自动控制原理学习笔记(三)
第三章 时域分析
文章目录
- 第三章 时域分析
- 3.1 典型输入信号
- ==3.2 线性系统时域性能指标(稳定系统)==
- 3.3 一阶系统
- ①单位阶跃响应
- ②单位脉冲响应
- ③单位斜坡响应
- ④单位匀加速度响应
- 3.4线性定常系统重要特性
- 3.5 二阶系统
- 3.5.1 二阶系统单位阶跃响应
- ①★欠阻尼★
- ②无阻尼
- ③临界阻尼
- ④过阻尼
- ⑤负阻尼
- 二阶系统动态性能随极点位置分布的变化规律
- 3.5.2 二阶系统单位脉冲响应
- 无阻尼
- 欠阻尼
- 临界阻尼
- 3.5.3 二阶系统单位斜坡响应
- 3.6 高阶系统
- 一些结论
- 主导极点
- 3.7基于脉冲传递函数的离散系统时域分析 (6.8.1~6.8.2)
- 极点分布与响应
- 3.8 基于状态空间的时域分析
- 线性定常连续系统
- 运动分析
- 状态转移矩阵
- 齐次方程求解(零输入)
- ==非齐次方程求解==
- 离散系统
- ==线性定常连续系统状态方程的离散化==
- 线性定常离散系统状态方程的解
-
特点:
- 分析设计直观准确
- 提供时间响应的全部信息
- 解析解较繁琐
-
方法步骤
- 传递函数
- 通过逆变换求出时域响应 y ( t ) y(t) y(t)
- 根据 y ( t ) y(t) y(t)分析系统性能
3.1 典型输入信号
- 单位脉冲
- 单位阶跃
- 单位匀速
- 单位加速度
- 正弦
3.2 线性系统时域性能指标(稳定系统)
- 延迟时间 t d t_d td:阶跃响应第一次到达稳态值的50%所需时间
- 上升时间 t r t_r tr :稳态值10%到90%所用的时间。振荡:0到第一次稳态值所用时间
- 峰值时间 t p t_p tp:超越终值达到第一个峰值所需时间
- 超调量 σ p \sigma_p σp:百分比 σ p = y ( t p ) − y ( ∞ ) y ( ∞ ) × 100 % \sigma_p=\dfrac{y(t_p)-y(\infty)}{y(\infty)}\times 100\% σp=y(∞)y(tp)−y(∞)×100%
- 调节时间 t s t_s ts:到达并保持在终值5%或2%误差带内所需的最短时间
- 振荡次数 N N N:调节时间内,单位阶跃响应穿越稳态值次数的一半
3.3 一阶系统
- Φ ( s ) = 1 T s + 1 \varPhi(s) = \dfrac{1}{Ts+1} Φ(s)=Ts+11
①单位阶跃响应
- 响应: y ( t ) = 1 − e − t T y(t)=1-e^{-\frac{t}{T}} y(t)=1−e−Tt
- y ( T ) = 0.632 y(T)=0.632 y(T)=0.632
- y ( 3 T ) ≈ 0.95 y(3T)\approx 0.95 y(3T)≈0.95,即 t s = 3 T t_s=3T ts=3T
- 无稳态误差
- 提高快速性:减小时间常数 T T T
- 由阶跃响应求 T : d y d t ∣ t = 0 = 1 T T: \frac{dy}{dt}|_{t=0}=\frac{1}{T} T:dtdy∣t=0=T1
②单位脉冲响应
- 响应: y ( t ) = 1 T e − t T , t ≥ 0 y(t)=\dfrac{1}{T}e^{-\frac{t}{T}}\ ,t\geq 0 y(t)=T1e−Tt ,t≥0
- y ( 0 ) = 1 T y(0)=\dfrac{1}{T} y(0)=T1
- y ( T ) = 0.368 1 T y(T)=0.368\dfrac{1}{T} y(T)=0.368T1
③单位斜坡响应
- y ( t ) = t − T ( 1 − e − t T ) , t ≥ 0 y(t)=t-T(1-e^{-\frac{t}{T}})\ ,\ t\geq 0 y(t)=t−T(1−e−Tt) , t≥0
- 稳态误差 e = T e=T e=T (减小T可以减小稳态误差)
④单位匀加速度响应
- y ( t ) = 1 2 t 2 − T t + T 2 ( 1 − e − t T ) , t ≥ 0 y(t)=\dfrac{1}{2}t^2-Tt+T^2(1-e^{-\frac{t}{T}})\ ,t\geq 0 y(t)=21t2−Tt+T2(1−e−Tt) ,t≥0
3.4线性定常系统重要特性
- 系统对输入信号导数的响应=系统对原信号的响应的导数
- 积分同理,积分常数由零输出时的初始条件决定
3.5 二阶系统
- $\varPhi(s) = \dfrac{Y(s)}{R(s)} = \dfrac{\omega_n2}{s2+2\zeta\omega_n s+\omega_n^2} $
- 闭环极点: s 1 , 2 = − ζ ω n ± ω n ζ 2 − 1 s_{1,2}=-\zeta\omega_n \pm \omega_n\sqrt{\zeta^2-1} s1,2=−ζωn±ωnζ2−1
- 开环传函: G ( s ) = ω n 2 s ( s + 2 ζ ω n ) G(s) = \dfrac{\omega_n^2}{s(s+2\zeta\omega_n)} G(s)=s(s+2ζωn)ωn2
3.5.1 二阶系统单位阶跃响应
①★欠阻尼★
- 0 < ζ < 1 0<\zeta<1 0<ζ<1
- s 1 , 2 = − ζ ω n ± j ω n 1 − ζ 2 s_{1,2}=-\zeta\omega_n \pm \mathrm j \omega_n\sqrt{1-\zeta^2} s1,2=−ζωn±jωn1−ζ2
- 设有阻尼振荡频率 ω d = ω n 1 − ζ 2 \omega_d = \omega_n\sqrt{1-\zeta^2} ωd=ωn1−ζ2
- 输入单位阶跃信号,可得输出:
Y ( s ) = Φ ( s ) 1 s = 1 s − s + ζ ω n ( s + ζ ω n ) 2 + ω d 2 − ζ ω n ( s + ζ ω n ) 2 + ω d 2 \begin{aligned} Y(s) &= \varPhi(s)\dfrac{1}{s} \\ &= \dfrac{1}{s} - \dfrac{s+\zeta\omega_n}{(s+\zeta\omega_n)^2+\omega_d^2} - \dfrac{\zeta\omega_n}{(s+\zeta\omega_n)^2+\omega_d^2} \\ \end{aligned} Y(s)=Φ(s)s1=s1−(s+ζωn)2+ωd2s+ζωn−(s+ζωn)2+ωd2ζωn
- 利用Laplace变换的位移性质,可得
y ( t ) = 1 − e − ζ ω n t ( cos ω d t + ζ ω n ω d sin ω d t ) = 1 − e − ζ ω n t 1 1 − ζ 2 sin ( ω d t + θ ) , t ≥ 0 \begin{aligned} y(t) &= 1-e^{-\zeta\omega_n t}(\cos \omega_d t + \frac{\zeta\omega_n}{\omega_d}\sin\omega_d t) \\ &= 1-e^{-\zeta\omega_n t}\dfrac{1}{\sqrt{1-\zeta^2}}\sin(\omega_d t+\theta) , t\geq 0\\ \end{aligned} y(t)=1−e−ζωnt(cosωdt+ωdζωnsinωdt)=1−e−ζωnt1−ζ21sin(ωdt+θ),t≥0
其 中 θ = arctan 1 − ζ 2 ζ 或 ζ = cos θ 其中 \theta = \arctan \dfrac{\sqrt{1-\zeta^2}}{\zeta}\ 或\ \zeta = \cos\theta\\ 其中θ=arctanζ1−ζ2 或 ζ=cosθ
- 稳态分量、暂态分量
- 包络线: y ( t ) = 1 ± e − ζ ω n t 1 − ζ 2 y(t)=1 \pm \dfrac{e^{-\zeta\omega_n t}}{\sqrt{1-\zeta^2}} y(t)=1±1−ζ2e−ζωnt
- 上升时间 t r = π − θ ω n 1 − ζ 2 t_r=\dfrac{\pi-\theta}{\omega_n\sqrt{1-\zeta^2}} tr=ωn1−ζ2π−θ, 系统快速性与 ω n \omega_n ωn成正比
- 峰值时间 t p = π ω n 1 − ζ 2 t_p=\dfrac{\pi}{\omega_n\sqrt{1-\zeta^2}} tp=ωn1−ζ2π
- 超调量 σ p = e − ζ π 1 − ζ 2 × 100 % = e − π cot θ \sigma_p=e^{-\dfrac{\zeta\pi}{\sqrt{1-\zeta^2}}}\times100\%=e^{-\pi \cot\theta} σp=e−1−ζ2ζπ×100%=e−πcotθ
- 调节时间$t_s = \begin{cases}\dfrac{4}{\xi\omega_n}&,\Delta=0.02\ \dfrac{3}{\xi\omega_n}&,\Delta=0.05\end{cases} $
- 振荡次数 N = { 2 1 − ζ 2 π ζ Δ = 0.2 1.5 1 − ζ 2 π ζ Δ = 0.05 N = \begin{cases}\dfrac{2\sqrt{1-\zeta^2}}{\pi\zeta}&&\Delta = 0.2\\\dfrac{1.5\sqrt{1-\zeta^2}}{\pi\zeta}&&\Delta = 0.05 \end{cases} N=⎩⎪⎪⎨⎪⎪⎧πζ21−ζ2πζ1.51−ζ2Δ=0.2Δ=0.05
②无阻尼
- ζ = 0 \zeta=0 ζ=0
- y ( t ) = 1 − cos ω n t , t ≥ 0 y(t) = 1-\cos\omega_n t\ ,\ t\geq 0 y(t)=1−cosωnt , t≥0
- 等幅振荡,调节时间正无穷
③临界阻尼
- ζ = 1 \zeta=1 ζ=1
- y ( t ) = 1 − e − ω n t ( 1 + ω n t ) , t ≥ 0 y(t) = 1-e^{-\omega_n t}(1+\omega_n t)\ ,\ t\geq 0 y(t)=1−e−ωnt(1+ωnt) , t≥0
- y ′ ( 0 ) = 0 y^\prime(0) = 0 y′(0)=0
- 稳态为 y = 1 y=1 y=1,无超调,单调上升
④过阻尼
-
ζ > 1 \zeta>1 ζ>1
无超调
⑤负阻尼
- − 1 < ζ < 0 -1<\zeta<0 −1<ζ<0
- 系统不稳定,发散
二阶系统动态性能随极点位置分布的变化规律
- 左半平面
- 远离虚轴
3.5.2 二阶系统单位脉冲响应
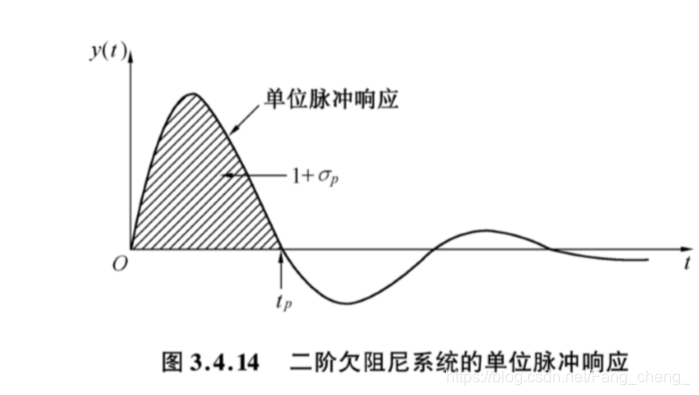
- y ( t p ) = ∫ 0 t p k ( t ) d t = 1 + σ p y(t_p) = \int_0^{t_p}k(t)\mathrm dt=1+\sigma_p y(tp)=∫0tpk(t)dt=1+σp
无阻尼
- k ( t ) = ω n sin ω n t , t ≥ 0 k(t)=\omega_n\sin\omega_nt\ \ ,t\geq0 k(t)=ωnsinωnt ,t≥0
欠阻尼
临界阻尼
3.5.3 二阶系统单位斜坡响应
3.6 高阶系统
Φ ( s ) = k ∏ j = 1 m ( s − z j ) ∏ i = 1 q ( s − s i ) ∏ k = 1 r ( s 2 + 2 ζ k ω n k s + ω n k 2 ) q + 2 r = n \varPhi(s) = \frac{k\prod\limits_{j=1}^m (s-z_j)}{\prod\limits_{i=1}^q(s-s_i)\prod\limits_{k=1}^r (s^2+2\zeta_k\omega_{nk}s+\omega_{nk}^2)}\\ \\ \\ q+2r=n Φ(s)=i=1∏q(s−si)k=1∏r(s2+2ζkωnks+ωnk2)kj=1∏m(s−zj)q+2r=n
一些结论
- 若闭环极点均在左半平面,则暂态分量都将收敛到零
- 收敛速度取决于:左半平面极点距离虚轴越远越快
- 实极点绝对值 ∣ s i ∣ |s_i| ∣si∣
- 复极点实部绝对值 ∣ ζ k ω n k ∣ |\zeta_k\omega_{nk}| ∣ζkωnk∣
- 暂态分量与零点相关:
- 若某极点靠近一零点且与其他极点相距较远,则该暂态分量影响较小
- 若一对闭环零、极点非常接近,称作一对“偶极子”,该极点对暂态过程几乎没有影响
主导极点
若
- 一对共轭极点(或一个实极点)距虚轴最近
- 且其他极点到虚轴距离均为其5倍以上
- 虚轴附近无单独闭环零点
则该极点成为高阶系统的主导极点
3.7基于脉冲传递函数的离散系统时域分析 (6.8.1~6.8.2)
- 输入 r ( t ) = 1 , R ( z ) = z z − 1 r(t)=1,\ R(z)=\dfrac{z}{z-1} r(t)=1, R(z)=z−1z
- 输出 y ( k T ) = A + ∑ i = 1 n B i p i k y(kT)=A+\sum\limits_{i=1}^nB_ip_i^k y(kT)=A+i=1∑nBipik
- 瞬态响应分量: ∑ i = 1 n B i p i k \sum\limits_{i=1}^nB_ip_i^k i=1∑nBipik
极点分布与响应
- 单位圆,详见离散系统稳定性一节
3.8 基于状态空间的时域分析
线性定常连续系统
运动分析
- 自由运动——零输入响应
- u = 0 u=0 u=0
- 强迫运动——零状态响应
- x ( t 0 ) = 0 x(t_0) = 0 x(t0)=0
状态转移矩阵
定义:对于齐次状态方程,若有 x ( t ) = Φ ( t ) x ( 0 ) x(t)=\varPhi(t)x(0) x(t)=Φ(t)x(0), 则称 Φ ( t ) \boldsymbol {\varPhi(t)} Φ(t) 为系统的状态转移矩阵。
-
若初始时刻不为0,而是 t 0 t_0 t0,则状态转移矩阵 Φ ( t , t 0 ) \varPhi(t, t_0) Φ(t,t0)
-
对于线性定常连续系统,本质上仍是矩阵指数函数 e A t e^{\boldsymbol At} eAt。
-
性质:
-
非奇异: ( e A t ) − 1 = e A ( − t ) (e^{\boldsymbol At})^{-1}=e^{\boldsymbol A(-t)} (eAt)−1=eA(−t)
-
当 A B = B A AB=BA AB=BA 时, e ( A + B ) t = e A t e B t e^{(A+B)t} = e^{At}e^{Bt} e(A+B)t=eAteBt ;
若 A B ≠ B A AB\neq BA AB=BA,则 e ( A + B ) t ≠ e A t e B t e^{(A+B)t} \neq e^{At}e^{Bt} e(A+B)t=eAteBt
-
微分性质: d d t e A t = A e A t = e A t A \dfrac{\mathrm d}{\mathrm dt}e^{\boldsymbol At} = \boldsymbol Ae^{\boldsymbol At} = e^{\boldsymbol At}\boldsymbol A dtdeAt=AeAt=eAtA (可用于:由 e A t e^{\boldsymbol At} eAt 求 A \boldsymbol A A)
-
相似变换:
若P为非奇异阵,即必存在 P − 1 P^{-1} P−1 ,则
- e P − 1 A P t = P − 1 e A t P e^{P^{-1}APt}=P^{-1}e^{At}P eP−1APt=P−1eAtP
-
对角阵情形:
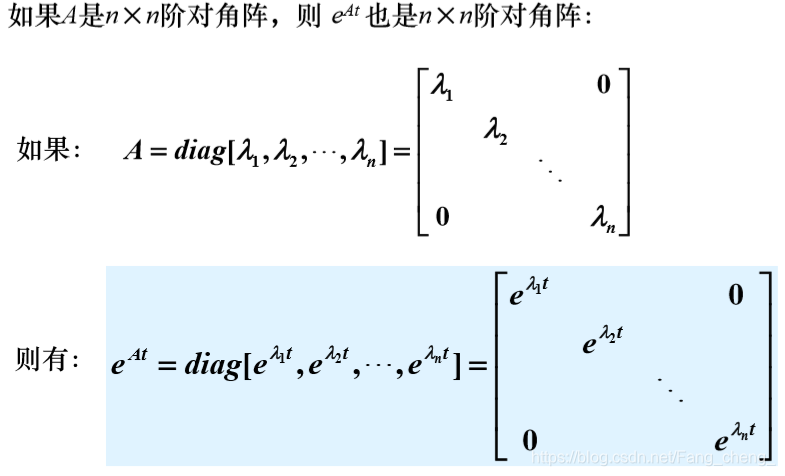
-
Jordan 块

-
当A是约当矩阵时:
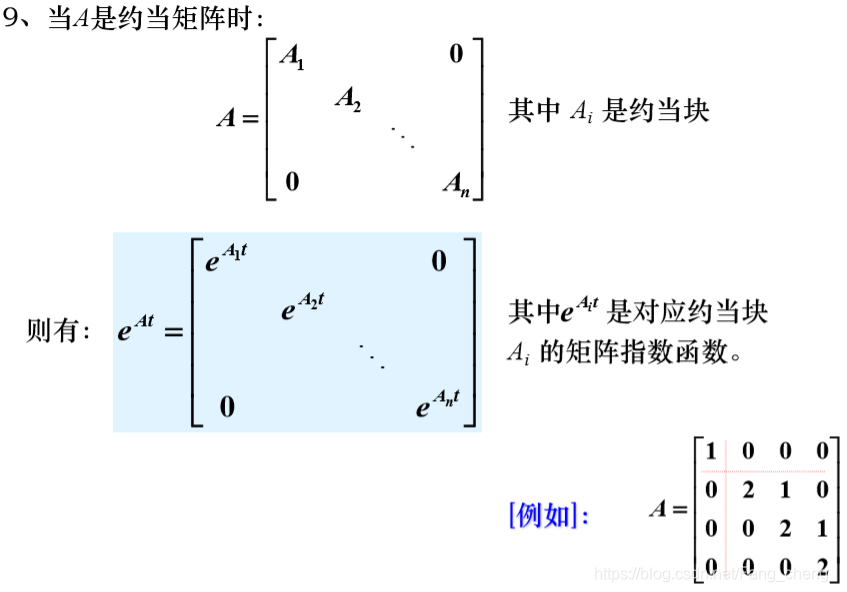
-
齐次方程求解(零输入)
-
x ˙ = A x \dot x = \boldsymbol A x x˙=Ax , A A A 为nxn阶定常方阵
-
指数函数的推广: x = e A t x 0 x = e^{\boldsymbol At}x_0 x=eAtx0 , e A t e^{\boldsymbol At} eAt 称为矩阵指数函数
-
矩阵指数函数定义:
e A t = d e f = ∑ k = 0 ∞ 1 k ! A k t k = I + A t + 1 2 A 2 t 2 + ⋯ + 1 k ! A k t k e^{\boldsymbol At} =^{def}= \sum\limits_{k=0}^\infty\dfrac{1}{k!}\boldsymbol A^kt^k=I+\boldsymbol At+\dfrac{1}{2}\boldsymbol A^2t^2+\cdots+\dfrac{1}{k!}\boldsymbol A^kt^k eAt=def=k=0∑∞k!1Aktk=I+At+21A2t2+⋯+k!1Aktk
-
求取 **矩阵指数函数(状态转移矩阵)**的方法:
-
定义法(级数)
e A t = ∑ k = 0 ∞ 1 k ! A k t k = I + A t + 1 2 A 2 t 2 + ⋯ + 1 k ! A k t k e^{\boldsymbol At}= \sum\limits_{k=0}^\infty\dfrac{1}{k!}\boldsymbol A^kt^k=I+\boldsymbol At+\dfrac{1}{2}\boldsymbol A^2t^2+\cdots+\dfrac{1}{k!}\boldsymbol A^kt^k eAt=k=0∑∞k!1Aktk=I+At+21A2t2+⋯+k!1Aktk
-
Laplace变换法
-
Laplace变换: s X ( s ) − x ( 0 ) = A X ( s ) sX(s)-x(0)=\boldsymbol A X(s) sX(s)−x(0)=AX(s)
-
X ( s ) = ( s I − A ) − 1 x ( 0 ) X(s) = (s\boldsymbol I -\boldsymbol A)^{-1}x(0) X(s)=(sI−A)−1x(0)
e A t = L − 1 [ ( s I − A ) − 1 ] e^{At}=\mathscr L^{-1} [(s\boldsymbol I -\boldsymbol A)^{-1}] eAt=L−1[(sI−A)−1]
x ( t ) = L − 1 [ ( s I − A ) − 1 ] x ( 0 ) x(t) = \mathscr L^{-1} [(s\boldsymbol I -\boldsymbol A)^{-1}]x(0) x(t)=L−1[(sI−A)−1]x(0)
- 凯莱哈密顿
- 构造Jordan块
非齐次方程求解

-
积分法
x ( t ) = e A ( t − t 0 ) x ( t 0 ) + ∫ t 0 t e A ( t − τ ) B u ( τ ) d τ x(t) = e^{A(t-t_0)}x(t_0)+\int_{t_0}^t e^{A(t-\tau)}Bu(\tau)\ \mathrm d\tau x(t)=eA(t−t0)x(t0)+∫t0teA(t−τ)Bu(τ) dτ -
Laplace 变换法(背下来)

x ( t ) = L − 1 [ ( s I − A ) − 1 x ( t 0 ) + ( s I − A ) − 1 B U ( s ) ] x(t) = \mathscr L^{-1}[(sI-A)^{-1}x(t_0)+(sI-A)^{-1}BU(s)] x(t)=L−1[(sI−A)−1x(t0)+(sI−A)−1BU(s)]
离散系统
- { x ( k + 1 ) = G x ( k ) + H u ( k ) y ( k ) = C x ( k ) + D u ( k ) \begin{cases} \boldsymbol{x}(k+1) &=& \boldsymbol{Gx}(k)+\boldsymbol{Hu}(k)\\ \boldsymbol{y}(k)&=& \boldsymbol{Cx}(k)+\boldsymbol{Du}(k) \end{cases} {x(k+1)y(k)==Gx(k)+Hu(k)Cx(k)+Du(k)
线性定常连续系统状态方程的离散化
G = e A T H = ( ∫ 0 T e A t d t ) B \boldsymbol G = e^{\boldsymbol AT}\\ \boldsymbol H = (\int_0^Te^{\boldsymbol At}\ \mathrm dt)\boldsymbol B G=eATH=(∫0TeAt dt)B
线性定常离散系统状态方程的解
- 迭代法
x ( k ) = G k x ( 0 ) + ∑ i = 0 k − 1 G k − i − 1 H u ( i ) \boldsymbol x(k) = \boldsymbol G^k \boldsymbol x(0)+\sum_{i=0}^{k-1} \boldsymbol G^{k-i-1}\boldsymbol{Hu}(i) x(k)=Gkx(0)+i=0∑k−1Gk−i−1Hu(i)
- Z变换法

本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!