基于tm4c123g的无人机控制系统设计
本设计采用了基于TIVA系列处理器的设计方案,从硬件和软件分别进行设计。
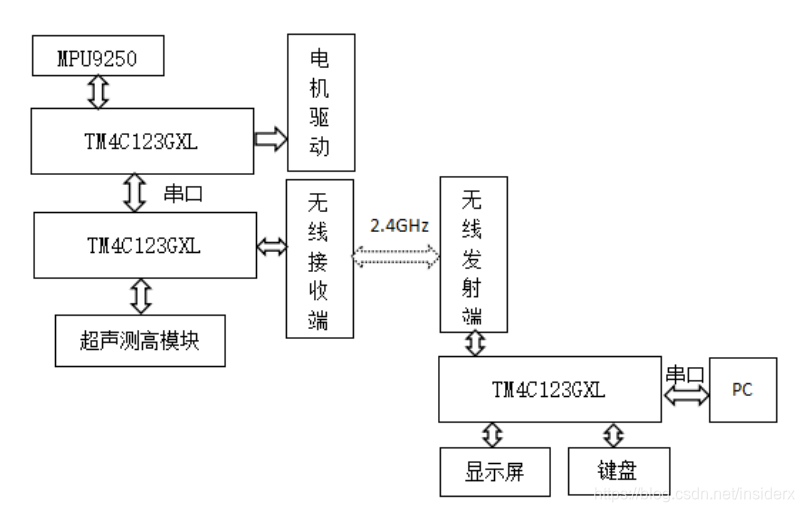
整个系统主要分为飞行器和遥控器两部分,主控模块均选用基于ARM Corte-M4F的EK-TM4C123GXL开发板。设计中利用九轴姿态传感器MPU9250进行姿态检测,再通过四元数AHRS姿态解算得到欧拉角,然后结合串级PID控制器对电机实行驱动,完成了四旋翼飞行器的在低空的自稳和悬停任务。同时可以利用基于NRF24L01无线通信模块的遥控器对飞行器进行命令的发送以及接收传回的数据,实现了与飞行器的数据通信。
整体的结构框图如下图所示:
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!