apm装机教程(一):无人车
文章目录
- 前言
- 一、下载固件
- 二、设置参数
前言
APM4.2.3
差速小车
pix2.4.8
MP地面站
开源无人船自主避障演示
一、下载固件
pix2.4.8使用的是fmuv3的固件,可以在官网上下载
https://firmware.ardupilot.org/Rover/stable-4.2.3/fmuv3/
或者从我的网盘下载
链接:https://pan.baidu.com/s/1RyCvu4QjBkV5bzN_4PUIMw?pwd=4q38
提取码:4q38
–来自百度网盘超级会员V6的分享
下载完后,打开MP地面站
把飞控插到电脑,但不要链接到地面站。进入地面站下面的页面:
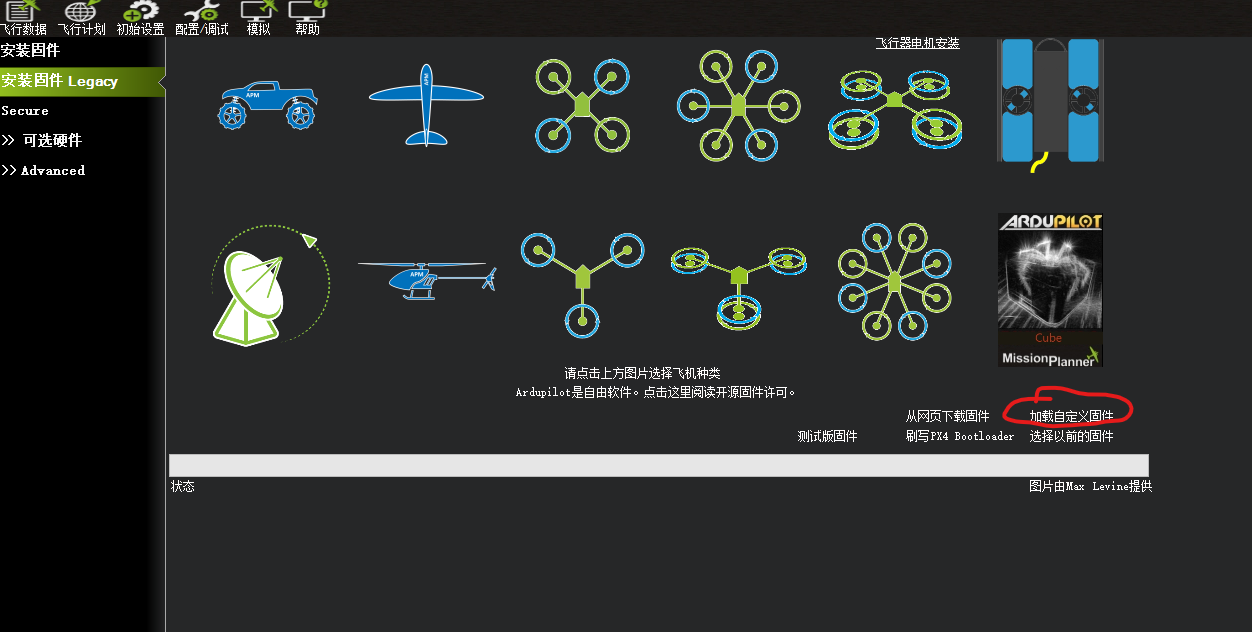
点击加载自定义固件,选择下载的apj文件,会自动下载固件
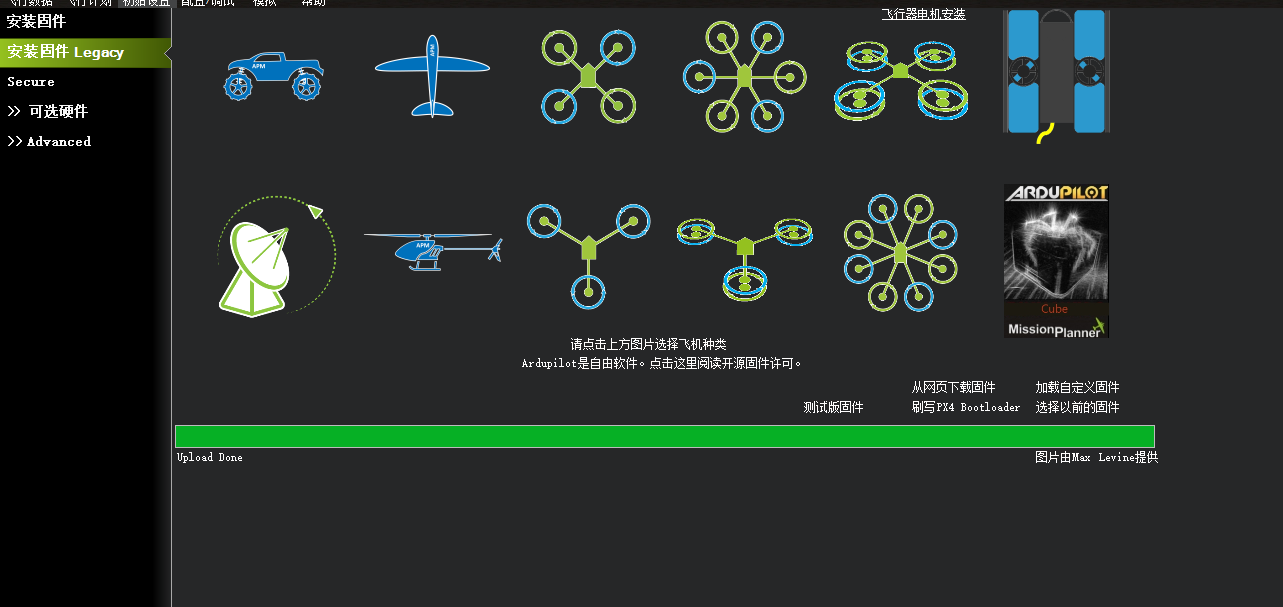
如果下载时提示没有找到端口,可以检查飞控USB端口是否被其他软件占用
二、设置参数
下载完固件后,就是校准传感器,这些不赘述。
需要注意的是,固件默认的车型是电机加舵转向的,而我这里使用的是差速小车,所以需要修改下面的通道的参数:通道1设置成ThrottleLeft,通道2设置成ThrottleRight,然后将电调分别接到飞控的通道就可以了

跑航线的参数可以在下图页面设置

本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!