【分享NVIDIA GTC技术干货】Introduction to Autonomous Vehicles [S51168]
2023年3月20号,由NVIDIA主持,由NVIDIA 的汽车内容营销经理凯蒂·瓦沙博主讲的自动驾驶汽车简介,我有幸与会聆听。身为一名智能交通系的大三学生,我深有体会,一方面感慨自动驾驶的强大,另一方面也赞叹人类的智慧。
一、自动驾驶的分级
近年来,自动驾驶技术取得了巨大的进展和突破,成为了当前社会最热门的话题之一,对于企业和高校来说都是一个风口。我们专业也学习了许多自动驾驶相关的知识。自动驾驶技术的发展受益于计算机技术和机器学习算法的迅猛发展,以及传感器和通讯技术的不断提升。这些技术的融合和协同作用,使得自动驾驶技术的可行性和可靠性不断提升。
讲座中,凯蒂·瓦沙博女士将自动驾驶汽车的发展主要分为以下几个阶段:
1.无自动化(Level 1):驾驶员执行所有驾驶任务
2.驾驶员辅助(Level 2),车辆具有特定功能的辅助自动化
3.条件自动化(Level 3),车辆可以监控和响应其环境
4.高度自动化(Level 4),车辆在一定条件下可以执行所有的驾驶功能
5.全自动化(Level 5),车辆可在任何条件下执行所有驾驶功能

其实,关于自动驾驶的分级,由许多的分类方法,以上只是其中的一种。下面介绍另一种我国比较常见的分级方式:0级驾驶自动化(应急辅助,Emergency Assistance)系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力。1 级驾驶自动化(部分驾驶辅助,Partial Driver Assistance)系统在其设计运行条件下持续地执行动 态驾驶任务中的车辆横向或纵向运动控制,且具备 与所执行的车辆横向或纵向运动控制相适应的部分 目标和事件探测与响应的能力。2级驾驶自动化(组合驾驶辅助,Combined Driver Assistance)系统在其设计运行条件下持续地执行动态驾驶任务中的车辆横向和纵向运动控制, 且具备 与所执行的车辆横向和纵向运动控制相适应的部分目标和事件探测与响应的能力。3级驾驶自动化(有条件自动驾驶,Conditionally Automated Driving)系统在其设计运行条件下持续地 执行全部动态驾驶任务。4级驾驶自动化(高度自动驾驶,Highly Automated Driving) 系统在其设计运行条件下持续地执行全部 动态驾驶任务并自动执行最小风险策略。 5 级驾驶自动化(完全自动驾驶,Fully Automated Driving) 系统在任何可行驶条件下持续地执行全部 动态驾驶任务并自动执行最小风险策略。
其实,两者都是将自动驾驶功能从低级到高级排列,目前我们尚未达到最高级别,大多企业都处于L3和L4,达到完全的无人驾驶还有很长一段路要走。
二、自动驾驶早期发展
在讲座中,凯蒂·瓦沙博女士介绍了DARPA 城市挑战赛。2007年,美国国防高级研究计划局(DARPA)举办了一项名为“城市挑战赛”的比赛。这是一项旨在促进自主驾驶车辆技术发展的赛事,参赛车辆需要在模拟城市环境中自主驾驶,完成规定的任务。比赛的参赛车辆需要在模拟城市环境中自主驾驶,完成从起点到终点的任务。比赛场地是一个模拟城市,包括城市街道、交通信号灯、路障等。参赛车辆需要识别并避让其他车辆、行人和路障,并在不同的路段遵守交通规则,如减速、停车、加速等。
其实,当时几乎所有的车辆都未能完成全部任务,可以说对于这场比赛来说是失败的。但也有意外的事情出现。比赛受到了大量的关注。正是因为这个比赛,吸引了以Google为代表的全世界ICT公司和硅谷创业公司加入到智能汽车的研发中来,由此也引起了传统汽车产业“智能化”的变革,诞生了一个上万亿的产业。也可以这样说,这项比赛促进了自主驾驶车辆技术的发展,并推动了人工智能、计算机视觉和机器学习等领域的研究。在一定程度上,大大地推动了自动驾驶产业的飞速发展。

三、人工智能在汽车驾驶领域的应用
近年来,随着社会经济的发展和科技的进步, 人类已进入科技社会,人工智能技术引起了人们的高度关注,为自动驾驶带来了巨大的生命力,被广泛应用到交通领域。在汽车驾驶领域应用人工智能技术可在为人们 带来便利的同时,增加人们出行的舒适度,还可有效降低交通事故的发生率。人工智能是自动驾驶的解决方案。
如,利用人工智能,可以全面的感知汽车周围的情况,对车体进行360度 “无死角”监测,以保证驾驶员能掌控每个方向每个角落,有利于驾驶员快速做出正确的判断,从而降低道路风险,确保行车安全。 另外,可利用人工智能,借助红外线、 双目、单目摄像头,精准识别车道线、交通信号灯、 过往车辆、行人等,提示驾驶员确保汽车行驶安全。利用CNN、DNN等深度学习网络,实现海量数据覆盖,训练模型,让自动驾驶汽车“知道”在道路上可能发生的一切意外。
四、NVIDIA自动驾驶开发
据介绍,目前NVIDIA具备了开发自动驾驶汽车的能力,能够为自动驾驶汽车提供非常优秀的解决方案。目前基于场景库的仿真测试是解决自动驾驶路测数据匮乏的重要路线。仿真测试主要通过构建虚拟场景库,实现自动驾驶感知、决策规划、控制等算法的闭环仿真测试,满足自动驾驶测试的要求。场景库是自动驾驶仿真测试的基础,场景库对现实世界的覆盖率越高,仿真测试结果越真实。而且自动驾驶汽车研发的不同阶段对于场景库的要求也不同,需要场景库实现不同的测试功能。
自然驾驶场景来源于汽车真实的自然驾驶状态,是构建自动驾驶测试场景中最基础的数据来源。由于自然驾驶场景包含自动驾驶汽车所处的人- 车- 环境- 任务等全方位信息,如车辆数据、驾驶人行为、道路环境等多维度信息,能够很好地体现测试的随机性、复杂性、典型性区域特点,属于自动驾驶汽车充分测试的场景,目的是为了满足自动驾驶汽车最基本的功能开发与验证。
基于NVIDIAD RIVESim神经重构引擎的增压AV仿真,具有集中式人工智能计算能力,可处理来自车辆传感器的数据,同时运行各种深度神经网络,拥有能力感知、本地化、映射、规划和控制的能力,具有十分强大的可扩展性、高性能和高能效。同时,具备冗余多样的传感器,如摄像机、可接受的账目数据登录及修复系统、激光雷达、超声波、全球导航卫星系统(即GPS)。
据了解,在仿真场景中,普通场景下的自动驾驶算法已经比较完善,突破难点在于一些极端场景(corner cases)。由于极端场景在现实中可遇不可求,利用仿真平台可以便捷生成,所以业界共识是加大仿真测试在自动驾驶测试中的占比。目前自动驾驶算法测试大约90% 通过仿真平台完成,9% 在测试场完成,1% 通过实际路测完成。仿真测试结果可以在封闭场地进行测试认证,此外在道路测试基础上总结出危险场景,反馈到仿真测试与封闭场地测试中,最终形成评价结果,逐步完善评价准则和测试场景库,实现了仿真测试、封闭场地测试、道路测试的测试闭环,推动技术迭代升级。
五、自动驾驶汽车中的感知
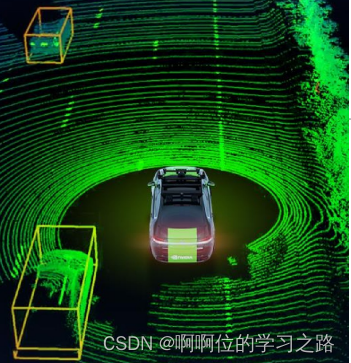
如果说人类获取信息的最主要方式是眼睛。那么对于自动驾驶汽车来说,最主要的方式是感知。为了确保车辆对周围环境的获取和识别,自动驾驶系统的感知模块需要通过各种传感器获取大量的环境信息,包括自车的状态、交通流信息、道路状况、交通标志等,这些传感器主要包括:激光雷达(Lidar)、摄像头(Camera)、毫米波雷达(Millimeter Wave Radar)等。其中最重要,也是最常见的就是激光雷达和摄像头。
据凯蒂·瓦沙博女士所述,自动驾驶汽车利用地面实况地图、安装在汽车上的各种传感器等来感知一切有用的信息,包括定位车辆。提供基于位置的服务,更新其它车辆和道路的信息,这一感知主要通过GPS模块来实现。在完成感知后,构建人工智能驾驶舱,将人工智能、外部和内部传感器勇于:AV可视化、安全便利的驾驶、信息娱乐(如中控大屏中的娱乐功能)。
我想着重介绍一下激光雷达。NVIDIA的适用于自动驾驶汽车的解决方案运用到了激光雷达。目前市面上激光雷达是一类使用激光束进行探测和测距的设备,按有无机械旋转部件分类,包括机械激光雷达和固态激光雷达,机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则依靠电子部件来控制激光发射角度,无需机械旋转部件。目前常用的是机械式旋转结构的激光雷达,它能够每秒向外界发送数百万的激光脉冲。激光雷达可以实时的建立起周围环境的三维地图,通常是以10hz左右的频率对周围环境进行旋转扫描,每一次的扫描结果是密集的点构成的三维图,每个点包括空间坐标(x,y,z)信息,由于扫描结果是反射点的集合,并且点的数量巨大,因此又被称为点云数据,点云数据构建的图也叫点云图(Point Cloud Graph)。利用此可实现对环境的全面感知。
六NVIDIA DRIVE Map
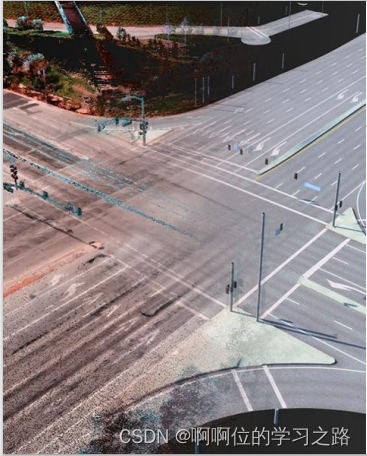
NVIDIA DRIVE Map是一个多模态地图构建平台,旨在实现高级别的自主驾驶并同时提高安全性。它兼具真实数据建图的准确性,以及基于 AI 的车队源建图的及时性和规模。DRIVE Map 具有四个定位层(分别是摄像头、激光雷达、雷达和 GNSS),可提供更先进的 AI 驱动所需的冗余和各种功能。
据NVIDIA Self Driving Cars网站和凯蒂·瓦沙博女士介绍,它拥有真值地图数据,实现更高的准确性而设计,配备 NVIDIA DRIVE Hyperion 数据采集车辆,使用摄像头、雷达、激光雷达和差分 GNSS/IMU 等丰富多样的传感器创建 DRIVE Map。在高速公路和城市环境等选定环境中,它能够实现 5 厘米的精确度,从而达成更高级别的自主性 (L3/L4)。并且拥有车队源地图数据,DRIVE Map 专为实现近乎实时的操作和全球可扩展性而设计。它基于真实数据和车队源数据,代表了数百万车辆的集体记忆。DRIVE Map 利用DRIVE Hyperion
传感器套件和其他合作伙伴传感器组中的数据流,包含所有必需的特征和语义信息(包括动态和行为信息),可提供安全舒适的驾驶体验。实现了全球覆盖,DRIVE Map 旨在为全球各地的辅助型汽车和自动型汽车提供支持。NVIDIA 正在创建北美、欧洲和亚洲主要高速公路(总里程超过 50 万公里)的高精度地图,此大型高精度地图将由数百万辆客车不断扩展和更新。实现了多功能数字孪生,Omniverse 上的 NVIDIA DRIVE Sim 能够进一步增强这些地图生成的数字孪生,适用于自动驾驶模拟、远程操作和车队管理模拟等不同类型的应用。

最后,让我们期待完全自动驾驶技术的普及到来。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!