C++ 常用时间获取函数汇总
方法篇
法一: ros
#include 另外ros还有睡眠和指定频率循环的功能:
ros::Duration(0.5).sleep(); // sleep for half a second/// 以10Hz的频率执行以下循环
ros::Rate r(10); // 10 hz
while (ros::ok())
{... do some work ...r.sleep();
}
还可以使用 ros::Timer比 ros::Rate更灵活。具体参见:https://www.ncnynl.com/archives/201701/1284.html
法二: chrono
#include 法三: omp
基于OpenMP,没有类的封装,用起来更直观一些。(可能效率也更高点?)
#include 法四: gettimeofday
#include 测试篇
测试最小时间间隔(重要!!!)
这里测试最小时间间隔(clock tick),应当是比较专业的测量了,最能代表方法的精度。后面的测试1、2都是在知道该方法前自己瞎测的。
//
// Created by daybeha on 2023/4/13.
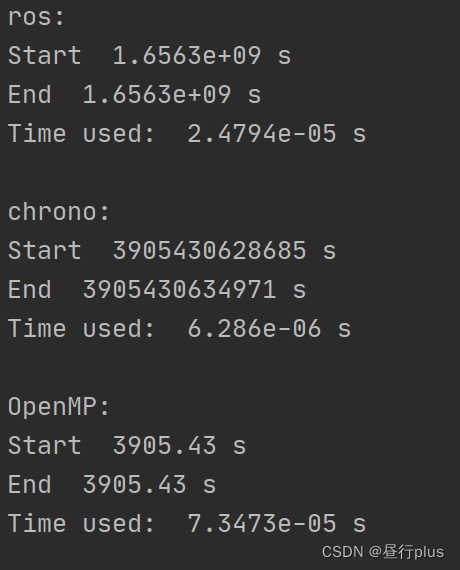
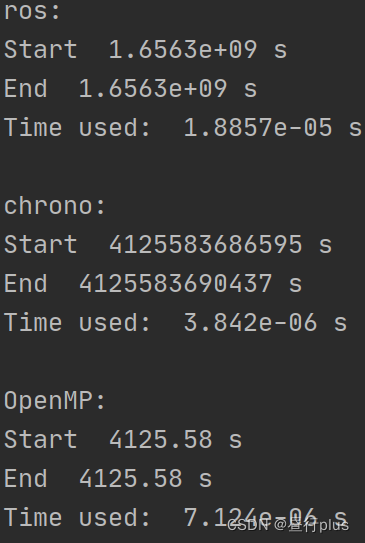
//#include 某次输出结果如下:
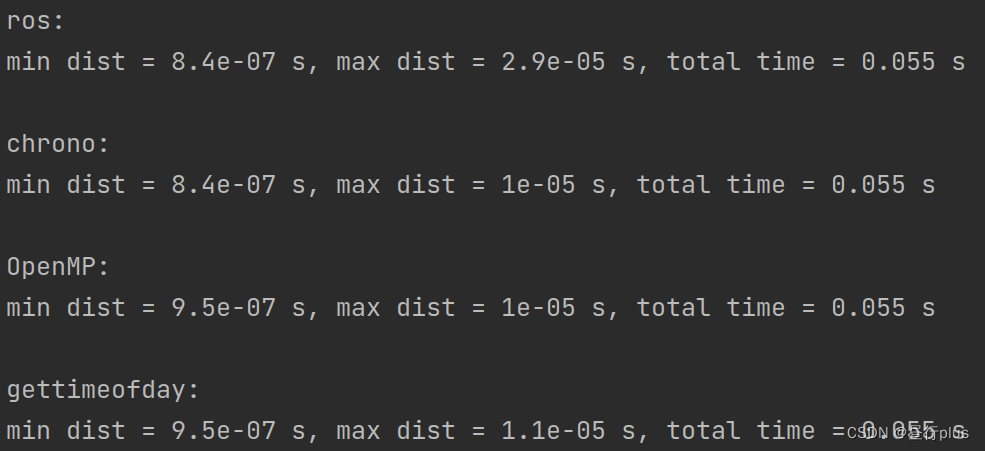
经过我的多次实验,ros和chrono的最小时间间隔一般最小,但ros的最大时间间隔一般最大, 其他三种方法的表现相差不大。
测试1
//
// Created by daybeha on 2022/6/27.
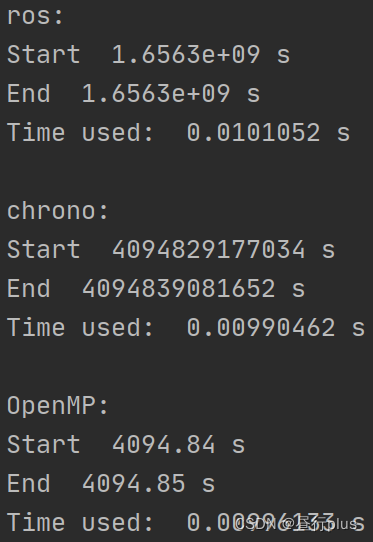
//#include rate=100Hz
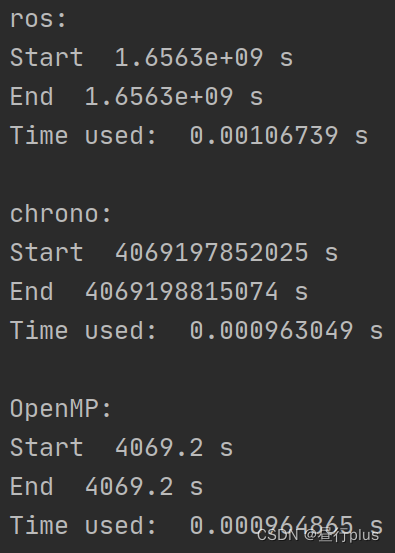
rate=1000Hz
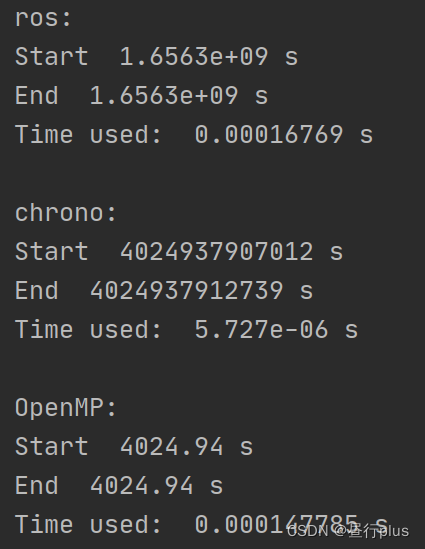
rate=10000Hz
rate=50000Hz
rate=100000Hz
可以看到,随着频率增大,三种方法的时间都不怎么准了(当然r.sleep应该也不准了……),其中chrono最差。 ros整体耗时更高。
测试2
//
// Created by daybeha on 2022/6/27.
//#include 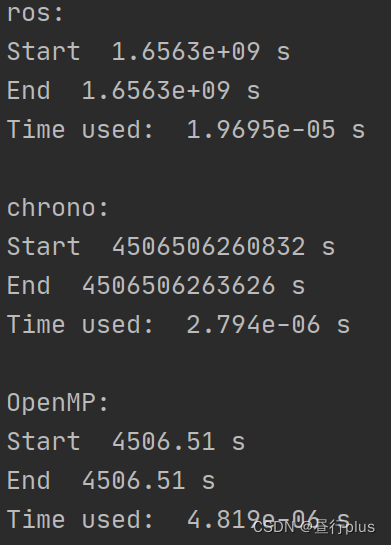
结论: chrono获取时间的效率最高,OpenMP其次,ros最差!
python版可以参考另一篇文章:学习笔记 —— python代码耗时及内存占用测试方法 以及一些零碎的python小工具
Reference
C++ API文档
ROS与C++入门教程-Time(时间)
omp_get_wtime | Microsoft Docs
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!