教程 | 阿克曼结构移动机器⼈的gazebo仿真(四)
第四章、手撸阿克曼小车URDF代码
01前言
上节说到通过twist消息控制从solidworks导出的阿克曼小⻋,但后续的开发⼯作中发现了从SW导出的模型做仿真有⼀些弊端,导致仿真的效果并不理想,所以博主准备⼿写⼀个urdf代码,并通过模型替代法来实现tianracer的仿真,本次写的urdf⽂件是基于tianracer小⻋1:1⽐例来编写的,⽅便后续的模型替换⼯作。
02创建小车功能包
在⼯作空间内创建racebot_description功能包:
catkin_create_pkg racebot_description roscpp rospy std_msgs在该⼯作空间下创建config、launch、rviz_config、scripts、urdf等⽂件夹,此时准备⼯作已经做完。
03配置创建环境
我们需要创建⼀个URDF⽂件与能让模型在rviz中显⽰的launch⽂件,⽅便我们创造模型。以创建小⻋base_link模型为例:
在urdf⽂件夹中创建racebot.urdf⽂件,⾸先创建base_link,由于根link不能包含碰撞属性,否则gazebo仿真中会报错,所以我们将base_footprint作为根link,并且将base_footprint设置为小⻋贴到地⾯的位置,由于该小⻋是1:1仿真tianracer的,所以base_link在base_footprint正上⽅32mm处,如下代码所⽰:
接着在launch⽂件夹中创建⼀个可以将小⻋模型在rviz中显⽰的launch⽂件racebot_rviz.launch,并且能够加载上述urdf⽂件:
此时我们运⾏该launch⽂件:
roslaunch racebot_description racebot_rviz.launch添加RobotModel插件,并将fixed frame改为base_footprint,此时我们便能在rviz中看到⼀个漂浮在空中的橙⾊⽅块,此为小⻋模型的base_link:
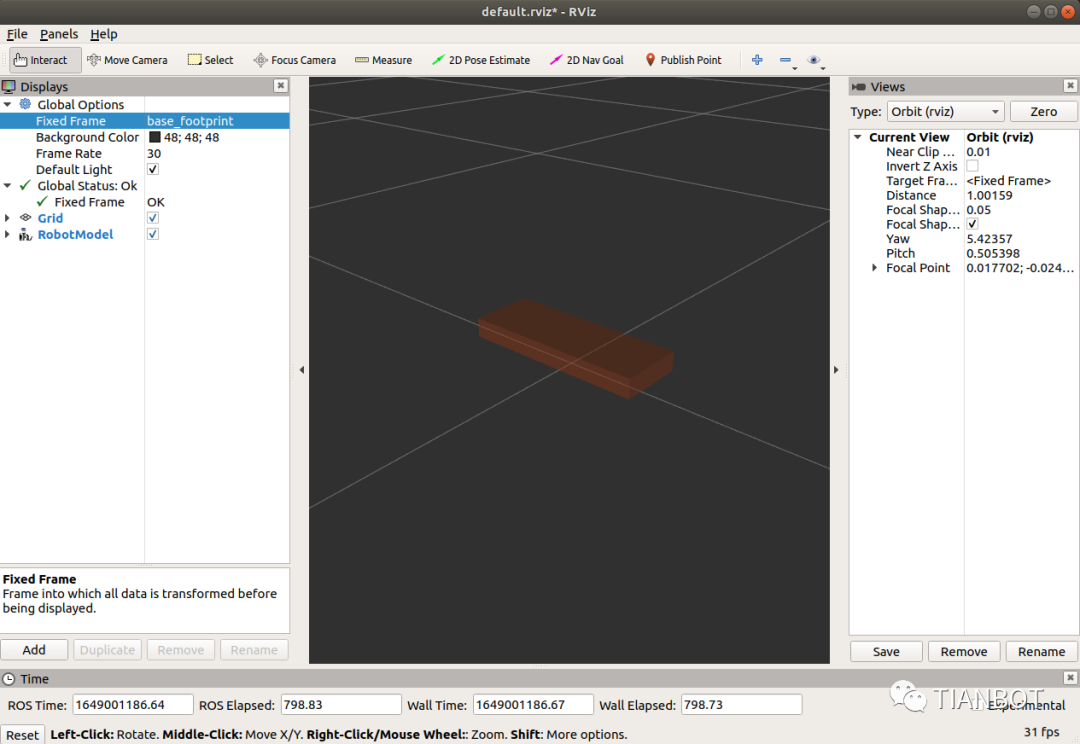
点击FILE--save config as选择racebot_description/rviz_config路径保存为racecar.rviz,并在launch中启动rviz节点时加载该配置⽂件,以便后续的开发。
04添加前轮摆转以及前后轮
·添加左前轮以及左前轮摆转
在阿克曼仿真第⼀节的时候了解到要使前轮转向,以左前轮为例,需要给左前轮加⼀个绕Z轴转动的⾃由度,因此需要添加⼀个能够摆转的link,将其命名为steering_hinge,前轮通过与其连接能够实现绕Z轴转动,joint_type设置为revolute,转动幅度设置为-0.6rad--0.6rad,effort与velocity分别设置为50,1000以⽅便后续控制。
左前轮配置好了以后,右前轮同理,值得注意的是需要修改joint标签内的origin标签,可以⼤致理解为左前轮在第⼀象限,右前轮为第四象限,X轴正⽅向为小⻋的前进⽅向。在配置URDF的时候,若仅仅是想要在RVIZ中观察编写的模型情况,可以在link标签中,先不需要编写collision标签,编写collision时需要计算该link的惯性矩阵参数,会较为繁琐,可以在确定模型装配情况后最后编写collision标签。计算惯性矩阵的⽅法如下:
【关于URDF中的惯性矩阵描述问题】
·配置后轮
前轮配置完成后,配置后轮,以左后轮为例,代码如下,右后轮同理:
05配置传感器
tianracer小⻋共有三样传感器,分别为单⽬相机,深度相机以及激光雷达,当然可以加⼊imu模块以作后备,这些link的装配都是相对固定的,因此惯性参数对其⽆太⼤影响,可以取⼀个⼤致值:
·配置单目相机:
·配置深度相机:
·配置单线激光雷达:
·配置imu模块:
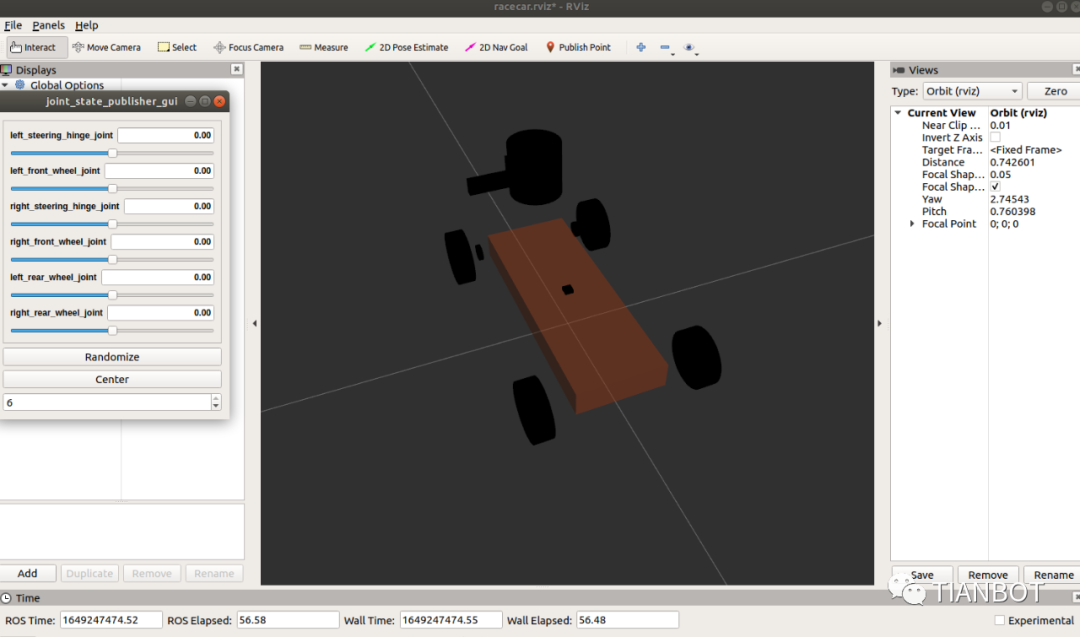
此时,小⻋URDF已经配置完成了,可以在rviz中观察模型效果:
06小结
⾄此,已经将小⻋的URDF代码书写完毕,下⼀节将URDF优化为xacro,并加⼊传感器插件,以及小⻋轮⼦的传动。
参考资料:
1.古⽉⽼师的<
2.关于URDF中的惯性矩阵描述问题: https://blog.csdn.net/weixin_43455581/article/details/110876633
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!