机器学习笔记之近似推断(二)推断的核心思想
机器学习笔记之近似推断——推断的核心思想
- 引言
- 回顾:推断的目的与困难
- 推断的目的
- 推断的困难
- 推断的核心思想——优化
引言
上一节介绍了从深度学习的角度介绍了推断,并介绍了推断的目的和困难。本节将继续介绍推断的核心思想。
回顾:推断的目的与困难
推断的目的
推断不仅局限于深度生成模型。实际上,所有基于概率图结构的模型,特别是基于隐变量的概率图模型,都需要推断任务。推断的目的主要包含两种情况:
- 推断自身就是推断的目的。也就是说,推断本身就是处理相关任务的一个结果。例如以隐马尔可夫模型为核心的动态模型( Dynamic Model \text{Dynamic Model} Dynamic Model)。
基于齐次马尔可夫假设与观测独立性假设下的动态模型,其模型内部的随机变量结点存在严格限制:
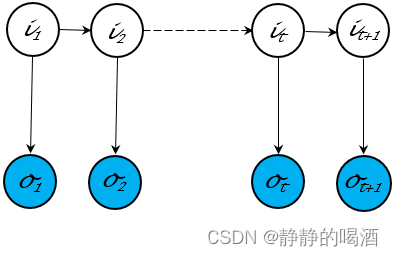
在这种确定结构下的推断任务多种多样。如解码任务( Decoding \text{Decoding} Decoding)——维特比算法( Viterbi \text{Viterbi} Viterbi),求值问题——前向算法( Forward Algorithm \text{Forward Algorithm} Forward Algorithm)等等,这些任务本身就是推断任务的目标。 - 模型学习任务中需要推断。例如 EM \text{EM} EM算法( Expectation Maximization,EM \text{Expectation Maximization,EM} Expectation Maximization,EM)在参数迭代的过程中,要对隐变量的后验概率 P ( Z ∣ X ) \mathcal P(\mathcal Z \mid \mathcal X) P(Z∣X)进行计算/近似计算:
下面公式中分别描述'狭义EM算法'与‘广义EM算法’中E步的表示。
{ log P ( X ; θ ) = ELBO ⇔ Q ( Z ) = P ( Z ∣ X ) Q ^ ( t + 1 ) ( Z ) = arg max Q ( Z ) ELBO ⇔ Q ( Z ) ≈ P ( Z ∣ X ) \begin{cases} \log \mathcal P(\mathcal X;\theta) = \text{ELBO} \Leftrightarrow \mathcal Q(\mathcal Z) = \mathcal P(\mathcal Z \mid \mathcal X) \\ \quad \\ \hat {\mathcal Q}^{(t+1)}(\mathcal Z) = \mathop{\arg\max}\limits_{\mathcal Q(\mathcal Z)} \text{ELBO} \Leftrightarrow \mathcal Q(\mathcal Z) \approx \mathcal P(\mathcal Z \mid \mathcal X) \end{cases} ⎩ ⎨ ⎧logP(X;θ)=ELBO⇔Q(Z)=P(Z∣X)Q^(t+1)(Z)=Q(Z)argmaxELBO⇔Q(Z)≈P(Z∣X)
并不是一上来就可以针对陌生的变量进行推断,必须要在模型给定,并且当前模型参数已知的情况下,才能够执行推断。
这个说法和‘模型学习任务中需要推断’并不冲突。除非是结构简单的模型,否则很难通过一次步骤直接得到参数的精确解。因此,通常是基于随机初始化的模型参数,通过若干次迭代得到参数最优解的近似解。例如广义EM算法的坐标上升法( Coordinate Ascent \text{Coordinate Ascent} Coordinate Ascent),再比如‘随机梯度变分推断’( Stochastic Gradient Variational Inference,SGVI \text{Stochastic Gradient Variational Inference,SGVI} Stochastic Gradient Variational Inference,SGVI)中的梯度上升法( Gradient Ascent,GA \text{Gradient Ascent,GA} Gradient Ascent,GA)等等。
推断的困难
推断困难的原因主要有两个:
-
随机变量的概率能够表示,但计算代价太大。依然以隐马尔可夫模型中的解码问题为例,它的目标可表示为如下形式:
I ^ = arg max I P ( I ∣ O ; λ ) \hat {\mathcal I} = \mathop{\arg\max}\limits_{\mathcal I} \mathcal P(\mathcal I \mid \mathcal O;\lambda) I^=IargmaxP(I∣O;λ)
其中 I \mathcal I I表示基于时间/序列的随机变量集合: I = { i 1 , i 2 , ⋯ , i T } \mathcal I = \{i_1,i_2,\cdots,i_T\} I={i1,i2,⋯,iT},假设每一个随机变量 i t ( t = 1 , 2 , ⋯ , T ) i_t(t=1,2,\cdots,T) it(t=1,2,⋯,T)均属于离散型随机变量:
i t = q k ( q k ∈ Q = { q 1 , q 2 , ⋯ , q K } ) i_t = q_k(q_k\in \mathcal Q = \{q_1,q_2,\cdots,q_{\mathcal K}\}) it=qk(qk∈Q={q1,q2,⋯,qK})
那么随机变量集合 I \mathcal I I可以得到 K T {\mathcal K}^T KT种不重复的状态序列组合。而最终目标仅需要一个最优组合:
I ^ = { i ^ 1 , i ^ 2 , ⋯ , i ^ T } \hat {\mathcal I} = \{\hat {i}_1,\hat i_2,\cdots,\hat i_{T}\} I^={i^1,i^2,⋯,i^T}
如果将所有序列组合全部求解出来去比较,这个计算代价极大。因而可采用维特比算法这种基于贪心策略的方法进行求解。 -
由于随机变量之间关系过于复杂,导致随机变量的概率根本无法表示。玻尔兹曼机( Boltzmann Machine \text{Boltzmann Machine} Boltzmann Machine)就是一个典型的例子。玻尔兹曼机中观测变量、隐变量内部可能存在关联关系,这种结构导致后验概率 P ( Z ∣ X ) \mathcal P(\mathcal Z \mid \mathcal X) P(Z∣X)没有办法精准地梳理开。
当然,Hinton \text{Hinton} Hinton老爷子也给出了一种基于MCMC \text{MCMC} MCMC的求解方式。假设观测变量集合 V \mathcal V V与隐变量集合 H \mathcal H H 分别表示如下:
{ H = { h 1 , h 2 , ⋯ , h m } V = { v 1 , v 2 , ⋯ , v n } \begin{cases} \mathcal H = \{h_1,h_2,\cdots,h_m\} \\ \mathcal V = \{v_1,v_2,\cdots,v_n\} \end{cases} {H={h1,h2,⋯,hm}V={v1,v2,⋯,vn}
那么某一隐变量 h j ( j ∈ { 1 , 2 , ⋯ , m } ) h_j(j \in \{1,2,\cdots,m\}) hj(j∈{1,2,⋯,m})的后验概率分布可表示为:
推导过程详见玻尔兹曼机—— MCMC \text{MCMC} MCMC求解后验概率,就是因为h j h_j hj和h − j h_{-j} h−j存在关联关系,才导致P ( h j ∣ V ) ≈ P ( h j ∣ V , h − j ) \mathcal P(h_j \mid \mathcal V) \approx \mathcal P(h_j \mid \mathcal V,h_{-j}) P(hj∣V)≈P(hj∣V,h−j)的近似操作。
P ( h j ∣ V , h − j ) = P ( h j , V , h − j ) P ( h − j , V ) = P ( H , V ) ∑ h j P ( H , V ) h − j = ( h 1 , ⋯ , h j − 1 , h j + 1 , ⋯ , h m ) \begin{aligned} \mathcal P(h_j \mid \mathcal V,h_{-j}) & = \frac{\mathcal P(h_j,\mathcal V,h_{-j})}{\mathcal P(h_{-j},\mathcal V)} \\ & = \frac{\mathcal P(\mathcal H,\mathcal V)}{\sum_{h_j}\mathcal P(\mathcal H,\mathcal V)} \quad h_{-j} = (h_1,\cdots,h_{j-1},h_{j+1},\cdots,h_m) \end{aligned} P(hj∣V,h−j)=P(h−j,V)P(hj,V,h−j)=∑hjP(H,V)P(H,V)h−j=(h1,⋯,hj−1,hj+1,⋯,hm)
推断的核心思想——优化
推断的推导过程在 EM \text{EM} EM算法、变分推断过程中已经详细地介绍过。其底层逻辑就是:将隐变量的后验概率求解问题 转化成优化问题,即基于极大似然估计,将观测变量(样本)的对数似然函数( log-likelihood \text{log-likelihood} log-likelihood) log P ( V ) \log \mathcal P(\mathcal V) logP(V)转化成证据下界 ELBO \text{ELBO} ELBO + KL \text{KL} KL散度,并最大化 ELBO \text{ELBO} ELBO的问题:
-
已知样本集合 V \mathcal V V包含 N N N个样本,并包含 n n n个随机变量:
V = { v ( i ) } i = 1 N v ( i ) = ( v 1 ( i ) , v 2 ( i ) , ⋯ , v n ( i ) ) T \mathcal V = \{v^{(i)}\}_{i=1}^N \quad v^{(i)} = (v_1^{(i)},v_2^{(i)},\cdots,v_n^{(i)})^T V={v(i)}i=1Nv(i)=(v1(i),v2(i),⋯,vn(i))T -
关于观测变量集合 V \mathcal V V的对数似然函数 log P ( V ) \log \mathcal P(\mathcal V) logP(V)可表示为如下形式:
样本之间‘独立同分布’。在配分函数——对数似然梯度中提到,可以在最前面乘以一个常数项1 N \frac{1}{N} N1,即1 N ∑ i = 1 N log P ( v ( i ) ) \frac{1}{N}\sum_{i=1}^N \log \mathcal P(v^{(i)}) N1∑i=1NlogP(v(i))。
该常数项本身恒正,在极大似然估计求解过程中并不会产生影响。但从蒙特卡洛方法( Monte Carlo Method \text{Monte Carlo Method} Monte Carlo Method)逆向推导的思路中可以观察到,它明显是一个期望:1 N ∑ i = 1 N log P ( v ( i ) ) ≈ E v ( i ) ∼ P d a t a [ log P ( v ( i ) ) ] \frac{1}{N} \sum_{i=1}^N \log \mathcal P(v^{(i)}) \approx \mathbb E_{v^{(i)} \sim \mathcal P_{data}} \left[\log \mathcal P(v^{(i)})\right] N1∑i=1NlogP(v(i))≈Ev(i)∼Pdata[logP(v(i))],其中P d a t a \mathcal P_{data} Pdata表示真实样本分布。
log P ( V ) = log [ ∏ i = 1 N P ( v ( i ) ) ] = ∑ i = 1 N log P ( v ( i ) ) \begin{aligned} \log \mathcal P(\mathcal V) & = \log \left[\prod_{i=1}^N \mathcal P(v^{(i)})\right] \\ & = \sum_{i=1}^N \log \mathcal P(v^{(i)}) \end{aligned} logP(V)=log[i=1∏NP(v(i))]=i=1∑NlogP(v(i))
-
继续观察关于某个样本 v ( i ) v^{(i)} v(i)的对数似然函数 log P ( v ( i ) ) \log \mathcal P(v^{(i)}) logP(v(i))是如何分解的。
基于贝叶斯定理,引入观测变量 v ( i ) v^{(i)} v(i)对应模型的隐变量 h ( i ) h^{(i)} h(i),可将 log P ( v ( i ) ) \log \mathcal P(v^{(i)}) logP(v(i))表示成如下形式:
log P ( v ( i ) ) = log [ P ( v ( i ) , h ( i ) ) P ( h ( i ) ∣ v ( i ) ) ] \log \mathcal P(v^{(i)}) = \log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal P(h^{(i)} \mid v^{(i)})}\right] logP(v(i))=log[P(h(i)∣v(i))P(v(i),h(i))]
引入一个人为设定的分布 Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i)),并将其转化为如下形式:需要注意的是,这个分布Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i))是一个以v ( i ) v^{(i)} v(i)为条件的后验概率分布。将log P ( v ( i ) ) \log \mathcal P(v^{(i)}) logP(v(i))使用I \mathcal I I进行替代。
I = log [ P ( v ( i ) , h ( i ) ) Q ( h ( i ) ∣ v ( i ) ) ⋅ Q ( h ( i ) ∣ v ( i ) ) P ( h ( i ) ∣ v ( i ) ) ] = log [ P ( v ( i ) , h ( i ) ) Q ( h ( i ) ∣ v ( i ) ) ] + log [ Q ( h ( i ) ∣ v ( i ) ) P ( h ( i ) ∣ v ( i ) ) ] \begin{aligned} \mathcal I & = \log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal Q(h^{(i)} \mid v^{(i)})} \cdot \frac{\mathcal Q(h^{(i)} \mid v^{(i)})}{\mathcal P(h^{(i)} \mid v^{(i)})}\right] \\ & = \log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal Q(h^{(i)} \mid v^{(i)})}\right] + \log \left[\frac{\mathcal Q(h^{(i)} \mid v^{(i)})}{\mathcal P(h^{(i)} \mid v^{(i)})}\right] \end{aligned} I=log[Q(h(i)∣v(i))P(v(i),h(i))⋅P(h(i)∣v(i))Q(h(i)∣v(i))]=log[Q(h(i)∣v(i))P(v(i),h(i))]+log[P(h(i)∣v(i))Q(h(i)∣v(i))]
观察第一项 log [ P ( v ( i ) , h ( i ) ) Q ( h ( i ) ∣ v ( i ) ) ] \log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal Q(h^{(i)} \mid v^{(i)})}\right] log[Q(h(i)∣v(i))P(v(i),h(i))]和 log P ( v ( i ) ) = log [ P ( v ( i ) , h ( i ) ) P ( h ( i ) ∣ v ( i ) ) ] \log \mathcal P(v^{(i)}) =\log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal P(h^{(i)} \mid v^{(i)})}\right] logP(v(i))=log[P(h(i)∣v(i))P(v(i),h(i))]之间,可以将其理解成:人为设定分布 Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i))替代了 P ( h ( i ) ∣ v ( i ) ) \mathcal P(h^{(i)} \mid v^{(i)}) P(h(i)∣v(i))分布的位置;而 log [ Q ( h ( i ) ∣ v ( i ) ) P ( h ( i ) ∣ v ( i ) ) ] \log \left[\frac{\mathcal Q(h^{(i)} \mid v^{(i)})}{\mathcal P(h^{(i)} \mid v^{(i)})}\right] log[P(h(i)∣v(i))Q(h(i)∣v(i))]可理解为:分布 Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i))与分布 P ( h ( i ) ∣ v ( i ) ) \mathcal P(h^{(i)} \mid v^{(i)}) P(h(i)∣v(i))之间存在的某种关联关系。
分别对等式两端基于 Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i))求解积分:
其中I \mathcal I I中不包含h ( i ) h^{(i)} h(i),因而有∫ h ( i ) I ⋅ Q ( h ( i ) ∣ v ( i ) ) d h ( i ) = I ∫ h ( i ) Q ( h ( i ) ∣ v ( i ) ) d h ( i ) = I ⋅ 1 = I \int_{h^{(i)}} \mathcal I \cdot \mathcal Q(h^{(i)} \mid v^{(i)}) dh^{(i)} = \mathcal I \int_{h^{(i)}} \mathcal Q(h^{(i)} \mid v^{(i)}) dh^{(i)} = \mathcal I \cdot 1 = \mathcal I ∫h(i)I⋅Q(h(i)∣v(i))dh(i)=I∫h(i)Q(h(i)∣v(i))dh(i)=I⋅1=I(概率密度积分),因而关注点在等式右侧的积分过程。
I = ∫ h ( i ) Q ( h ( i ) ∣ v ( i ) ) log [ P ( v ( i ) , h ( i ) ) Q ( h ( i ) ∣ v ( i ) ) ] d h ( i ) + ∫ h ( i ) Q ( h ( i ) ∣ v ( i ) ) log [ Q ( h ( i ) ∣ v ( i ) ) P ( h ( i ) ∣ v ( i ) ) ] d h ( i ) = E Q ( h ( i ) ∣ v ( i ) ) { log [ P ( v ( i ) , h ( i ) ) Q ( h ( i ) ∣ v ( i ) ) ] } ⏟ Evidence of Lower Bound,ELBO + KL [ Q ( h ( i ) ∣ v ( i ) ) ∣ ∣ P ( h ( i ) ∣ v ( i ) ) ] ⏟ KL Divergence \begin{aligned} \mathcal I & = \int_{h^{(i)}} \mathcal Q(h^{(i)} \mid v^{(i)}) \log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal Q(h^{(i)} \mid v^{(i)})}\right] d h^{(i)} + \int_{h^{(i)}} \mathcal Q(h^{(i)} \mid v^{(i)}) \log \left[\frac{\mathcal Q(h^{(i)} \mid v^{(i)})}{\mathcal P(h^{(i)} \mid v^{(i)})}\right] dh^{(i)} \\ & = \underbrace{\mathbb E_{\mathcal Q(h^{(i)} \mid v^{(i)})} \left\{\log \left[\frac{\mathcal P(v^{(i)},h^{(i)})}{\mathcal Q(h^{(i)} \mid v^{(i)})}\right]\right\}}_{\text{Evidence of Lower Bound,ELBO}} + \underbrace{\text{KL} \left[\mathcal Q(h^{(i)} \mid v^{(i)}) || \mathcal P(h^{(i)} \mid v^{(i)})\right]}_{\text{KL Divergence}} \end{aligned} I=∫h(i)Q(h(i)∣v(i))log[Q(h(i)∣v(i))P(v(i),h(i))]dh(i)+∫h(i)Q(h(i)∣v(i))log[P(h(i)∣v(i))Q(h(i)∣v(i))]dh(i)=Evidence of Lower Bound,ELBO EQ(h(i)∣v(i)){log[Q(h(i)∣v(i))P(v(i),h(i))]}+KL Divergence KL[Q(h(i)∣v(i))∣∣P(h(i)∣v(i))]
可以将 ELBO \text{ELBO} ELBO继续向下分解,得到如下形式:
I = E Q ( h ( i ) ∣ v ( i ) ) [ log P ( v ( i ) , h ( i ) ) − log Q ( h ( i ) ∣ v ( i ) ) ] + KL [ Q ( h ( i ) ∣ v ( i ) ) ∣ ∣ P ( h ( i ) ∣ v ( i ) ) ] = E Q ( h ( i ) ∣ v ( i ) ) [ log P ( v ( i ) , h ( i ) ) ] − E Q ( h ( i ) ∣ v ( i ) ) [ Q ( h ( i ) ∣ v ( i ) ) ] ⏟ H [ Q ( h ( i ) ∣ v ( i ) ) ] ; Entropy + KL [ Q ( h ( i ) ∣ v ( i ) ) ∣ ∣ P ( h ( i ) ∣ v ( i ) ) ] \begin{aligned} \mathcal I & = \mathbb E_{\mathcal Q(h^{(i)} \mid v^{(i)})} \left[\log \mathcal P(v^{(i)},h^{(i)}) - \log \mathcal Q(h^{(i)} \mid v^{(i)})\right] + \text{KL} \left[\mathcal Q(h^{(i)} \mid v^{(i)}) || \mathcal P(h^{(i)} \mid v^{(i)})\right] \\ & = \mathbb E_{\mathcal Q(h^{(i)} \mid v^{(i)})} \left[\log \mathcal P(v^{(i)},h^{(i)})\right] \underbrace{- \mathbb E_{\mathcal Q(h^{(i)} \mid v^{(i)})} \left[\mathcal Q(h^{(i)} \mid v^{(i)})\right]}_{\mathcal H[\mathcal Q(h^{(i)} \mid v^{(i)})];\text{Entropy}} + \text{KL} \left[\mathcal Q(h^{(i)} \mid v^{(i)}) || \mathcal P(h^{(i)} \mid v^{(i)})\right] \end{aligned} I=EQ(h(i)∣v(i))[logP(v(i),h(i))−logQ(h(i)∣v(i))]+KL[Q(h(i)∣v(i))∣∣P(h(i)∣v(i))]=EQ(h(i)∣v(i))[logP(v(i),h(i))]H[Q(h(i)∣v(i))];Entropy −EQ(h(i)∣v(i))[Q(h(i)∣v(i))]+KL[Q(h(i)∣v(i))∣∣P(h(i)∣v(i))] -
最终,对数似然函数 log P ( V ) \log \mathcal P(\mathcal V) logP(V)可表示为:
log P ( V ) = ∑ i = 1 N I = ∑ i = 1 N { E Q ( h ( i ) ∣ v ( i ) ) [ log P ( v ( i ) , h ( i ) ) ] − E Q ( h ( i ) ∣ v ( i ) ) [ Q ( h ( i ) ∣ v ( i ) ) ] ⏟ H [ Q ( h ( i ) ∣ v ( i ) ) ] ; Entropy + KL [ Q ( h ( i ) ∣ v ( i ) ) ∣ ∣ P ( h ( i ) ∣ v ( i ) ) ] } \begin{aligned} \log \mathcal P(\mathcal V) & = \sum_{i=1}^N \mathcal I \\ & = \sum_{i=1}^N \left\{\mathbb E_{\mathcal Q(h^{(i)} \mid v^{(i)})} \left[\log \mathcal P(v^{(i)},h^{(i)})\right] \underbrace{- \mathbb E_{\mathcal Q(h^{(i)} \mid v^{(i)})} \left[\mathcal Q(h^{(i)} \mid v^{(i)})\right]}_{\mathcal H[\mathcal Q(h^{(i)} \mid v^{(i)})];\text{Entropy}} + \text{KL} \left[\mathcal Q(h^{(i)} \mid v^{(i)}) || \mathcal P(h^{(i)} \mid v^{(i)})\right]\right\} \end{aligned} logP(V)=i=1∑NI=i=1∑N⎩ ⎨ ⎧EQ(h(i)∣v(i))[logP(v(i),h(i))]H[Q(h(i)∣v(i))];Entropy −EQ(h(i)∣v(i))[Q(h(i)∣v(i))]+KL[Q(h(i)∣v(i))∣∣P(h(i)∣v(i))]⎭ ⎬ ⎫
根据极大似然估计,将推断任务:求解 P ( h ( i ) ∣ v ( i ) ) \mathcal P(h^{(i)} \mid v^{(i)}) P(h(i)∣v(i))转换为了:- 使用 Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i))替代了 P ( h ( i ) ∣ v ( i ) ) \mathcal P(h^{(i)} \mid v^{(i)}) P(h(i)∣v(i));
- 选择合适的 Q ( h ( i ) ∣ v ( i ) ) \mathcal Q(h^{(i)} \mid v^{(i)}) Q(h(i)∣v(i))来优化目标函数,使得目标函数 ELBO = L [ v ( i ) , h ( i ) , Q ( h ( i ) ∣ v ( i ) ) ] \text{ELBO} = \mathcal L \left[v^{(i)},h^{(i)},\mathcal Q(h^{(i)} \mid v^{(i)})\right] ELBO=L[v(i),h(i),Q(h(i)∣v(i))]达到最大:
arg max Q ( h ( i ) ∣ v ( i ) ) L [ v ( i ) , h ( i ) , Q ( h ( i ) ∣ v ( i ) ) ] \mathop{\arg\max}\limits_{\mathcal Q(h^{(i)} \mid v^{(i)})} \mathcal L \left[v^{(i)},h^{(i)},\mathcal Q(h^{(i)} \mid v^{(i)})\right] Q(h(i)∣v(i))argmaxL[v(i),h(i),Q(h(i)∣v(i))]
相关参考:
(系列二十五)近似推断2-推断即优化
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!