STM32f103C8T6下的MDA转运串口数据
采用DMA转运穿空铺收到的数据的好处是:
由于串口每收到一字节数据就会产生一个读信号或读中断;若采用轮询检测方式,则大大增加微处理器的开销,使之一直处于轮询判断标志位状态,若不轮询检测则会丢失数据;若使用中断方式读取串口接收到的数据,相较于轮询读有了较好的改善,但当传输来的数据很多时,微处理器就会不停的触发中断,因此会降低微处理器处理其他事件的速度;当使用DMA转运串口数据时,每来一次触发信号,DMA会自动转运数据,这样只需要读取转运目的地寄存器的数据就可以得到传来的数据。
DMA转运数据又可分为有中断和无中断方式。采用有中断方式时,当DMA的传输计数器值减到零时会触发中断响应,但若一次数据转运结束后,传输传输计数器的值没有减到零则不会触发中断;若采用无中断的方式,在串口传输数据到来之后,需软件检测是否读到数据,当定义足够大的缓存空间,就可实现不定长的读取串口数据。
DMA转运数据三要素:
1、传输计数器值大于零
2、触发源产生触发信号
3、DMA使能
serial.c
#include "stm32f10x.h"
#include "String.h"
#include "OLED.h"//USART2与ESP8266通信 PA2---TX引脚 PA3----RX引脚
uint8_t ESP8266_To_Serial[100];//ESP8266发来的原始数据
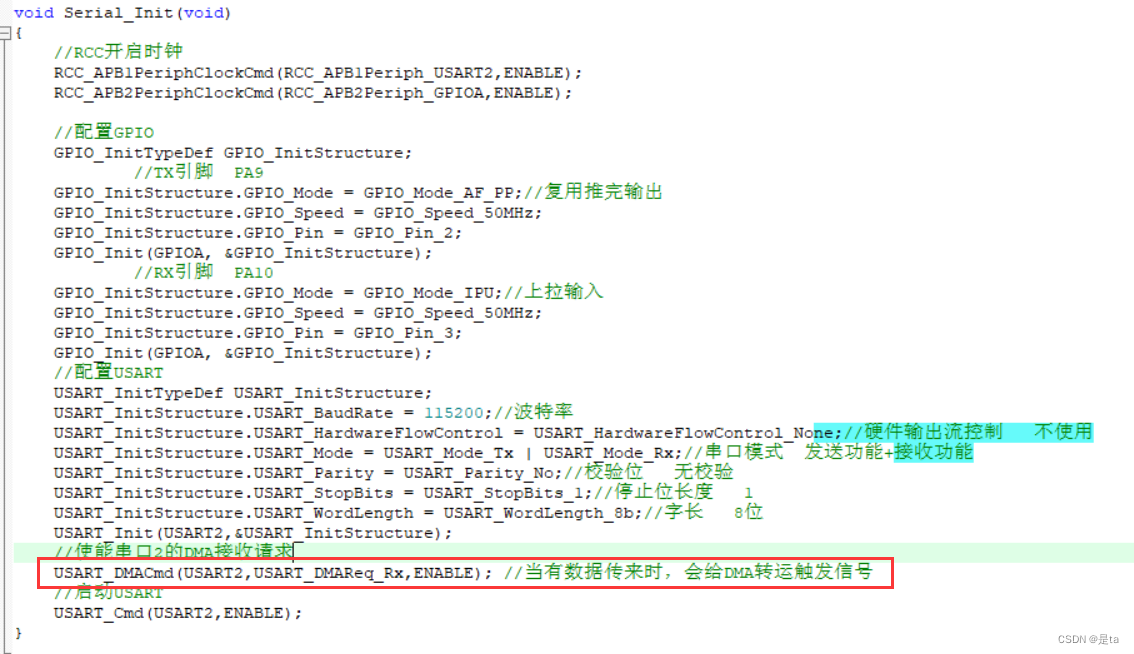
uint8_t command[10];//解析出来的命令数据void Serial_Init(void)
{//RCC开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//配置GPIOGPIO_InitTypeDef GPIO_InitStructure;//TX引脚 PA9GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推完输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2;GPIO_Init(GPIOA, &GPIO_InitStructure);//RX引脚 PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;GPIO_Init(GPIOA, &GPIO_InitStructure);//配置USARTUSART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate = 115200;//波特率USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件输出流控制 不使用USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//串口模式 发送功能+接收功能USART_InitStructure.USART_Parity = USART_Parity_No;//校验位 无校验USART_InitStructure.USART_StopBits = USART_StopBits_1;//停止位长度 1USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长 8位USART_Init(USART2,&USART_InitStructure);//使能串口2的DMA接收请求USART_DMACmd(USART2,USART_DMAReq_Rx,ENABLE); //当有数据传来时,会给DMA转运触发信号//启动USARTUSART_Cmd(USART2,ENABLE);
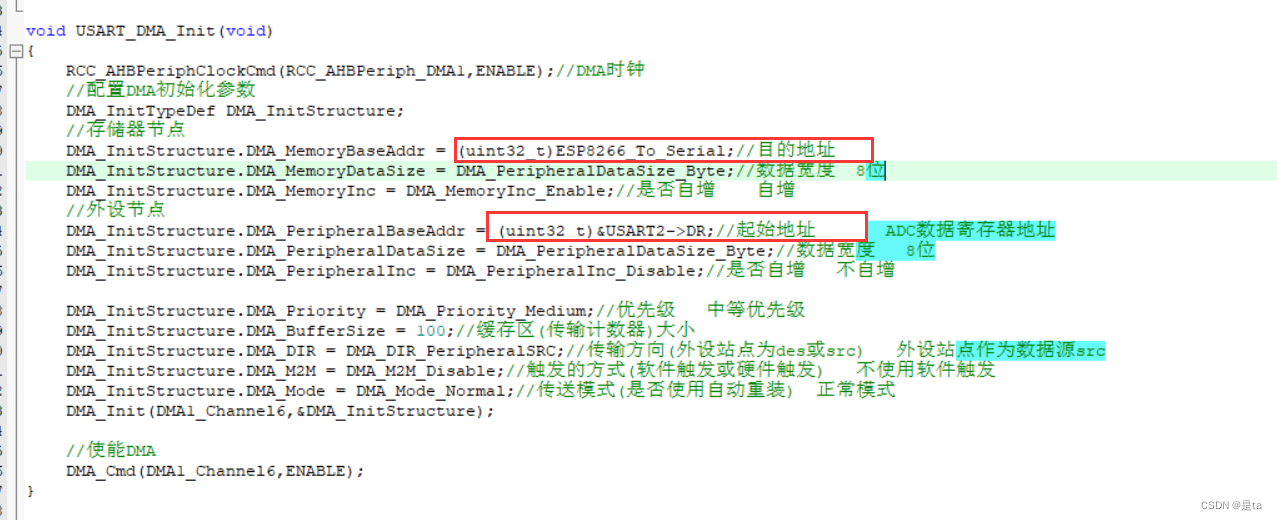
}void USART_DMA_Init(void)
{RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);//DMA时钟//配置DMA初始化参数DMA_InitTypeDef DMA_InitStructure;//存储器节点DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)ESP8266_To_Serial;//转运地址DMA_InitStructure.DMA_MemoryDataSize = DMA_PeripheralDataSize_Byte;//数据宽度 8位DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;//是否自增 自增//外设节点DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&USART2->DR;//起始地址 ADC数据寄存器地址DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;//数据宽度 8位DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//是否自增 不自增DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;//优先级 中等优先级DMA_InitStructure.DMA_BufferSize = 100;//缓存区(传输计数器)大小DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;//传输方向(外设站点为des或src) 外设站点作为数据源srcDMA_InitStructure.DMA_M2M = DMA_M2M_Disable;//触发的方式(软件触发或硬件触发) 不使用软件触发DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;//传送模式(是否使用自动重装) 正常模式DMA_Init(DMA1_Channel6,&DMA_InitStructure);//使能DMADMA_Cmd(DMA1_Channel6,ENABLE);
}//发送函数
//发送一个字节
void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART2,Byte);while(USART_GetFlagStatus(USART2,USART_FLAG_TXE) == RESET);
}//发送一个数组
void Serial_SendArray(uint8_t *Array,uint8_t Length)
{uint16_t i;for(i=0;i易错点:
1、触发源
2、转运起始地址和目的地址不能设置反,否则会出现程序卡死现象
3、DMA转运无中断的方式需要一个更新函数
在每次转运数据后,清除缓存空间数据,并且重新设置计数器值(计数器器值只有在DMA失能请情况下才能修改)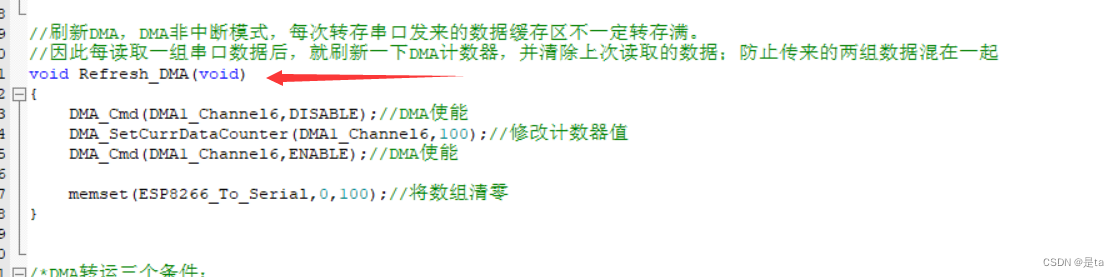
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!