【基础】自动驾驶控制算法第三讲 轮胎侧偏与车辆动力学方程
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、为啥不用运动学方程?
- 动力学方程
- 纵向控制
- 横向控制
- 二自由度动力学方程
- 假设
- 轮胎的侧偏特性(一种清新脱俗的解释)
- 自行车模型推导
- 总结
前言
信息来源于B站 忠厚老实的老王,侵删。
提示:以下是本篇文章正文内容,下面案例可供参考
一、为啥不用运动学方程?
- 简化太多
- 非线性方程
- 纵向速度和方向盘转角耦合
用途: 坐标变换(注意这里忽略了侧偏角的速度)()
动力学方程
- 考虑了轮胎的特性
- 商业化的自动驾驶算法都是以动力学方程为基础
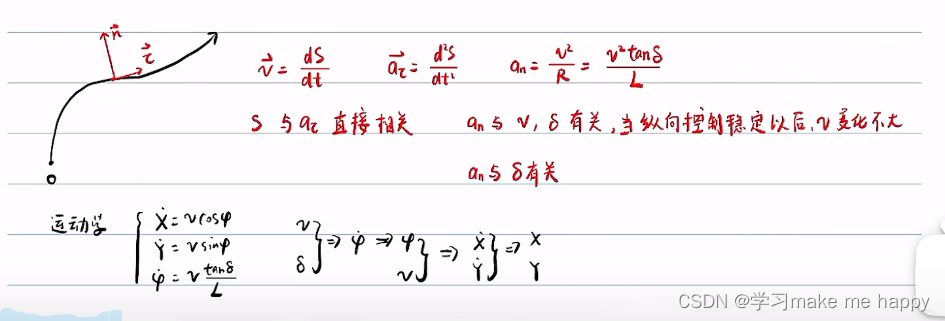
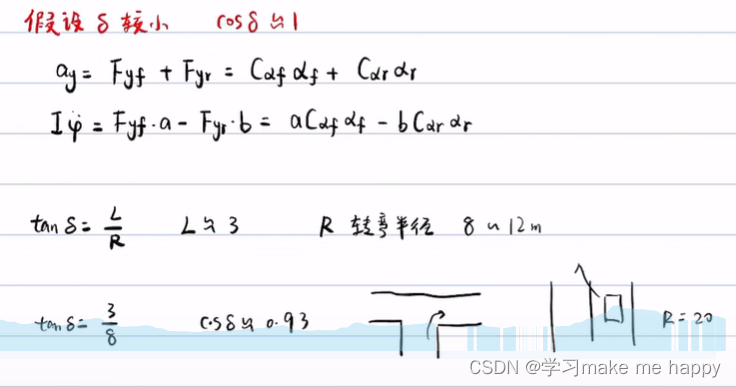
- 关于an,使用了运动学得到的公式,相对于横摆角,侧偏角变化率比较小,这个情况适用于高速,所以可以用这个公式。
- 但,tan(delta)这个公式没有考虑轮胎的侧偏特性,所以这个模型用来做高速运动控制不够(有时间再吸收一下)
- 图片红字部分说明的是横纵向的解耦。说白了,一个负责改变速度的大小,一个负责改变速度的方向。
- 黑子部分介绍了运动学模型中的耦合。
纵向控制
横向控制
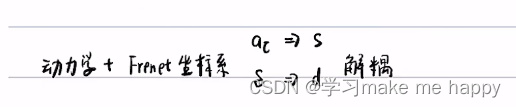
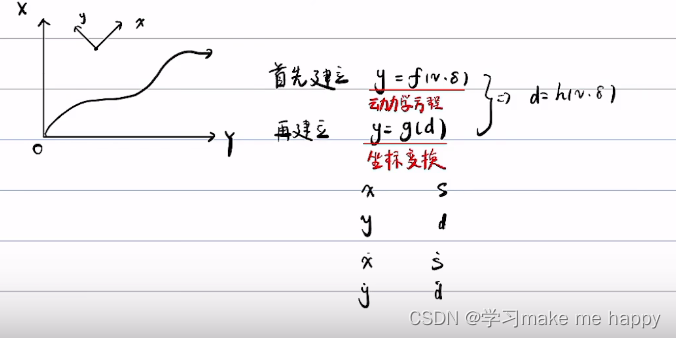
求解思路:
二自由度动力学方程
假设
- 前轮转角比较小
- vx(车辆坐标系下)是常数
轮胎的侧偏特性(一种清新脱俗的解释)
下图讲的是轮胎侧偏的等效

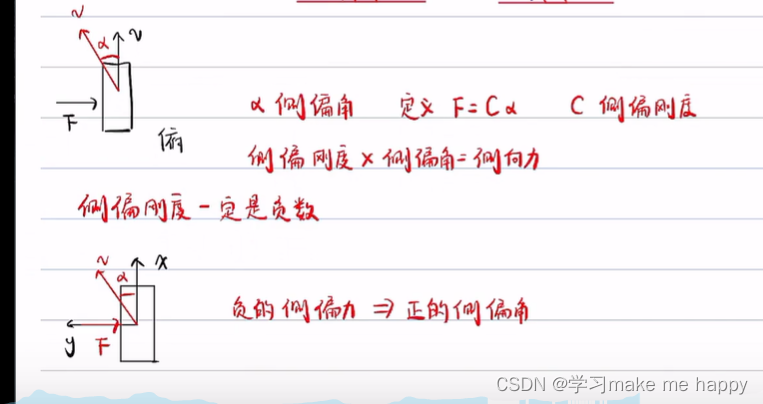
上图适用于非极限工况。
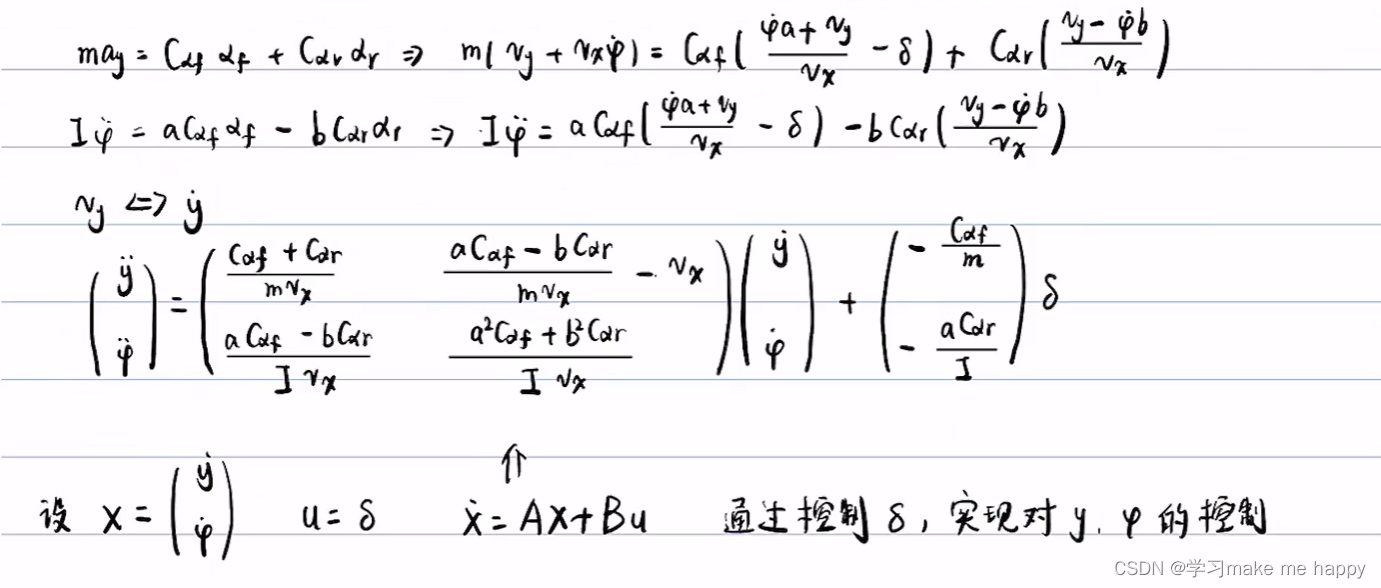
自行车模型推导
下图中up猪漏了一项,自己找一下吧。
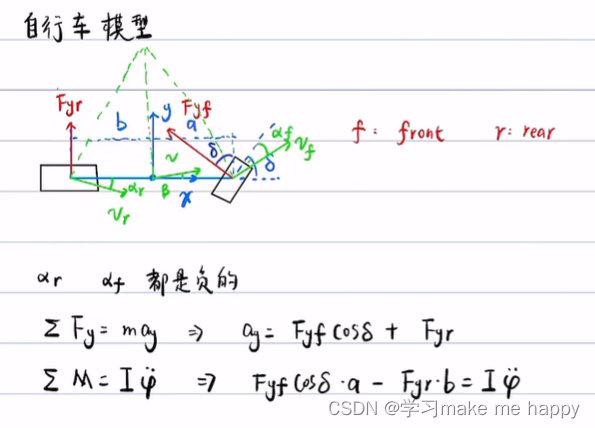
下面做了一个重要的假设。
然而,我们并不满足于此,我们需要下面的关系。

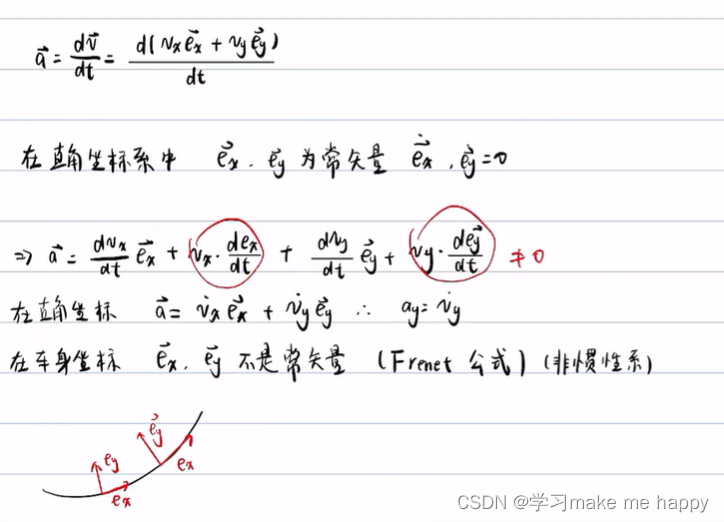
下面是dotdotay带小尾巴的解释
下面是求侧偏角的过程,利用的也是理论力学的知识。
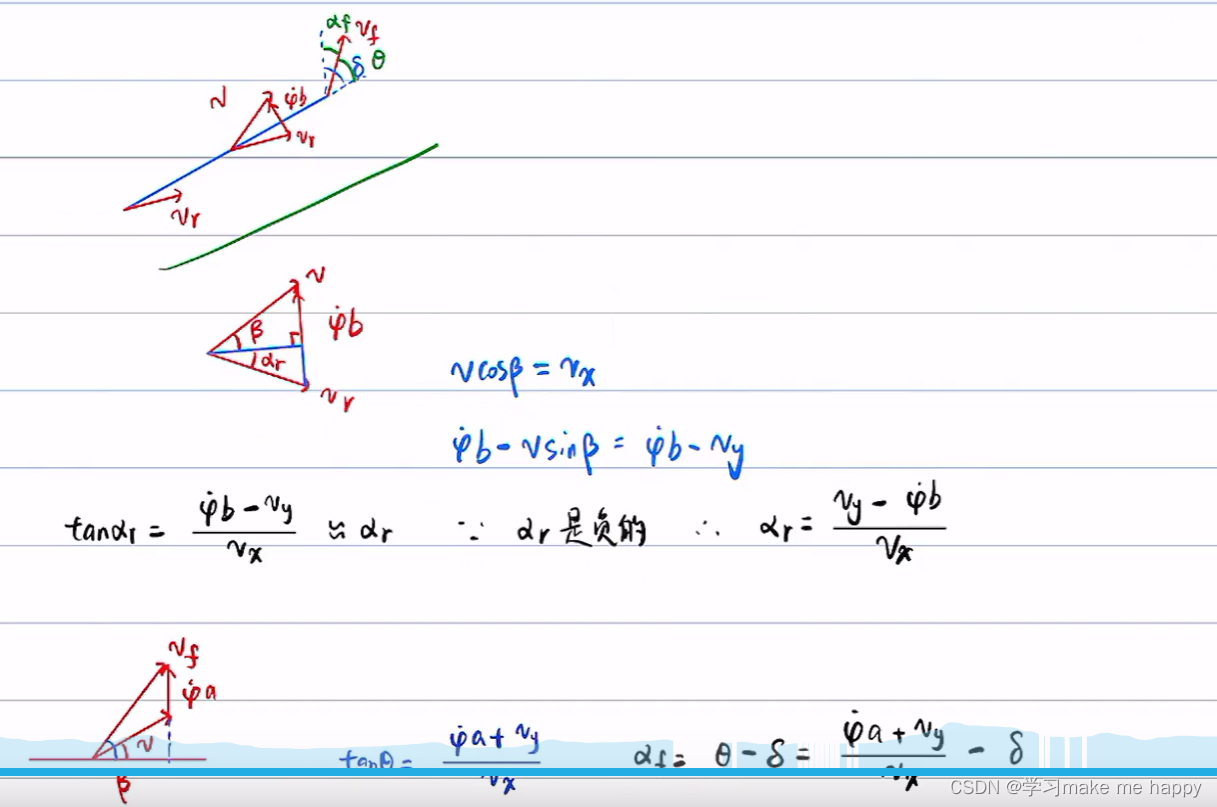
推导出来的动力学模型
总结
感谢老王。
本课中还有一些知识点需要消化吸收。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!