机器人轨迹追踪控制方法
轨迹追踪控制方法
注:知识来源于哈工大《机器人力控》线上课程,网址:https://www.bilibili.com/video/BV1y7411H7fg?p=1
运动控制方程
Q = M ( q ) q ¨ + C ( q , q ˙ ) + B q ˙ + D ( q ˙ ) + G ( q ) (1) Q=M(q)\ddot q+C(q,\dot q)+B\dot q+D(\dot q)+G(q) \tag{1} Q=M(q)q¨+C(q,q˙)+Bq˙+D(q˙)+G(q)(1)
对于期望的机器人运动,需要各个关节运动的广义力 Q Q Q
理论上,只需要计算出所需要的驱动力,然后由驱动部件产生这样的驱动力便可以完成轨迹控制 → \rightarrow → 实际世界中,运动参数难以无误差的得到。
广义驱动力 Q Q Q 的线性化近似
Q ≈ G ( q ) + k p ( q d − q ) + k d ( q ˙ d − q ˙ ) + ∑ j = 2 N [ k j ( d ( j ) q d d t ( j ) − d ( j ) q d t ( j ) ) ] (2) Q\approx G(q)+k_p(q_d-q)+k_d(\dot q_d-\dot q)+\sum_{j=2}^N[k_j(\frac{d^{(j)}q_d}{dt^{(j)}}-\frac{d^{(j)}q}{dt^{(j)}})] \tag{2} Q≈G(q)+kp(qd−q)+kd(q˙d−q˙)+j=2∑N[kj(dt(j)d(j)qd−dt(j)d(j)q)](2)
方法类似于泰勒展开,其中 q d q_d qd 为期望的位置矢量。
对二阶以上的导数用积分项加以近似,有:
Q ≈ G ( q ) + k p ( q d − q ) + k d ( q ˙ d − q ˙ ) + k i ∫ 0 t ( q d − q ) d t (3) Q\approx G(q)+k_p(q_d-q)+k_d(\dot q_d-\dot q)+k_i\int_0^t(q_d-q)dt \tag{3} Q≈G(q)+kp(qd−q)+kd(q˙d−q˙)+ki∫0t(qd−q)dt(3)
PD控制器:
对于回转关节型机器人,可以简化为:
τ d ≈ G ( q ) + k p ( θ d − q ) + k d ( θ ˙ d − q ˙ ) (4) \tau_d\approx G(q)+k_p(\theta_d-q)+k_d(\dot \theta_d-\dot q) \tag{4} τd≈G(q)+kp(θd−q)+kd(θ˙d−q˙)(4)
而 θ d \theta_d θd 可以被视为常数,而且 τ d \tau_d τd 是理论驱动力矩,难以精确得到,进一步简化:
τ d = − k p ( θ − θ d ) − k d θ ˙ d + G ( q ) (5) \tau_d=-k_p(\theta-\theta_d)-k_d\dot \theta_d+G(q) \tag{5} τd=−kp(θ−θd)−kdθ˙d+G(q)(5)
动态控制
C ( q , q ˙ ) → C(q,\dot q)\rightarrow C(q,q˙)→ 离心力、科氏力在低速运动种比较小,在线性化后的误差视为扰动。
在高速运动中,该误差难以通过PID控制消除。拟采用动态控制。
动态控制:通过运动学方程得到这些非线性项( C ( q , q ˙ ) C(q,\dot q) C(q,q˙))的数值,再将这些数值作为前馈或反馈。
前馈动态控制
逆动力学问题:基于参数推定值实现给定运动所需的力矩
τ I D ( q , q ˙ , q ¨ ) = M ^ ( q ) q ¨ + C ^ ( q , q ˙ ) + B ^ q ˙ + D ^ ( q ˙ ) + G ^ ( q ) (6) \tau_{ID}(q,\dot q,\ddot q)=\hat M(q)\ddot q+\hat C(q,\dot q)+\hat B\dot q+\hat D(\dot q)+\hat G(q) \tag{6} τID(q,q˙,q¨)=M^(q)q¨+C^(q,q˙)+B^q˙+D^(q˙)+G^(q)(6)
其中,拥有^的参数表示为实验测定值。
控制方法:用 τ I D \tau_{ID} τID 替代 τ \tau τ
不足:模型误差、扰动的存在;一旦轨迹稍有偏差,计算力矩与实际所需力矩会有偏差,从而产生更大的轨迹误差。
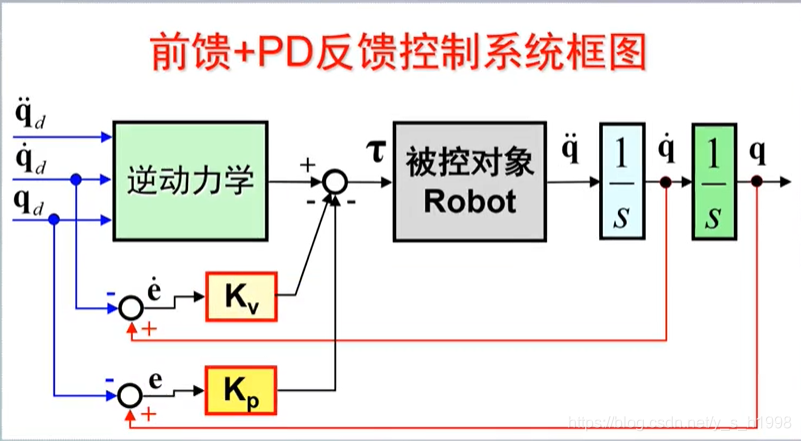
前馈+PD反馈控制
基本思想:由PD控制器控制由前馈控制得到的线性近似系统。抑制住轨迹误差和模型误差。
控制律:
τ = τ I D ( q d , q ˙ d , q ¨ d ) − K v e ˙ − K p e (7) \tau=\tau_{ID}(q_d,\dot q_d,\ddot q_d)-K_v\dot e-K_pe \tag{7} τ=τID(qd,q˙d,q¨d)−Kve˙−Kpe(7)
计算力矩控制法
基本思想:用关节位置、速度的反馈值和期望值来估算关节加速度值。再用逆动力学求解得到所需驱动力。
τ = τ I D ( q , q ˙ , q ¨ ∗ ) q ¨ ∗ = q ¨ d − K v e ˙ − K p e (8) \tau=\tau_{ID}(q,\dot q,\ddot q^*)\\ \ddot q^*=\ddot q_d-K_v\dot e-K_pe \tag{8} τ=τID(q,q˙,q¨∗)q¨∗=q¨d−Kve˙−Kpe(8)
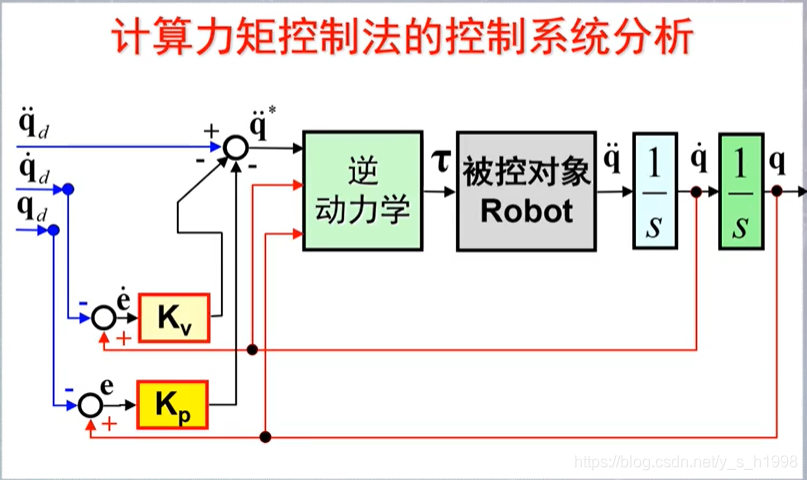
说明:逆动力学求解需要实时进行;可以适当对逆动力学方程简化,以提高计算效率;
前馈+PD反馈和计算力矩两种方法比较
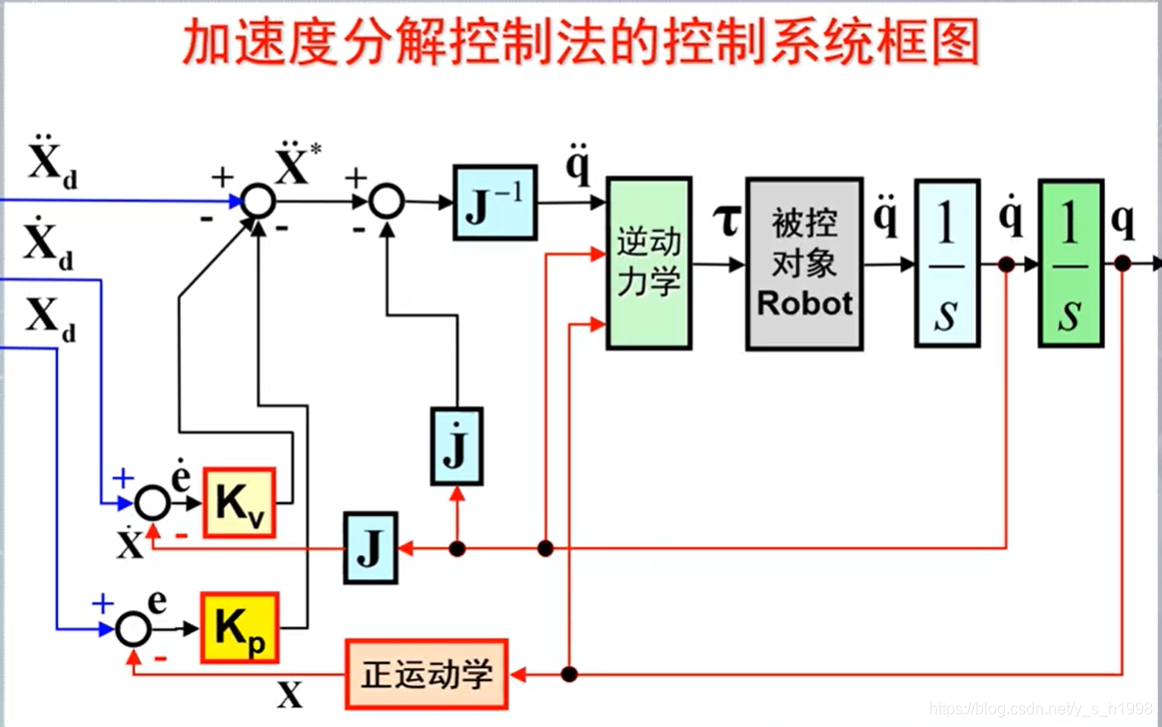
加速度分解控制法
控制思想:用关节位置、速度的反馈值和运动期望估算末端操作器的加速度值,进而得到关节加速度值,与关节速度、位置进行逆动力学计算得到驱动力。
q ¨ ∗ = J − 1 { X ¨ d + K v ( X ˙ d − X ˙ ) + K p ( X d − X ) − J ˙ q ˙ } (9) \ddot q^*=J^{-1}\lbrace \ddot X_d+K_v(\dot X_d-\dot X)+K_p(X_d-X)-\dot J\dot q \rbrace \tag{9} q¨∗=J−1{X¨d+Kv(X˙d−X˙)+Kp(Xd−X)−J˙q˙}(9)
注: X ¨ = J q ¨ + J ˙ q ˙ \ddot X=J\ddot q+\dot J\dot q X¨=Jq¨+J˙q˙
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!