非线性滤波——INS/GPS组合导航仿真数据的生成
INS与其他传感器组合导航领域内,经常需要一些真实的理论数据作为参考,同时也需要带有自定义噪声的传感器测量数据,用以验证我们所设计或实现的算法是否合理有效。
本文使用MATLAB软件,基于真实的时间、北向位移、东向位移、海拔高度、北向速度、东向速度、下方速度、载体姿态角(俯仰、横滚、偏航)和载体姿态角速度等信息,使用随机噪声和常值偏差来生成GPS、IMU及磁强计的虚拟测量值。
本文真实数据及部分程序来源于参考文献:
Barton, Jeffrey. (2012). Fundamentals of Small Unmanned Aircraft Flight. Johns Hopkins Apl Technical Digest. 31. 132-149.
这篇参考文献对自己的EKF算法的理解及工程化实现起到了至关重要的作用,在此对上述参考文献的作者表示感谢。
%% 导入真实值数据
load('UavData_SquareSpiral.mat');%% 定义传感器测量特性
% 重力常量
gravity_mps2 = 9.81;% 初始化uavSensors结构体,并赋值时间
uavSensors=[];
uavSensors.sigmas=[];
uavSensors.biases=[];
uavSensors.params=[];
uavSensors.time_s = uavTruth.time_s;% 设置传感器测量噪声特性
uavSensors.sigmas.gyro_noise_rps = 0.01; % 陀螺仪测量高斯噪声特性,rad/s
uavSensors.sigmas.gyro_bias_rps = 0.01; % 陀螺仪测量常值偏差特性,rad/s
uavSensors.sigmas.accel_noise_mps2 = 0.1; % 加速度计测量高斯噪声特性,m/s^2
uavSensors.sigmas.accel_bias_mps2 = 0.1; % 加速度计测量常值偏差特性,m/s^2
uavSensors.sigmas.GPSpos_noise_m = 2; % GPS位置测量高斯噪声特性,m
uavSensors.sigmas.GPSpos_bias_m = 0; % GPS位置测量常值偏差,m
uavSensors.sigmas.GPSvel_noise_mps = 1; % GPS速度测量高斯噪声特性, m/s
uavSensors.sigmas.GPSvel_bias_mps = 0; % GPS速度测量常值偏差,m/s
uavSensors.sigmas.mag3D_unitVector_noise = 0.02; % 磁强计3D测量噪声特性(单位向量)
uavSensors.sigmas.mag3D_unitVector_bias = 0; % 磁强计3D测量常值偏差特性(单位向量)% 设置 GPS 更新频率
uavSensors.params.dt_GPS_s = 1.0; % GPS更新时间间隔,s
% 此处我们将磁偏角置零
uavSensors.params.mag_declination_deg = 0*randn; %% 传感器测量值 = 真实值 + 常值偏差项*randn + 高斯噪声项*randn
%% 生成GPS测量数据
uavSensors.biases.GPS_east_m = uavSensors.sigmas.GPSpos_bias_m*randn; % Matlab中,rand是0-1的均匀随机分布,而randn是均值为0方差为1的正态分布
uavSensors.biases.GPS_north_m = uavSensors.sigmas.GPSpos_bias_m*randn;
uavSensors.biases.GPS_h_m = uavSensors.sigmas.GPSpos_bias_m*randn;
uavSensors.biases.GPS_Vned_mps= uavSensors.sigmas.GPSvel_bias_mps*randn(1,3);uavSensors.GPS_east_m = uavTruth.east_m ... + uavSensors.biases.GPS_east_m ...+ uavSensors.sigmas.GPSpos_noise_m*randn(size(uavTruth.time_s));
uavSensors.GPS_north_m = uavTruth.north_m ...+ uavSensors.biases.GPS_north_m ...+ uavSensors.sigmas.GPSpos_noise_m*randn(size(uavTruth.time_s));
uavSensors.GPS_h_msl_m = uavTruth.h_msl_m ... + uavSensors.biases.GPS_h_m ...+ uavSensors.sigmas.GPSpos_noise_m*randn(size(uavTruth.time_s));
for m=[1 2 3] % 1: North, 2: East, 3: Down uavSensors.GPS_v_ned_mps(:,m) = uavTruth.v_ned_mps(:,m) ...+ uavSensors.biases.GPS_Vned_mps(m) ...+ uavSensors.sigmas.GPSvel_noise_mps*randn(size(uavTruth.time_s));
end
% - GPS_valid:1-有效;0-无效
% - GPS_valid=0时,GPS测量值为NaN
kGPS = interp1(uavTruth.time_s,1:length(uavTruth.time_s),uavTruth.time_s(1):uavSensors.params.dt_GPS_s:uavTruth.time_s(end),'nearest'); % interp1(x,v,xq,method) 使用线性插值返回一维函数在特定查询点的插入值。向量 x 包含样本点,v 包含对应值 v(x)。向量 xq 包含查询点的坐标
uavSensors.GPS_valid = false(size(uavSensors.time_s)); % \ Initialze GPS_valid to a vector of "false" values.
uavSensors.GPS_valid(kGPS)=true; % / Set GPS_valid to "true" for GPS update times.
uavSensors.GPS_east_m(~uavSensors.GPS_valid) = NaN; % \
uavSensors.GPS_north_m(~uavSensors.GPS_valid) = NaN; % | GPS values are set to NaN
uavSensors.GPS_h_msl_m(~uavSensors.GPS_valid) = NaN; % | if not valid
uavSensors.GPS_v_ned_mps(~uavSensors.GPS_valid,:) = NaN; % /% IMU 陀螺仪角速度测量值(机体坐标系下)
uavSensors.biases.gyro_wb_rps = uavSensors.sigmas.gyro_bias_rps*randn(1,3);
for m=[1 2 3] % 1: body-x, 2: body-y, 3: body-z uavSensors.gyro_wb_rps(:,m) = uavTruth.wb_rps(:,m) ...+ uavSensors.biases.gyro_wb_rps(m) ...+ uavSensors.sigmas.gyro_noise_rps*randn(size(uavTruth.time_s));
end% IMU 加速度计测量值(机体坐标系下)
uavSensors.biases.accel_fb_mps2 = uavSensors.sigmas.accel_bias_mps2*randn(1,3);
% 梯度法求导航系(NED)下的加速度
vdot_n_mps2 = gradient(uavTruth.v_ned_mps(:,1),uavTruth.time_s);
vdot_e_mps2 = gradient(uavTruth.v_ned_mps(:,2),uavTruth.time_s);
vdot_d_mps2 = gradient(uavTruth.v_ned_mps(:,3),uavTruth.time_s);
vdot_ned_mps2 = [vdot_n_mps2 vdot_e_mps2 vdot_d_mps2]; % [nx3 double]
for kTime=1:length(uavTruth.time_s)% Compute NED-to-body Direction Cosine Matrix for time index kTime.% See rotation_examples.m for more information about converting between% different rotation representations. Here we use the method in% Section B of rotation_examples.m to convert from Euler angles to DCM.yaw_rad = pi/180*uavTruth.yaw_deg(kTime);pitch_rad = pi/180*uavTruth.pitch_deg(kTime);roll_rad = pi/180*uavTruth.roll_deg(kTime);% 旋转矩阵:导航系(NED)到机体坐标系C_ned2b = [cos(pitch_rad)*cos(yaw_rad) cos(pitch_rad)*sin(yaw_rad) -sin(pitch_rad); ...sin(roll_rad)*sin(pitch_rad)*cos(yaw_rad)-cos(roll_rad)*sin(yaw_rad) sin(roll_rad)*sin(pitch_rad)*sin(yaw_rad)+cos(roll_rad)*cos(yaw_rad) sin(roll_rad)*cos(pitch_rad); ...cos(roll_rad)*sin(pitch_rad)*cos(yaw_rad)+sin(roll_rad)*sin(yaw_rad) cos(roll_rad)*sin(pitch_rad)*sin(yaw_rad)-sin(roll_rad)*cos(yaw_rad) cos(roll_rad)*cos(pitch_rad)];% 计算载体坐标系下的加速度真实值fb_mps2_perfect = C_ned2b*vdot_ned_mps2(kTime,:)' - C_ned2b*[0;0;gravity_mps2];% 计算载体坐标系下的三轴加速度测量值(含有噪声)uavSensors.accel_fb_mps2(kTime,:) = fb_mps2_perfect' ...+ uavSensors.biases.accel_fb_mps2 ...+ uavSensors.sigmas.accel_noise_mps2*randn(1,3);
end% 三轴磁强计测量得到的偏航角
uavSensors.biases.mag3D_unitVector = uavSensors.sigmas.mag3D_unitVector_bias*randn(1,3);
for kTime=1:length(uavTruth.time_s)yaw_rad = pi/180*uavTruth.yaw_deg(kTime);pitch_rad = pi/180*uavTruth.pitch_deg(kTime);roll_rad = pi/180*uavTruth.roll_deg(kTime);% 与加速度计测量值的处理方式类似,先计算旋转矩阵C_ned2b = [cos(pitch_rad)*cos(yaw_rad) cos(pitch_rad)*sin(yaw_rad) -sin(pitch_rad); ...sin(roll_rad)*sin(pitch_rad)*cos(yaw_rad)-cos(roll_rad)*sin(yaw_rad) sin(roll_rad)*sin(pitch_rad)*sin(yaw_rad)+cos(roll_rad)*cos(yaw_rad) sin(roll_rad)*cos(pitch_rad); ...cos(roll_rad)*sin(pitch_rad)*cos(yaw_rad)+sin(roll_rad)*sin(yaw_rad) cos(roll_rad)*sin(pitch_rad)*sin(yaw_rad)-sin(roll_rad)*cos(yaw_rad) cos(roll_rad)*cos(pitch_rad)];% 考虑磁偏角的影响C_mag2ned = [ cos(-pi/180*uavSensors.params.mag_declination_deg) sin(-pi/180*uavSensors.params.mag_declination_deg) 0; ...-sin(-pi/180*uavSensors.params.mag_declination_deg) cos(-pi/180*uavSensors.params.mag_declination_deg) 0; ...0 0 1];% [1;0;0] 表示% 北-东-地,载体坐标系与北-东-地坐标系对齐时(俯仰角、横滚角、偏航角为零),此时三轴磁强计的的X轴测量最大,Y轴和Z轴测量值为0,归一化之后为[1;0;0](此处忽略磁倾角的影响,但实际工程中磁倾角影响很大)M = C_ned2b*C_mag2ned*[1;0;0] ...+ uavSensors.biases.mag3D_unitVector' ...+ uavSensors.sigmas.mag3D_unitVector_noise*randn(1,3)';M = M/norm(M);% 计算得到三轴磁强计的测量值uavSensors.mag3D_unitVector_in_body(kTime,:) = M';% 也可以更进一步的假设:三轴磁强计直接输出航向角uavSensors.mag2D_yaw_deg(kTime,1) = 180/pi*atan2(-M(2),M(1)) + uavSensors.params.mag_declination_deg;uavSensors.mag2D_yaw_deg(kTime,1) = mod(uavSensors.mag2D_yaw_deg(kTime,1)+180,360)-180; % -180 <= yaw <=180 % 若直接得到航向角,将三轴磁强计的测量噪声直接等效为航向角的测量误差if kTime==1uavSensors.sigmas.mag2D_yaw_noise_rad = 1*uavSensors.sigmas.mag3D_unitVector_noise;uavSensors.sigmas.mag2D_yaw_bias_rad = 1*uavSensors.sigmas.mag3D_unitVector_bias;end
end
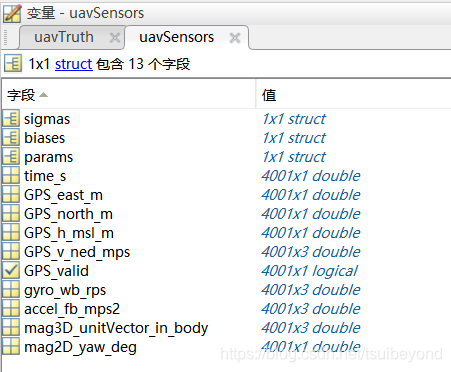
运行后得到
该部分代码在github及gitee(国内镜像)中维护,地址:
https://github.com/tsuibeyond/BasicEKF
https://gitee.com/tsuibeyond/BasicEKF
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!