[pcl::PCDReader::read] Number of points read (3643177) is different than expected (7335701)
[pcl::PCDReader::read] Number of points read (3643177) is different than expected (7335701) couldn’t load the pcd file
引子
lego-loam和lio-sam在跑完建图之后,可以选择是否导出特征点地图和fullMap的pcd文件。lego-loam导出pcd文件的代码附在最后(有所改动,详情可参考源码),pcd文件最后存到/tmp目录下。该段代码是放在visualizeMapThread中的,前面有一个ros::ok的循环。当ctrl+c结束后,开始执行后面的导出pcd程序,但如果在一定时间内没有执行完,进程强制退出,窗口抛出"escalating to SIGTERM"错误。此时存储的pcd文件可能是不完全的,当使用pcl::io::loadPCDFile或者pcl::PCDReader::read读取的时候,可能会报"Number of points read (3643177) is different than expected (7335701)" 错误,这是由于pcl::PointCloud的field中记录的点数和实际点数不一致引起的,可以通过以下两种方式解决:
1、修改field —— 使用文本编辑软件打开pcd文件,直接修改field中的WIDTH和POINTS的数值。该方法具有一般性,当然还是应该查一下为什么点数会不一致。下图是使用vscode打开Xpcd文件效果截图。

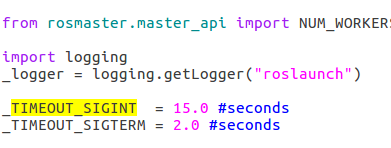
2、针对"escalating to SIGTERM"1引起的点云数目不一致问题,修改/opt/ros/
kinetic(ros版本)/lib/python2.7/dist-package/roslaunch/nodeprocess.py文件中的"_TIMEOUT_SIGINT = 15.0 #seconds"为自己期望的运行时间,从而保证实际点数和field中记录的值相同。当然,这只针对由"escalating to SIGTERM"引起的点数不一致问题,不具有一般性。
附
void visualizeGlobalMapThread() {ros::Rate rate(0.2);while (ros::ok()){rate.sleep();publishGlobalMap();}std::cout << "save point cloud" << std::endl;// save final point cloud// 如果publishGlobalMap()不起作用,下面的这一句会抛出异常// pcl::io::savePCDFileASCII(fileDirectory+"finalCloud.pcd", *globalMapKeyFramesDS);string cornerMapString = "/tmp/cornerMap.pcd";string surfaceMapString = "/tmp/surfaceMap.pcd";string trajectoryString = "/tmp/trajectory.pcd";pcl::PointCloud<PointType>::Ptr cornerMapCloud(new pcl::PointCloud<PointType>());pcl::PointCloud<PointType>::Ptr cornerMapCloudDS(new pcl::PointCloud<PointType>());pcl::PointCloud<PointType>::Ptr surfaceMapCloud(new pcl::PointCloud<PointType>());pcl::PointCloud<PointType>::Ptr surfaceMapCloudDS(new pcl::PointCloud<PointType>());// 添加了fullMappcl::PointCloud<PointType>::Ptr fullMapCloud(new pcl::PointCloud<PointType>());pcl::PointCloud<PointType>::Ptr fullMapCloudDS(new pcl::PointCloud<PointType>());for(int i = 0; i < cornerCloudKeyFrames.size(); i++) {*cornerMapCloud += *transformPointCloud(cornerCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);*surfaceMapCloud += *transformPointCloud(surfCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);*surfaceMapCloud += *transformPointCloud(outlierCloudKeyFrames[i], &cloudKeyPoses6D->points[i]);}*fullMapCloud += *cornerMapCloud;*fullMapCloud += *surfaceMapCloud;downSizeFilterCorner.setInputCloud(cornerMapCloud);downSizeFilterCorner.filter(*cornerMapCloudDS);downSizeFilterSurf.setInputCloud(surfaceMapCloud);downSizeFilterSurf.filter(*surfaceMapCloudDS);downSizeFilterCorner.setInputCloud(fullMapCloud);downSizeFilterCorner.filter(*fullMapCloudDS);std::cout << cornerMapCloud->points.size() << std::endl;std::cout << surfaceMapCloud->points.size() << std::endl;pcl::io::savePCDFileASCII(fileDirectory+"cornerMap.pcd", *cornerMapCloudDS);pcl::io::savePCDFileASCII(fileDirectory+"surfaceMap.pcd", *surfaceMapCloudDS);pcl::io::savePCDFileASCII(fileDirectory+"trajectory.pcd", *cloudKeyPoses3D);pcl::io::savePCDFileASCII(fileDirectory+"fullMap.pcd", *fullMapCloudDS);}
Reference
https://blog.csdn.net/zack_liu/article/details/78456467 ↩︎
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!