sA⋅ndS -
闭曲面矢量场的通量:
ψ = ∮ s A ⃗ ⋅ d S ⃗ = ∮ s A ⃗ ⋅ n ⃗ d S \psi = \oint_s\vec{A} \cdot d\vec{S} = \oint_s\vec{A} \cdot \vec{n} d S ψ=∮sA⋅dS=∮sA⋅ndS
面方向的定义:
- 开曲面:满足右手螺旋的方向 n ⃗ \vec{n} n
- 闭曲面:朝外法线方向 n ⃗ \vec{n} n
通量的物理意义:
-
从定义式看出是点乘,结果是标量,仅有大小。按点乘几何意义的 A ⃗ \vec{A} A 要向 n ⃗ \vec{n} n 的方向投影,投影后就与面垂直。
-
对于封闭面,标量就要考虑大小的几种可能
ψ > 0 \psi>0 ψ>0:净通量流出,内部有源;
ψ < 0 \psi<0 ψ<0:净通量流入,内部有洞(负源);
ψ = 0 \psi=0 ψ=0:无源。对应无源场;
散度的定义
单位体积的通量,即通量密度为散度;
d i v A ⃗ = lim Δ V → 0 ∮ s A ⃗ ⋅ d S ⃗ Δ V = ∇ ⋅ A ⃗ = ( ∂ ∂ x e ⃗ x + ∂ ∂ y e ⃗ y + ∂ ∂ z e ⃗ z ) ⋅ ( A x e ⃗ x + A y e ⃗ y + A z e ⃗ z ) = ∂ A x ∂ x + ∂ A y ∂ y + ∂ A z ∂ z \begin{align} div\,\vec{A} &= \underset{\Delta V\to 0}{\lim} \frac{\oint_s\vec{A} \cdot d\vec{S}}{\Delta V} \\&= \nabla\cdot\vec{A} \\&= (\frac{\partial}{\partial x}\vec{e}_x + \frac{\partial}{\partial y}\vec{e}_y + \frac{\partial}{\partial z}\vec{e}_z) \cdot (A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z) \\&= \frac{\partial A_x}{\partial x} + \frac{\partial A_y}{\partial y} + \frac{\partial A_z}{\partial z} \end{align} divA=ΔV→0limΔV∮sA⋅dS=∇⋅A=(∂x∂ex+∂y∂ey+∂z∂ez)⋅(Axex+Ayey+Azez)=∂x∂Ax+∂y∂Ay+∂z∂Az
散度定理(高斯公式)
计算式等于定义式。
∇ ⋅ A ⃗ = lim Δ V → 0 ∮ s A ⃗ ⋅ d S ⃗ Δ V \begin{align} \nabla\cdot\vec{A} &= \underset{\Delta V\to 0}{\lim} \frac{\oint_s\vec{A} \cdot d\vec{S}}{\Delta V} \end{align} ∇⋅A=ΔV→0limΔV∮sA⋅dS
右边的 Δ V \Delta V ΔV 和极限符号移到左边,并对左边体积分得到
∫ V ∇ ⋅ A ⃗ d V = ∮ s A ⃗ ⋅ d S ⃗ \begin{align} \int_V \nabla \cdot \vec{A} \,dV &= {\oint_s\vec{A} \cdot d\vec{S}} \end{align} ∫V∇⋅AdV=∮sA⋅dS
提示:
- 积分方程组和微分方程组的互化纽带;
- 右边是矢量场的闭曲面的面积分(通量),左边是该闭曲面围成的体积的矢量场散度的体积分;
- 闭曲面的面积分,与该闭曲面围成的体积的体积分互化关系;
- 给出了通量的一种计算方法,即使用散度的体积分获得;
矢量场(函数)的环量和旋度
环量的定义
ψ = ∮ s A ⃗ ⋅ d l ⃗ = ∮ s A cos θ d l \psi = \oint_s\vec{A} \cdot d\vec{l} = \oint_s A \cos\theta \,dl ψ=∮sA⋅dl=∮sAcosθdl
环量的物理意义
- 从定义式看出是点乘,结果是标量,仅有大小。按点乘几何意义的 A ⃗ \vec{A} A 要向 l ⃗ \vec{l} l 的方向投影,投影后就与面垂直,即垂直于 n ⃗ \vec{n} n 。
- 对于封闭曲线,标量就要考虑大小的几种可能
ψ ≠ 0 \psi \ne 0 ψ=0 :封闭曲线内有涡旋源没有做大于或小于零区分;
ψ = 0 \psi = 0 ψ=0 :无旋。对应无旋场;(静电场是无旋场)
环量密度定义
单位面积的环量,即环量面密度:
lim Δ V → 0 ∮ c A ⃗ ⋅ d l ⃗ Δ S \begin{align} \underset{\Delta V\to 0}{\lim} \frac{\oint_c\vec{A} \cdot d\vec{l}}{\Delta S} \end{align} ΔV→0limΔS∮cA⋅dl
旋度的定义
环量面密度的最大值;
r o t A ⃗ = n ⃗ lim Δ S → 0 ∣ ∮ c A ⃗ ⋅ d l ⃗ ∣ m a x Δ S = ∇ × A ⃗ = ( ∂ ∂ x e ⃗ x + ∂ ∂ y e ⃗ y + ∂ ∂ z e ⃗ z ) × ( A x e ⃗ x + A y e ⃗ y + A z e ⃗ z ) = ∣ e ⃗ x e ⃗ y e ⃗ z ∂ ∂ x ∂ ∂ y ∂ ∂ z A x A y A z ∣ = ( ∂ A z ∂ y − ∂ A y ∂ z ) e ⃗ x + ( ∂ A x ∂ z − ∂ A z ∂ x ) e ⃗ y + ( ∂ A y ∂ x − ∂ A x ∂ y ) e ⃗ z \begin{align} rot\,\vec{A} &= \vec{n} \underset{\Delta S\to 0}{\lim} \frac{{|\oint_c\vec{A} \cdot d\vec{l}|}_{max}} {\Delta S} \\&= \nabla \times \vec{A} \\&= (\frac{\partial}{\partial x}\vec{e}_x + \frac{\partial}{\partial y}\vec{e}_y + \frac{\partial}{\partial z}\vec{e}_z ) \times (A_x\vec{e}_x + A_y\vec{e}_y + A_z\vec{e}_z) \\&= \begin{vmatrix} \vec{e}_x & \vec{e}_y & \vec{e}_z \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ A_x & A_y & A_z \end{vmatrix}\\&= (\frac{\partial A_z}{\partial y} - \frac{\partial A_y}{\partial z})\vec{e}_x + (\frac{\partial A_x}{\partial z} - \frac{\partial A_z}{\partial x})\vec{e}_y + (\frac{\partial A_y}{\partial x} - \frac{\partial A_x}{\partial y})\vec{e}_z \end{align} rotA=nΔS→0limΔS∣∮cA⋅dl∣max=∇×A=(∂x∂ex+∂y∂ey+∂z∂ez)×(Axex+Ayey+Azez)= ex∂x∂Axey∂y∂Ayez∂z∂Az =(∂y∂Az−∂z∂Ay)ex+(∂z∂Ax−∂x∂Az)ey+(∂x∂Ay−∂y∂Ax)ez
旋度定理(斯托克斯定理)
计算式=定义式。
∇ × A ⃗ = n ⃗ lim Δ S → 0 ∣ ∮ c A ⃗ ⋅ d l ⃗ ∣ m a x Δ S \begin{align} \nabla \times \vec{A} &= \vec{n} \underset{\Delta S\to 0}{\lim} \frac{{|\oint_c\vec{A} \cdot d\vec{l}|}_{max}} {\Delta S} \\ \end{align} ∇×A=nΔS→0limΔS∣∮cA⋅dl∣max
右边的 Δ S \Delta S ΔS 和极限符号移到左边,并对左边面积分得到
∫ s ∇ × A ⃗ ⋅ d S ⃗ = ∮ c A ⃗ ⋅ d l ⃗ \int_s \nabla \times \vec{A} \cdot d\vec{S} =\oint_c\vec{A} \cdot d\vec{l} ∫s∇×A⋅dS=∮cA⋅dl
提示:
- 积分方程组和微分方程组的互化纽带;
- 右边是矢量场的闭曲线的线积分(环量),左边是该闭曲面围成的面积的矢量场旋度的面积分;
- 闭曲线的线积分,与该闭曲线围成的面积的面积分互化关系;
- 给出了环量的一种计算方法,即使用旋度的面积分获得;
两个重要恒等式
-
标量场的梯度的旋度恒等于0矢量
∇ × ( ∇ φ ) = 0 ⃗ \nabla \times (\nabla \varphi) = \vec{0} ∇×(∇φ)=0 -
矢量场的旋度的散度恒等于0标量
∇ ⋅ ( ∇ × A ⃗ ) = 0 ⃗ \nabla \cdot (\nabla \times \vec{A}) = \vec{0} ∇⋅(∇×A)=0
1.4 亥姆霍兹定理
亥姆霍兹定理:矢量场 F ⃗ \vec{F} F 在无限空间中处处单值,且其导数连续有界,而源分布在有限空间区域中,则矢量场由其散度和旋度唯一确定,并且表示为两个矢量场之和 F ⃗ = F ⃗ 1 + F ⃗ 2 \vec{F}=\vec{F}_1+\vec{F}_2 F=F1+F2 ,其中 为 F ⃗ 1 \vec{F}_1 F1 一个标量场 φ \varphi φ 的负梯度, F ⃗ 2 \vec{F}_2 F2 为一个矢量场 A ⃗ \vec{A} A 的旋度。
提示:负梯度中的负号是人为引入,在后面会看到,标量场 φ \varphi φ 表示电位,而一般是选取无限远处电位为零。
数学公式表述:
F ⃗ = F ⃗ 1 + F ⃗ 2 F ⃗ 1 = − ∇ φ F ⃗ 2 = ∇ × A ⃗ F ⃗ = − ∇ φ + ∇ × A ⃗ \begin{align} &\vec{F} = \vec{F}_1 + \vec{F}_2 \\ &\vec{F}_1 = -\nabla \varphi \\ &\vec{F}_2 = \nabla \times \vec{A} \\ &\vec{F} = -\nabla \varphi + \nabla \times \vec{A} \\ \end{align} F=F1+F2F1=−∇φF2=∇×AF=−∇φ+∇×A
分解后的意义:
-
研究矢量场 F ⃗ \vec{F} F 转去研究矢量场的分量 F ⃗ 1 \vec{F}_1 F1 和 F ⃗ 2 \vec{F}_2 F2,进一步要研究标量场 φ \varphi φ 和矢量场 A ⃗ \vec{A} A,在后面时变电磁场会看到和有一定的关系,而只需研究一个即可。
-
分解后两个矢量场的特点:
∇ × F ⃗ 1 = − ∇ × ( ∇ φ ) = 0 ⃗ ∇ ⋅ F ⃗ 2 = ∇ ⋅ ( ∇ × A ⃗ ) = 0 \begin{align} \nabla \times\vec{F}_1 &= - \nabla \times (\nabla\varphi )\\ &=\vec{0} \\\\ \nabla\cdot\vec{F}_2 &= \nabla \cdot (\nabla \times \vec{A}) \\ &={0} \end{align} ∇×F1∇⋅F2=−∇×(∇φ)=0=∇⋅(∇×A)=0
说明分解后的场一个是无旋场,一个是无源场。
矢量场由其散度和旋度唯一确定
F ⃗ = F ⃗ 1 + F ⃗ 2 { ∇ ⋅ F ⃗ = ∇ ⋅ F ⃗ 1 + ∇ ⋅ F ⃗ 2 = ∇ ⋅ F ⃗ 2 = 0 ∇ ⋅ F ⃗ 1 = 令 ρ ε ∇ × F ⃗ = ∇ × F ⃗ 1 + ∇ × F ⃗ 2 = ∇ × F ⃗ 1 = 0 ∇ × F ⃗ 2 = 令 0 ⃗ \begin{align} &\,\,\,\,\,\vec{F} = \vec{F}_1 + \vec{F}_2 \\ &\begin{cases} \nabla\cdot\vec{F} &= \nabla\cdot\vec{F}_1 &+ \nabla\cdot\vec{F}_2 \, &{\xlongequal{\nabla\cdot\vec{F}_2 =0}} &\nabla\cdot\vec{F}_1 &\xlongequal{令} \frac{\rho}{\varepsilon} \\ \nabla \times \vec{F} &= \nabla \times \vec{F}_1 &+ \nabla \times \vec{F}_2 \, &{\xlongequal{\nabla \times \vec{F}_1 = 0}} &\nabla \times \vec{F}_2 &\xlongequal{令} \vec{0} \end{cases} \\ \\ \end{align} F=F1+F2{∇⋅F∇×F=∇⋅F1=∇×F1+∇⋅F2+∇×F2∇⋅F2=0∇×F1=0∇⋅F1∇×F2令ερ令0
则有
{ ∇ ⋅ F ⃗ = ρ ε ∇ × F ⃗ = 0 ⃗ \begin{cases} \nabla \cdot \vec{F} &= \frac{\rho}{\varepsilon} \\ \nabla \times \vec{F} &= \vec{0} \end{cases} {∇⋅F∇×F=ερ=0
使用静电场代替矢量场 E ⃗ → F ⃗ \vec{E}\to\vec{F} E→F ,则可得到静电场的场方程
{ ∇ ⋅ E ⃗ = ρ ε ∇ × E ⃗ = 0 ⃗ \begin{cases} \nabla \cdot \vec{E} &= \frac{\rho}{\varepsilon} \\ \nabla \times \vec{E} &= \vec{0} \end{cases} {∇⋅E∇×E=ερ=0
在直角坐标系下具体化展开
{ ∂ ∂ x e ⃗ x + ∂ ∂ y e ⃗ y + ∂ ∂ z e ⃗ z ) ⋅ ( E x e ⃗ x + E y e ⃗ y + E z e ⃗ z ) = ρ ε ∣ e ⃗ x e ⃗ y e ⃗ z ∂ ∂ x ∂ ∂ y ∂ ∂ z E x E y E z ∣ = 0 ⃗ \begin{align} \begin{cases} \frac{\partial}{\partial x}\vec{e}_x + \frac{\partial}{\partial y}\vec{e}_y + \frac{\partial}{\partial z}\vec{e}_z ) \cdot (E_x\vec{e}_x + E_y\vec{e}_y + E_z\vec{e}_z) = \frac{\rho}{\varepsilon} \\ \\ \begin{vmatrix} \vec{e}_x & \vec{e}_y & \vec{e}_z \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ E_x & E_y & E_z \end{vmatrix} = \vec{0} \end{cases} \end{align} ⎩ ⎨ ⎧∂x∂ex+∂y∂ey+∂z∂ez)⋅(Exex+Eyey+Ezez)=ερ ex∂x∂Exey∂y∂Eyez∂z∂Ez =0
{ ∂ E x ∂ x + ∂ E y ∂ y + ∂ E z ∂ z = ρ ε ( ∂ E z ∂ y − ∂ E y ∂ z ) e ⃗ x + ( ∂ E x ∂ z − ∂ E z ∂ x ) e ⃗ y + ( ∂ E y ∂ x − ∂ E x ∂ y ) e ⃗ z = 0 ⃗ \begin{cases} \frac{\partial E_x}{\partial x} + \frac{\partial E_y}{\partial y} + \frac{\partial E_z}{\partial z} = \frac{\rho}{\varepsilon} \\ \\ (\frac{\partial E_z}{\partial y} - \frac{\partial E_y}{\partial z})\vec{e}_x + (\frac{\partial E_x}{\partial z} - \frac{\partial E_z}{\partial x})\vec{e}_y + (\frac{\partial E_y}{\partial x} - \frac{\partial E_x}{\partial y})\vec{e}_z = \vec{0} \end{cases} ⎩ ⎨ ⎧∂x∂Ex+∂y∂Ey+∂z∂Ez=ερ(∂y∂Ez−∂z∂Ey)ex+(∂z∂Ex−∂x∂Ez)ey+(∂x∂Ey−∂y∂Ex)ez=0
解出三个分量,得到矢量场,尤其散度和旋度唯一确定。
1.5 三种坐标系
1.5.1 直角坐标系
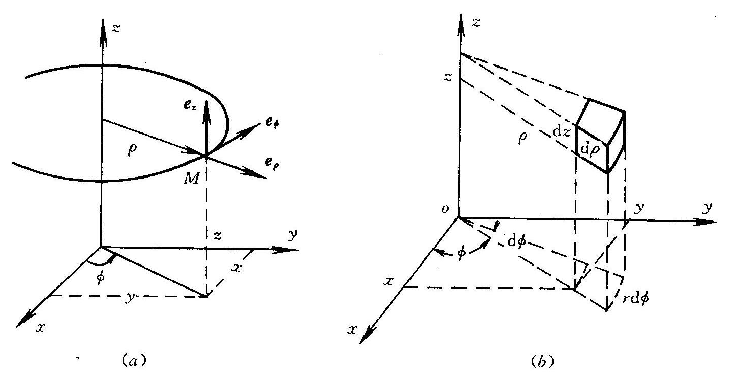
1.5.2 柱坐标系
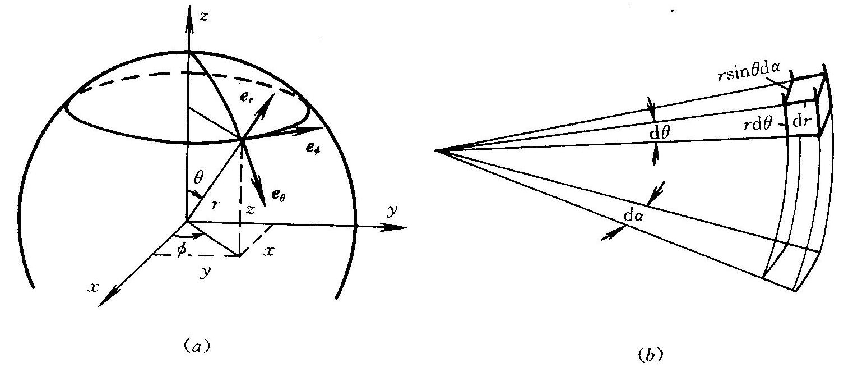
1.5.3 球坐标系
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!