CARLA相机传感器坐标系
CARLA使用虚幻引擎坐标系。这是Z-up左手系统。
Class that represents a 3D rotation and therefore, an orientation in space. CARLA uses the Unreal Engine coordinates system. This is a Z-up left-handed system.
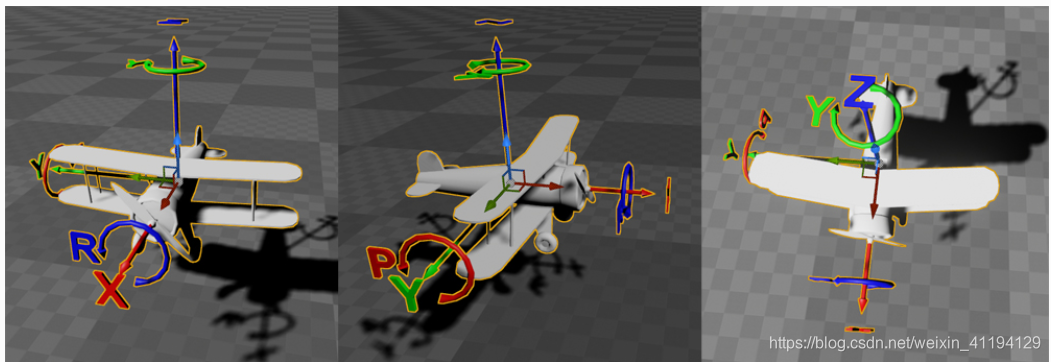
构造函数方法遵循特定的声明顺序:(pitch, yaw, roll),对应于(Y-rotation,Z-rotation,X-rotation)。
Instance Variables
pitch (float – degrees)
Y-axis rotation angle.
yaw (float – degrees)
Z-axis rotation angle.
roll (float – degrees)
X-axis rotation angle.
Methods
__init__(self, pitch=0.0, yaw=0.0, roll=0.0)
Parameters:
pitch (float – degrees) – Y-axis rotation angle.
yaw (float – degrees) – Z-axis rotation angle.
roll (float – degrees) – X-axis rotation angle.
Warning: The declaration order is different in CARLA (pitch,yaw,roll), and in the Unreal Engine Editor (roll,pitch,yaw). When working in a build from source, don’t mix up the axes’ rotations.
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!