【解救Ros】两个窗口教你实战运行ros小车
一、第一个终端
1.与ros小车建立通信(同一个局域网,不要使用校园网)
ssh clbrobot@clbrobt输入密码回车即可
2.发布消息
roslaunch clbrobot bringup.launch二、第二个终端
1.与ros小车建立通信(同一个局域网,不要使用校园网)
ssh clbrobot@clbrobt2.连接键盘节点
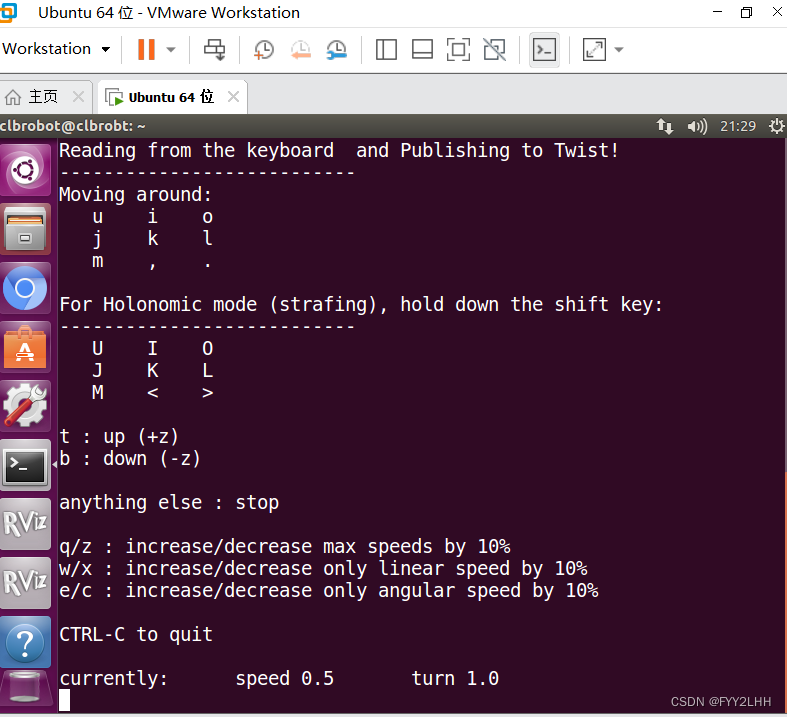
rosrun teleop_twist_keyboard teleop_twist_keyboard.py以上两个端口可以启动ros小车了,下面在此窗口即可按下列的键即可运行小车
3.关机
新建一个窗口与小车建立通信
ssh clbrobot@clbrobt在clbrobot@clbrobt窗口输入以下命令
sudo halt小车的显示屏出现“创乐博”页面,再关闭电源即可
4.开启摄像头
新建一个窗口,建立通信
ssh clbrobot@clbrobt然后运行相机节点文件
roslaunch clbrobot camera.launch继续新建一个窗口,也就是在CLB@CLB这个窗口
roslaunch riki_line_follower riki_line.launch摄像头就被打开了
【注】只要能与小车建立通信,那么小车上的显示屏显示就不重要了,后面的操作都可以在Ubuntu中进行,小车显示屏主要还是在同一个局域网下与Ubuntu系统建立通信。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!