RGB相机标定
RGB相机标定:
输入:需要10-20张棋盘格图片(分辨率越高越好,因为结果的单位是以pixel的尺寸计的)
输出:主要我们需要的信息内参矩阵,畸变参数
内参矩阵
- 表示焦距的参数:fx,fy
- 主点偏移x0,y0(坐标原点左上角)
畸变参数:
径向畸变(Radial distortion):
主要两类
- 桶形畸变,2 枕形畸变 ,都是由于镜头本身造成的
一般用k1,k2,k3表示, index越大表示阶数越高,也就越不重要
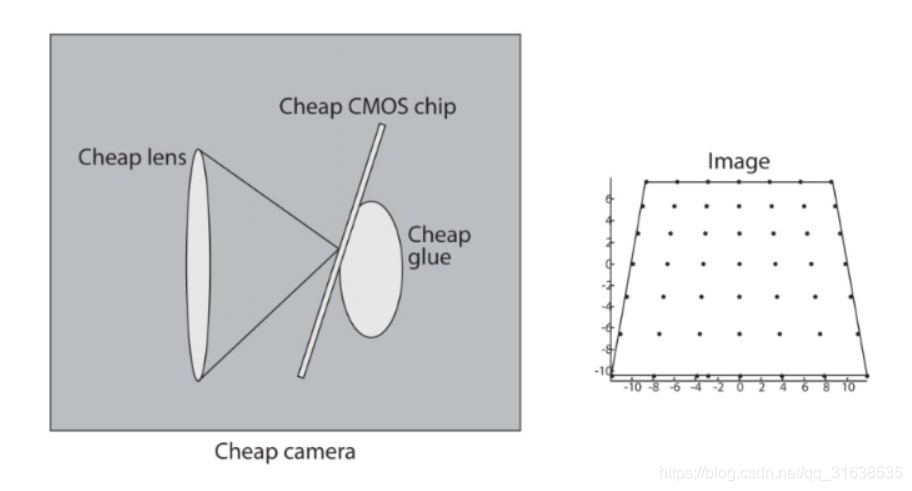
切向畸变(Tangential distortion): 是因为镜头中心的切面和sensor面不平行(安装)导致的
一般用p1,p2表示
一般标定出来畸变参数会有5个,放在一个向量里
分别是[k1,k2,p1,p2,k3]
相机的外参:
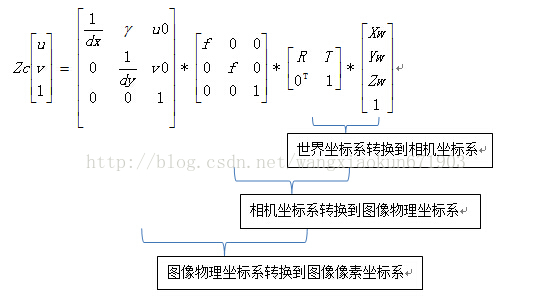
这里里面有一个关键的Zc,这个实际上是相机坐标系下空间点的深度值
还有一点要注意,实际上RT是指的世界坐标系(标定板的坐标系原点)到相机原点的转换
而且每一张图都会有一个外参矩阵,但是外参矩阵是怎么计算的这个需要好好研究一下,很有意思
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!