Raspberry Codesys RunTime控制Ethercat 伺服电机
Raspberry Codesys RunTime控制Ethercat 伺服电机
- 准备的材料
- 安装设备描述文件
- 创建项目
- 设备组态
- 编写PLC程序
- 调试
准备的材料
1.带Ecat总线的伺服一套
2.带Codesys RunTime的控制器
3.网线一根
安装设备描述文件
菜单栏电机“工具”->“设备存储库”
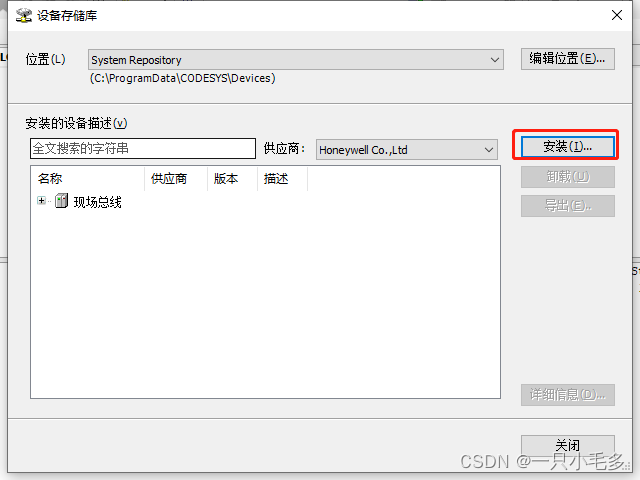
选择相对应的描述文件后缀,再选择描述文件,点击打开即可安装

创建项目
“文件”->“新建工程”->选择“标准项目”,点击确定
设备选择第二个

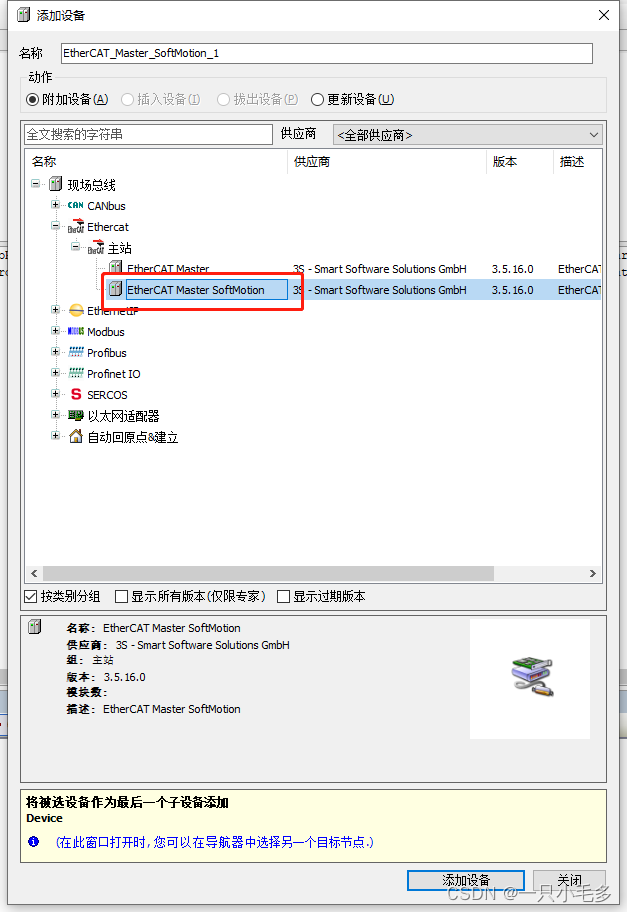
设备组态
右击Device,选择添加设备

选择第二个,点击添加设备
更改源地址
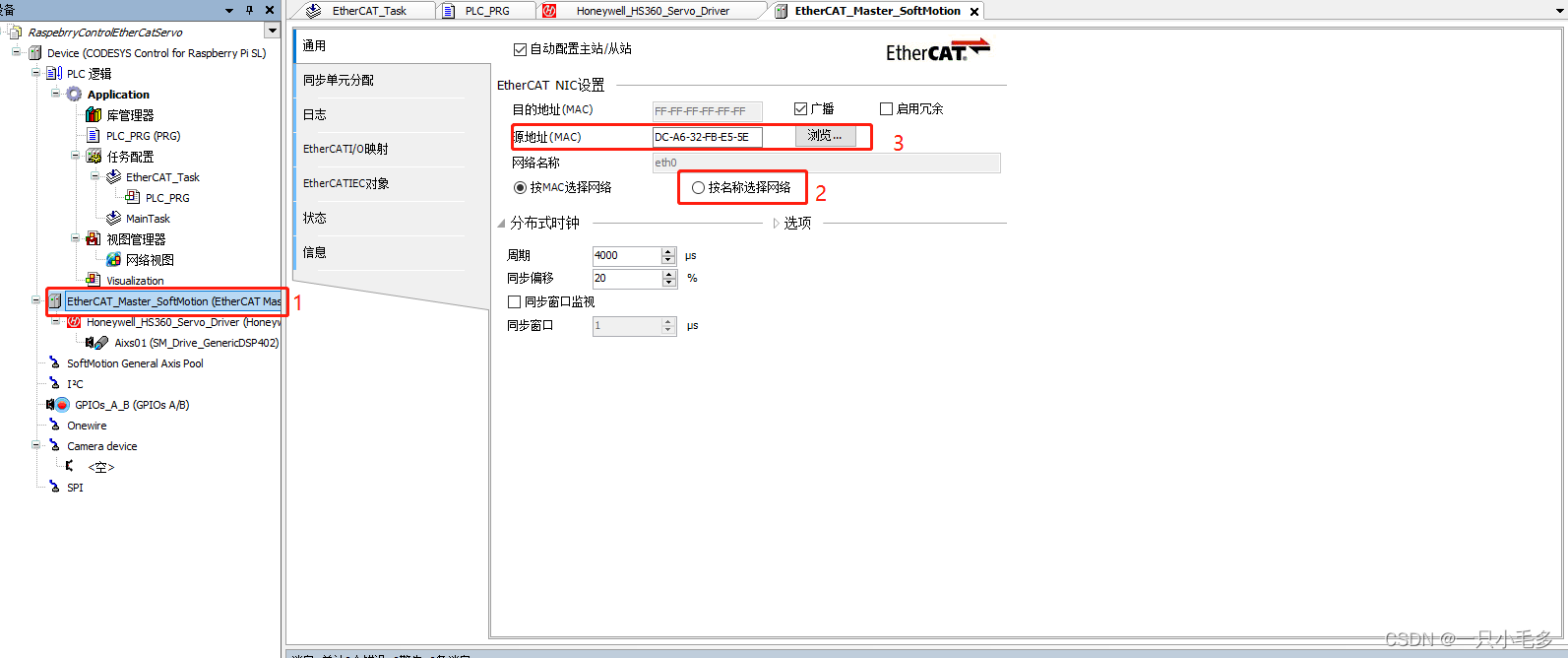

双击“Device”,点击“扫描网络”,选择扫描出来的设备
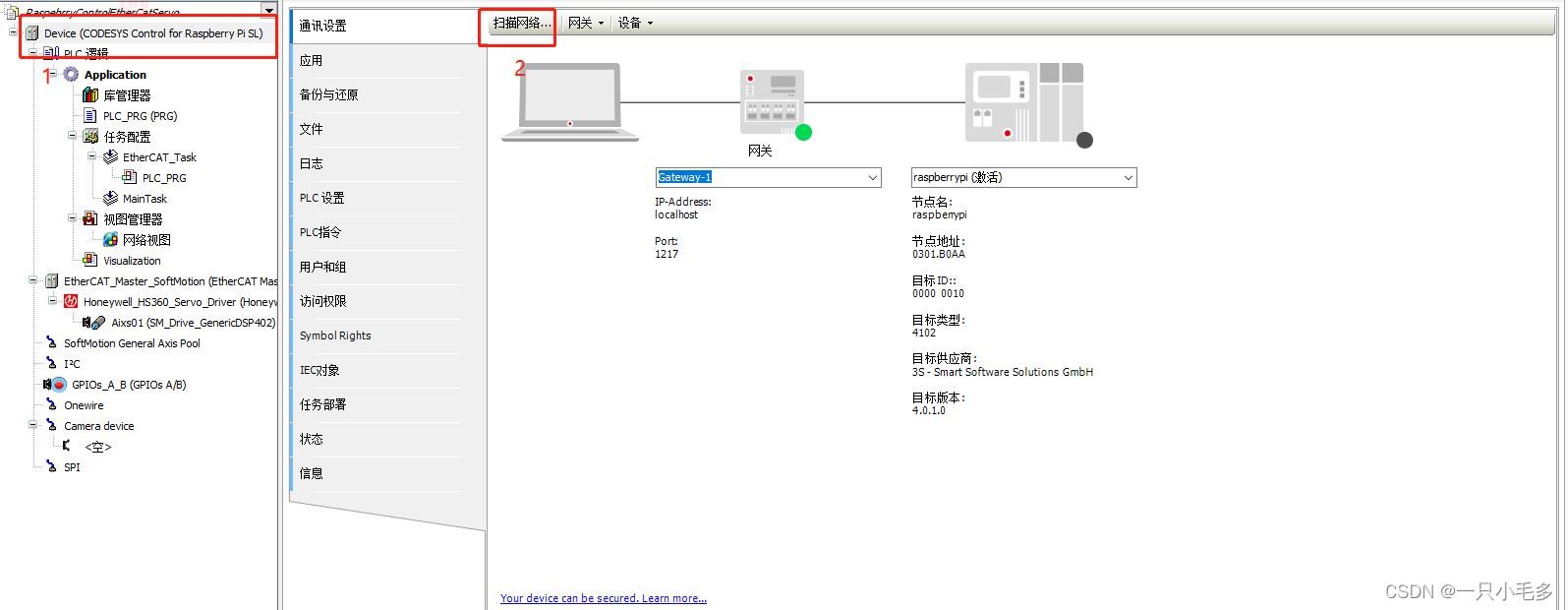
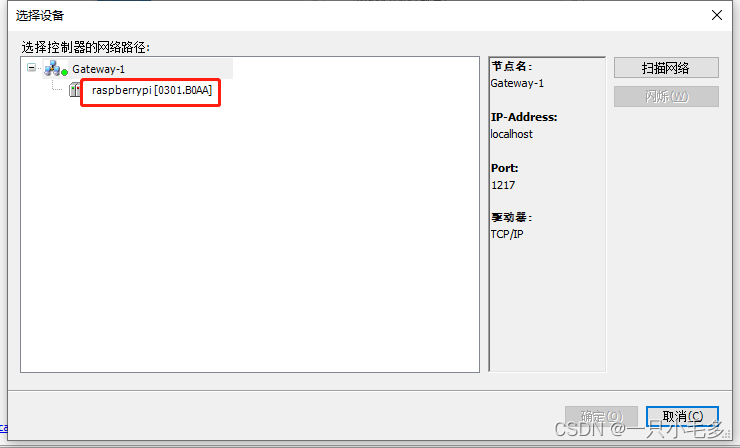
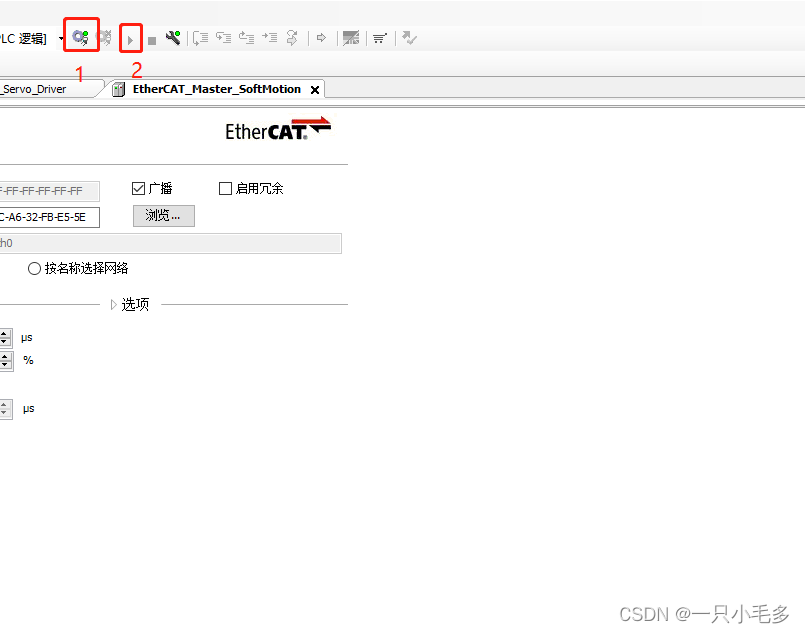
点击登录到设备,然后点击运行
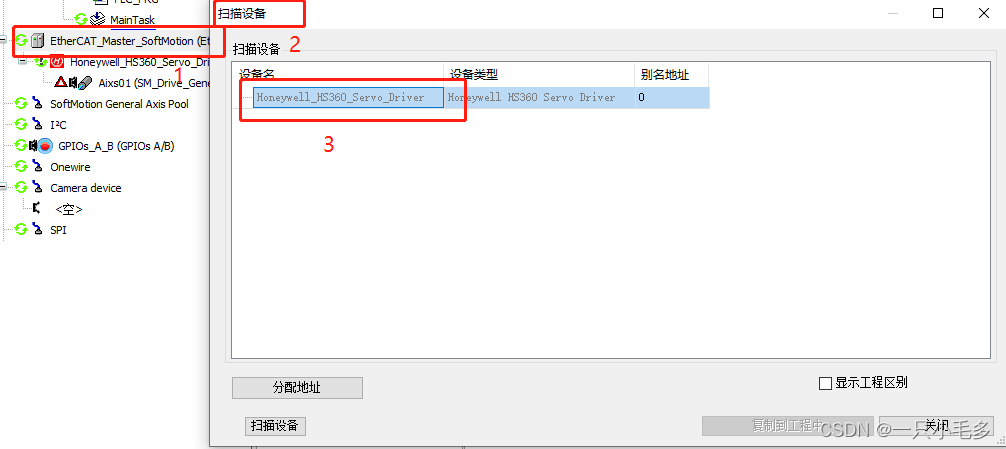
右击标号1处,选择“扫描设备”,点击复制工程到工程。
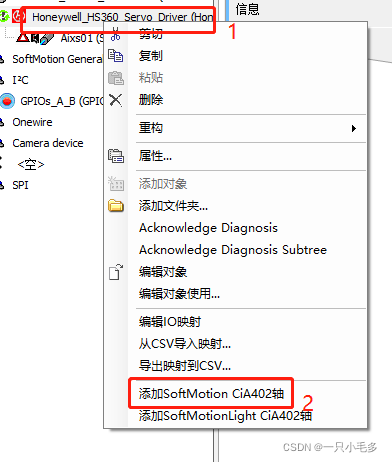
退出登录状态,然后添加轴
更改总线循环任务
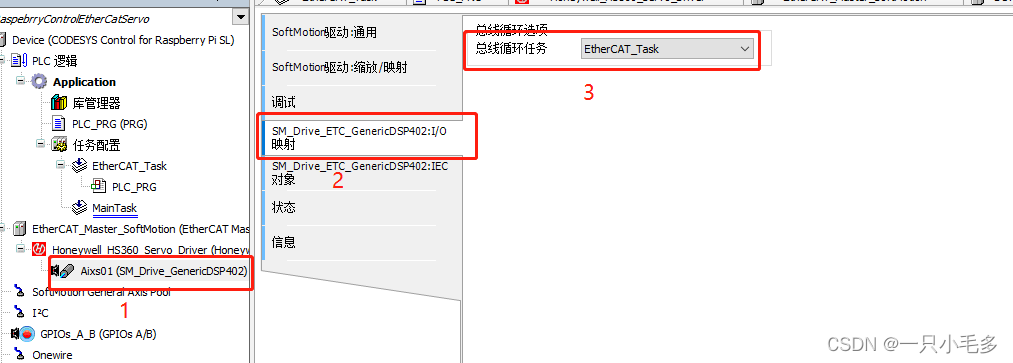
将PLC_PRG从MainTask移动到EtherCAT_Task下

将优先级设置为0

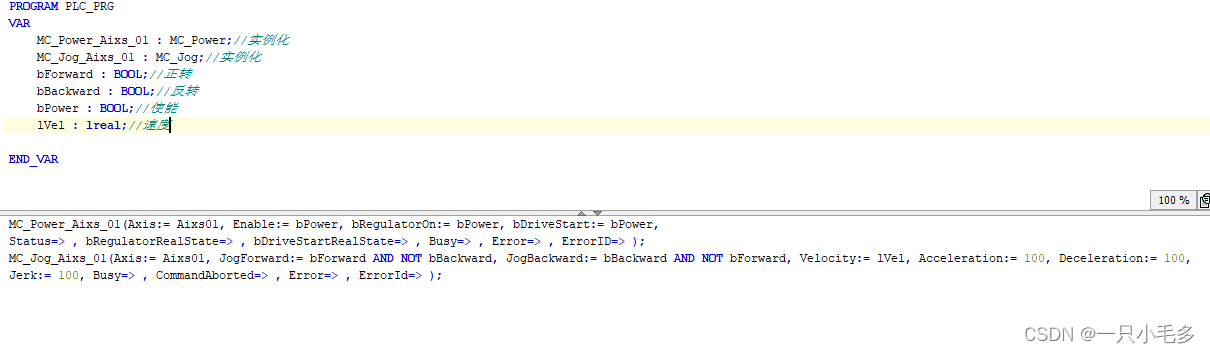
编写PLC程序
调试
更改速度值,双击更改速度值,更改后按住Ctrl+F7确认。
双击更改bPower为True,按住Ctrl+F7确认。
更改正反转布尔量值,按住Ctrl+F7确认。

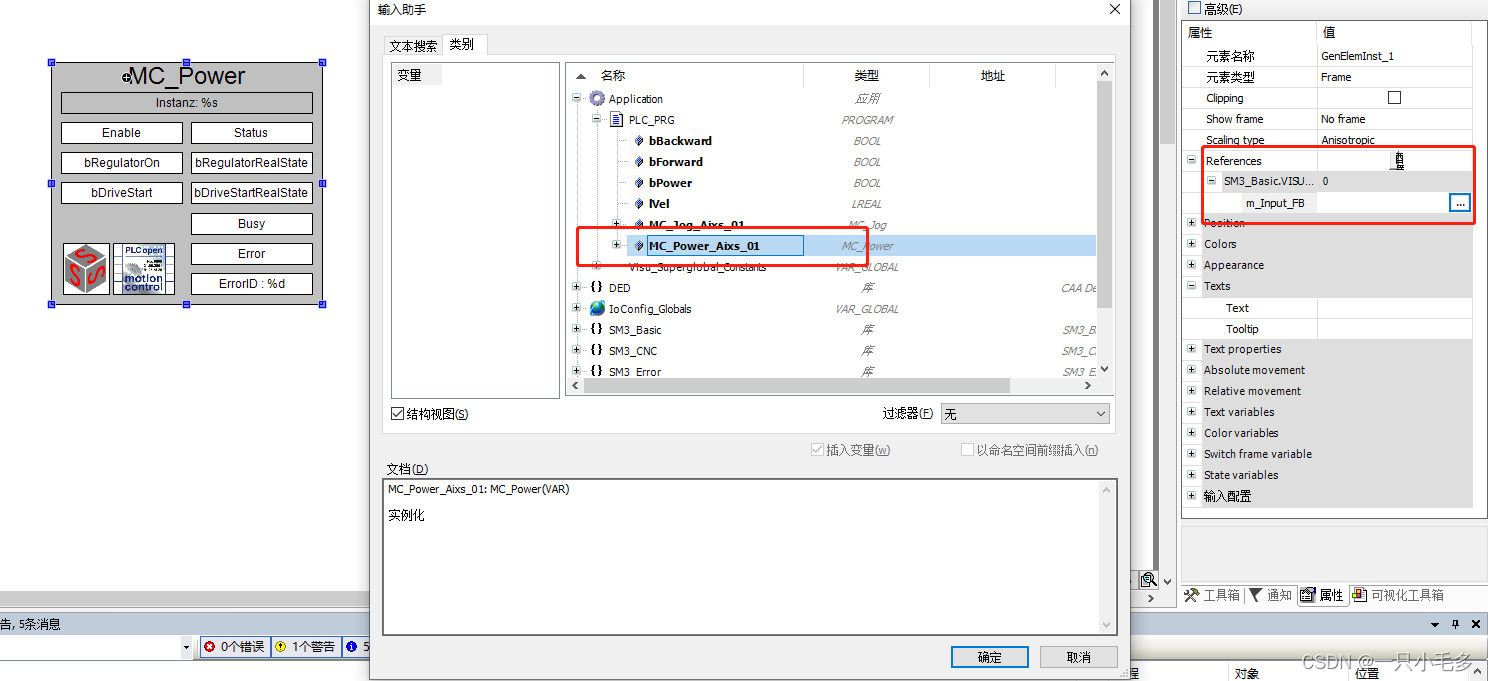
也可以在视图里添加块来实现
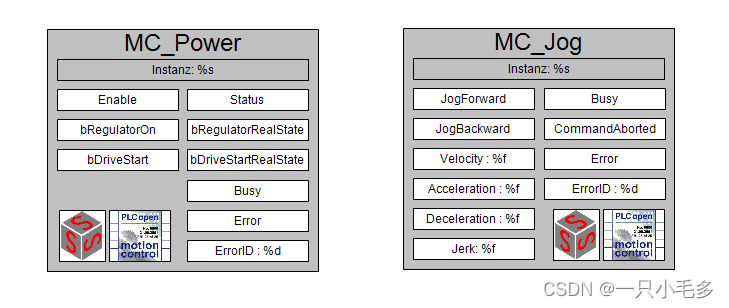
分别对应上两个实例,之前的上电变量和正反转变量可以删除。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!