ROS报错记录及解决方法
Xacro_(1)属性与算数运算
用于封装 URDF 中的一些字段,比如: PAI 值,小车的尺寸,轮子半径 ....
属性定义
属性调用
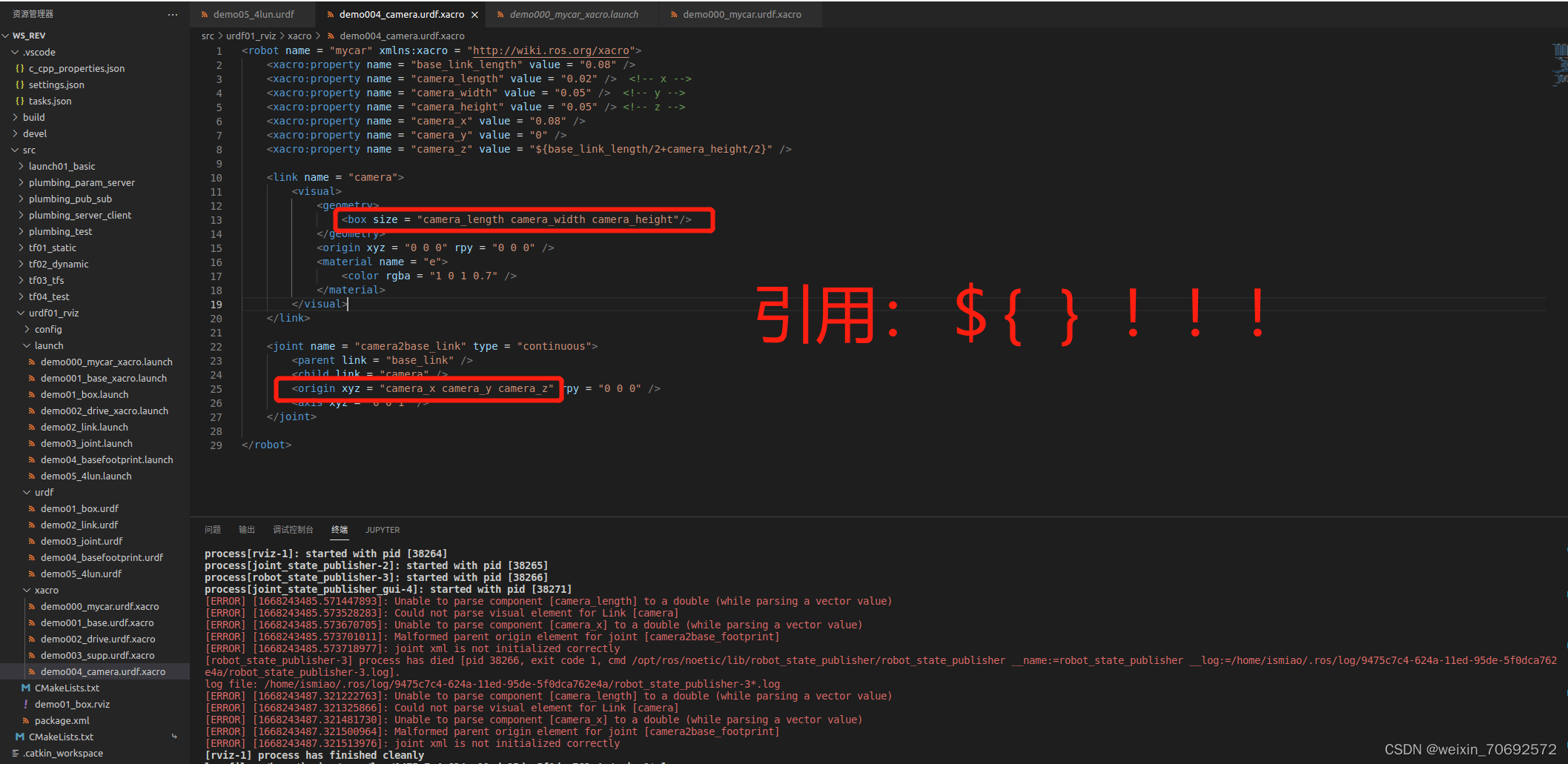
${属性名称}算数运算
${数学表达式}问题描述
[ERROR]Unable to parse component [camera_length] to a double (while parsing a vector value)
[ERROR]Could not parse visual element for Link [camera]
[ERROR]Unable to parse component [camera x] to a double (while parsing a vector value)
[ERROR]Malformed parent origin element for joint [camera2base footprint]
[ERROR]joint xml is not initialized correctly
原因分析:
参数调用时应检查格式是否正确
例如:${属性名称}
解决方案:
调用时使用正确格式:${ param_name }
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!