矩阵于线性代数
矩阵于线性代数
虽然从本科开始就接触了线性代数,对于矩阵的理解却一直停留在书本的习题上,以至于后来很多跟矩阵相关的数学概念都没有能及时领悟。所以我想通过这篇文章对我再次学习矩阵的理解进行总结。个人觉得西方人对于矩阵的理解还是相对更好一些,因为教学更偏向于去理解如何将问题向量化,然后在用MATLAB或者PYTHON去计算结果。矩阵和向量在当今的大数据时代也更为重要。希望之后有时间可以把接下来学习过程中矩阵的应用分享到这里。
注:很多知识都来自于互联网(我不生产知识,我只是知识的搬运工),此篇博文参考Youtube 3b1b,B站也有熟肉。
向量
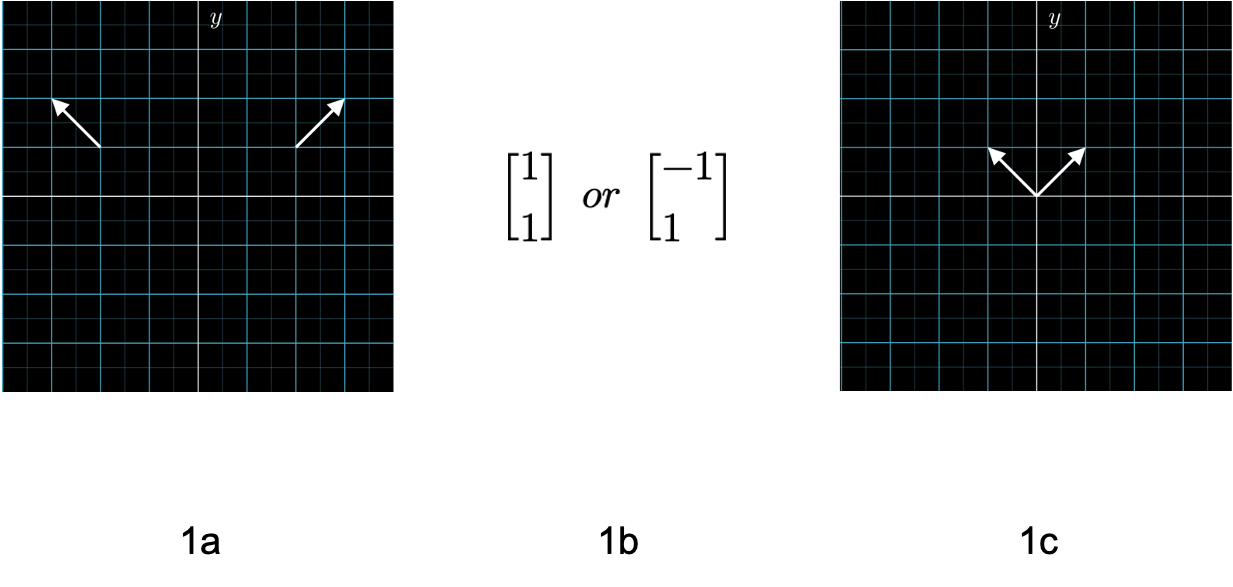
提到矩阵,首先要回顾的就是向量。只是向量在不止一门学科里被提及到:物理的向量指的是一个箭头,有长度,有方向,可以在摆放在空间的任意位置(1a);计算机里的向量更像是一个列表(1b)。而我们这里的向量是一个有方向,有大小,但是起源于原点的箭头(1c)。
关于向量的运算这里不再赘述。
矩阵与线性变换
矩阵是什么?怎么去理解矩阵乘以向量?怎么去理解矩阵乘以矩阵?
线性代数的核心应该就是线性变换吧,变换指的是坐标的变换,而坐标系就是可以用矩阵来表示的(用列向量来表示坐标系的单位向量)。线性,简单来说,就是任意一条直线,变换后依旧保持直线或变成一个点(降维)。另外还有一个重要的特征,原点不变。
比方说我们常见的XY坐标系就是:
假设坐标系中有两个向量(,
)和(
,
),如果我们现在希望变换到另一个坐标系,比方说UV:
这两个向量在UV坐标系中是(,
)和(
,
),但是基于我们原先的XY坐标系却是(
,
)和(
,
):
所以矩阵乘以向量,其实是将该矩阵所表示的坐标系中的向量翻译到XY坐标系中:
,
.
然而,刚刚那个UV坐标系可以通过两次变换得到(先,再
):
所以矩阵乘以矩阵其实就是对XY坐标系先变换一次得到了新的基向量,再对XY坐标系变换一次,观察新的基向量落于什么位置。但是变换的顺序是不可以更换的。假如我们刚刚是先应用,再应用
,结果会是(
):
矩阵相关概念
秩
矩阵的秩是什么?假设矩阵A为:
,
根据书本我们可以计算如下:
.
那么,4 又是什么呢?这让我想起了《琅琊榜》中霓凰与林殊相认的场景:所有人都在问苏哲是谁,当发现他是梅长苏后,只有霓凰会继续追查,梅长苏又是谁。
前面提到了,矩阵其实就是将XY坐标系换到另一个坐标系。所以A矩阵就是将原先的标准XY基向量变成
:
矩阵的秩动态示意图
从视频中可以看出,我们算出来的4其实是基向量所表示的四边形面积的变化。当然,这个面积的变化不是仅仅针对这个四边形,是所有的形状的面积都会相应的变化:
线性变换后的图形面积
如果我们再根据矩阵B变换一次:
矩阵相乘后得到的秩
我们可以看到,被A矩阵放大的四边形面积被B矩阵再次放大。我们也可以看出:
.
当然,秩可以是负数,意味着坐标系被翻转了;也可以是0,意味着新的基向量线性相关,在一条线上(从二维降到了一维)。
逆矩阵
刚刚的A矩阵将基向量从标准XY基向量变成
,那么什么样的变换可以在变换标准XY基向量的同时,将
再变回到之前的基向量。这里就引入了逆矩阵:
逆矩阵的动态演示
如果A的秩是0的话,无论你如何再次线性变换基向量,也没办法让新的基向量回到之前的基向量,也就是不存在逆矩阵。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!