MPU6050 运动终端 运动检测 终端引脚输出
做项目需要用到6050判断运动状态,设备不动的时候,系统部分休眠,运动的时候唤醒,查了网上的资料。
配置的运动中断: MPU_Read_Byte(GYRO_ADDRESS,INT_ENABLE,0x40); //#define MPU_INT_EN_REG 0X38 //中断使能寄存器 只配置了加速度中断
读取 :MPU_Read_Byte(MPU_INT_STA_REG); //#define MPU_INT_STA_REG 0X3A 中断状态寄存器
结果读出来的反应很不灵敏。
——————————————————————————————
后来改成 终端配置:配置的运动中断: MPU_Read_Byte(GYRO_ADDRESS,INT_ENABLE,0x50); //#define MPU_INT_EN_REG 0X38 //中断使能寄存器 置了运动中断和加速度中断
读取:MPU_Read_Byte(MOT_DETECT_STATUS);#define MOT_DETECT_STATUS 0x61 //运动状态寄存器
实测,反应灵敏,终端输出正常。
代码:
#define MPU6050_RA_MOT_THR 0X1F //加速度中断阈值寄存器
#define MPU6050_RA_MOT_DUR 0X20 //加速中断时间寄存器#define MPU6050_RA_ZRMOT_THR 0X21 //静止中断阈值寄存器
#define MPU6050_RA_ZRMOT_DUR 0X22 //静止中断时间寄存器#define MPU6050_RA_FF_DUR 0X1D //自由落体中断阈值寄存器
#define MPU6050_RA_FF_THR 0X1E //自由落体中断时间寄存器#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68void Free_Fall_Interrupt(void) //自由落体中断
{MPU_Write_Byte(MPU6050_RA_FF_THR,0x01); //自由落体阈值MPU_Write_Byte(MPU6050_RA_FF_DUR,0x01); //自由落体检测时间20ms 单位1ms 寄存器0X20
}
void Motion_Interrupt(void) //运动中断
{MPU_Write_Byte(MPU6050_RA_MOT_THR, 0x05); //运动阈值 MPU_Write_Byte(MPU6050_RA_MOT_DUR, 0x01); //检测时间20ms 单位1ms 寄存器0X20
}
void Zero_Motion_Interrupt(void) //静止中断
{MPU_Write_Byte(MPU6050_RA_ZRMOT_THR,0x20); //静止阈值MPU_Write_Byte(MPU6050_RA_ZRMOT_DUR,0x20); //静止检测时间20ms 单位1ms 寄存器0X20
}void MPU_INT_Init(void)
{Motion_Interrupt(); //运动中断MPU_Write_Byte(MPU_CFG_REG, 0x04); //配置外部引脚采样和DLPF数字低通滤波器MPU_Write_Byte(MPU_ACCEL_CFG_REG, 0x1C); //加速度传感器量程和高通滤波器配置 +-4g 分辨率 8193 LSB/gMPU_Write_Byte(MPU_INTBP_CFG_REG, 0X30); //INT引脚 中断时高电平,读取运动状态寄存器清中断MPU_Write_Byte(MPU_INT_EN_REG, 0x50); //中断使能寄存器 使能运动中断和加速度中断
}#define MOT_DETECT_STATUS 0x61 //运动状态寄存器
//在主循环里面读取运动状态寄存器,会清除中断,INT电平会变低
void main(int)
{
res = i2c_init(I2C_MASTER_2, 100); //初始化IIC总线if (res != 0){printf("IIC init error:%X\n", res);}printf("IIC init OK:%X\n", res);MPU_Write_Byte(MPU_PWR_MGMT1_REG, 0X80); //复位MPU6050osDelay(100);MPU_Write_Byte(MPU_PWR_MGMT1_REG, 0X00); //唤醒MPU6050MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dpsMPU_Set_Accel_Fsr(0); //加速度传感器,±2gMPU_Set_Rate(50); //设置采样率50HzMPU_Write_Byte(MPU_INT_EN_REG, 0X40); //开启运动检测中断MPU_Write_Byte(MPU_USER_CTRL_REG, 0X00); //I2C主模式关闭MPU_Write_Byte(MPU_FIFO_EN_REG, 0X00); //关闭FIFOMPU_Write_Byte(MPU_INTBP_CFG_REG, 0X80); //INT引脚高电平有效res = MPU_Read_Byte(MPU_DEVICE_ID_REG);//读取MPU6050地址printf("MPU_DEVICE_ID_REG = %x\n", res);if (res == MPU_ADDR) //器件ID正确{MPU_INT_Init();}while(1){res = MPU_Read_Byte(MOT_DETECT_STATUS);cm_printf("MOT_DETECT_STATUS = %d\n", res);delay(1000);}
}摘出来的用到的寄存器和部分代码,有疑问的小伙伴可以私信我~
——————————————————————————————
中断使能寄存器:INT_ENABLE (这是从网友那里看的,点击进入链接)
| 寄存器名 | 助记符 | 寄存器地址 |
|---|---|---|
| 中断使能寄存器 | INT_ENABLE | x38 |
| 寄存器位 | 功能 |
|---|---|
| bit7 | 自由落体中断使能 |
| bit6 | 加速度中断使能 |
| bit5 | 静止中断使能 |
| bit4 | 运动检测中断使能 |
| bit3 | FIFO溢出中断使能 |
| bit2 | 无定义 |
| bit1 | 无定义 |
| bit0 | 数据就绪中断使能 |
MPU6060的手册的寄存器表:
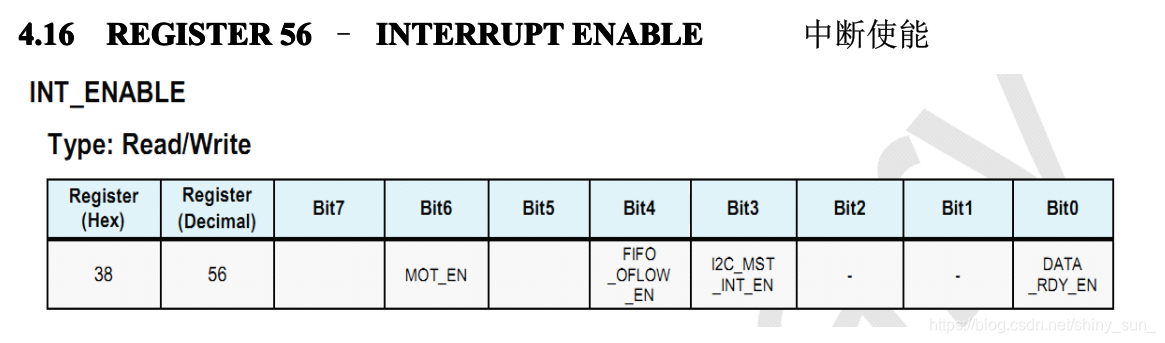
当时按照网友的寄存器说明就写了,也没啥问题。
@wxan1989 按照官方手册,需要设置成0X40.
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!