红外遥控智能小车
【STM32 .Net MF开发板学习-15】红外遥控智能小车
热29 已有 620 次阅读 2010-09-28 23:06 [顶]3G移动--Android开发工程师全能班 我前段时间写了《用PWM驱动智能小车》和《红外遥控器编码识别》两篇博文,分别介绍了如何用PWM驱动直流电机及红外遥控器编码识别,这一次我们把二者结合起来,用红外遥控器遥控智能小车。
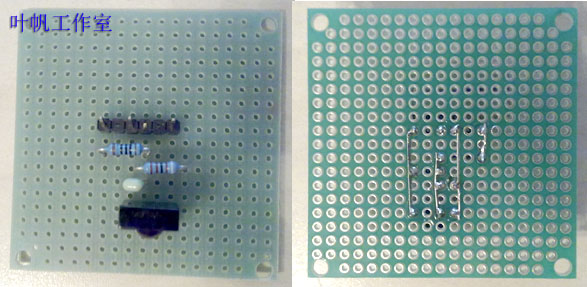
在《红外遥控器编码识别》中,我们用面包板搭建简单的电路,来验证红外接收信号,但是放在小车上是不行的,相关器件我们需要进行焊接,最终完成图如下。
我们把智能小车和红外板拼装在一起,最终完成图如下:
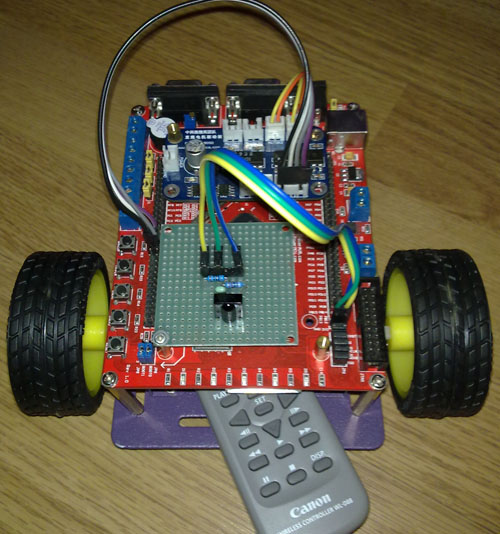
需要注意的是,PWM信号输出时,对红外接收信号有比较大的干扰,所以尽可能让两路信号离的远一些,杜邦线质量也要好一些。
我们把小车分5种状态:前进、后退、左转、右转、停止
1、 前进代码
static void MoveForward()
{
Lc.Write(true);
pwm.Start(PWM.Channels.CH1, 1, PWM.Mode.PWM1); //PA6
Rc.Write(true);
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!