微分---跟踪器(TD)
方法参考自
——微分跟踪器的研究与应用
张海丽
张宏丽
传统的PID 从含有噪音的信号提取具有降将噪音增大或超调量增大的特点。将微分跟踪器应用于PID,可以得到原始信号的最佳逼近。
优点:TD与PID有效地提取了原始信号,克服消极因素,有较强的抗噪声的能力,无超调的跟踪原始信号。
TD的控制公式如下:
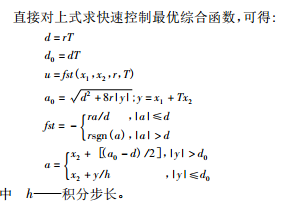
float fst(float x1, float x2, float v)
{float td_y = 0;float a0 = 0;float a = 0;float fhan = 0;float d = 0;float d0 = 0;d = r*h;d0 = h*d;td_y = x1 - v + h*x2;a0 = sqrt(d*d + 8 * r*fabs(td_y));if (fabs(td_y)>d0)a = x2 + 0.5*(a0 - d)*sign(td_y);elsea = x2 + td_y / h;if (fabs(a)>d)fhan = -r*sign(a);elsefhan = -r*a / d;return(fhan);
}float ADRC(float v, float y) // v是控制系统的输入,y是控制系统的输出
{float u0;float e = 0;float e1 = 0;float e2 = 0;//********** TD ************td_x1 = td_x1 + h*td_x2; //td_x1=v1;td_x2 = td_x2 + h*fst(td_x1, td_x2, v); //td_x2=v2;e1 = td_x1 - y; e2 = td_x2 ;u0 = P* e1 + D * e2;if(u0 > 10) u0 = 10;if(u0 < -10) u0 = -10;return(u0); 经过实际检测!
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!