【三维目标检测】Part-A2(二)
本文为博主原创文章,未经博主允许不得转载。
本文为专栏《python三维点云从基础到深度学习》系列文章,地址为“https://blog.csdn.net/suiyingy/article/details/124017716”。
PartA2数据和源码配置调试过程请参考上一篇博文:【三维目标检测】Part-A2(一)_Coding的叶子的博客-CSDN博客。本文主要详细介绍PartA2网络结构及其运行中间状态。
1 PartA2模型总体过程
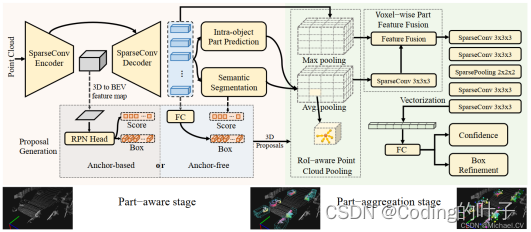
Part-A2的整体结构如下图所示,主要包括Part-Aware stage 和Part-aggregation stage两个阶段。Part-Aware stage主要是提取点云中各个点的特征,包括语义分割特征和目标内部点的特征,提取特征的方法是一个采用三维稀疏卷积的UNET结构。UNET是二维图像语义分割中比较常见的一个主干网络结构,Part-A2沿用了这个结构,并且将二维卷积相应地替换成三维稀疏卷积。Part-Aggregation stage阶段主要是根据上一阶段的特征和候选框proposal生成最终的目标分类、置信度和位置预测特征,这个功能与SECOND等三维目标检测网络基本一致,但进行了语义特征和Part 特征的融合。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!