不定期备考小tips[常微][0] #20210524
不定期备考小tips[常微][0] #20210524
- 常微(Strogatz书)
- 一些描述稳定性的词汇
- 退化结点(degenerate node)
- 线性近似
- 换极坐标常见套路
- 关于对称性的若干思考
本专栏主要作个人笔记,有相关知识预备的同学也可作复习用。不保证无相应基础的人士能看明白。
万一考试考到了,或者对你的学习有较大帮助,一键三连不过分吧(斜眼笑)
常微(Strogatz书)
参考书籍:
一些描述稳定性的词汇
假设 x ⃗ 0 = 0 ⃗ \vec x_0 = \vec 0 x0=0是待考察的点。
- 吸引的(attracting)
t → ∞ t\to\infty t→∞时,一切 0 ⃗ \vec 0 0附近的点都演化到 0 ⃗ \vec 0 0处。(特别地,如果不仅仅是“附近”,而是所有点,就称为全局吸引的(globally attracting)。 - 李雅普诺夫稳定(Liapunov stable)
任意 0 ⃗ \vec 0 0附近小球 B ϵ ( 0 ) B_\epsilon(0) Bϵ(0),都可以找到相应的 0 ⃗ \vec 0 0附近小球 B δ ( 0 ) B_\delta(0) Bδ(0)( δ \delta δ当然和 ϵ \epsilon ϵ有关),使得 B δ ( 0 ) B_\delta(0) Bδ(0)当中起始的轨迹在演化中都不超出小球 B ϵ ( 0 ) B_\epsilon(0) Bϵ(0) - 两者的区别和联系
李雅普诺夫稳定但不吸引称为中性稳定。(neutrally stable),两者都满足称为渐近稳定/稳定(asymptotically stable/stable),两者都不满足称为不稳定(unstable)。 - 两者互不蕴含。反例:
- 圆环上(即 x = 0 x=0 x=0和 x = 2 π x=2\pi x=2π看作相同的点), x ˙ = 1 − c o s x \dot x = 1-cosx x˙=1−cosx决定的系统。原点处吸引但不李雅普诺夫稳定。
思考:如果需要构造二维平面上类似于上述性质的系统,怎么办?一种可能的做法是直接令二维平面上一个环形处的向量场 x ⃗ \vec x x大小由上面决定,而方向由圆环的切向决定。其它地方就连续作延拓。 - 每一点都有 x ⃗ ˙ = 0 \dot{ \vec x} = 0 x˙=0决定的系统。任意点处李雅普诺夫稳定但不吸引。
- 二维平面上所有点都趋向于 x x x轴的系统。(一 向 箔)
退化结点(degenerate node)
二维系统,平衡点附近矩阵的Jordan标准形如 ( λ 1 0 λ ) , λ ≠ 0 \left(\begin{matrix}\lambda & 1 \\ 0 & \lambda\end{matrix}\right),\lambda \neq 0 (λ01λ),λ=0,则是退化结点。(如果 λ = 0 \lambda=0 λ=0则是非孤立结点!)
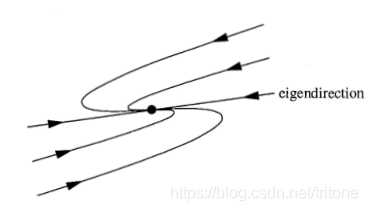
- 理解方式1: ( 1 , 0 ) T (1, 0)^T (1,0)T是原矩阵特征向量,则看到直线(图中eigendirection),而一般的 ( c o s θ , s i n θ ) T (cos\theta,sin\theta)^T (cosθ,sinθ)T不是,且
( λ 1 0 λ ) ( c o s θ s i n θ ) = ( λ c o s θ + s i n θ λ s i n θ ) \left(\begin{matrix}\lambda & 1 \\ 0 & \lambda\end{matrix}\right) \left(\begin{matrix}cos\theta \\ sin\theta \end{matrix}\right)= \left(\begin{matrix}\lambda cos\theta + sin\theta \\ \lambda sin\theta \end{matrix}\right) (λ01λ)(cosθsinθ)=(λcosθ+sinθλsinθ)
可以看到 θ \theta θ从 0 0 0变化到 π / 2 \pi/2 π/2时, ( λ c o s θ + s i n θ λ s i n θ ) \left(\begin{matrix}\lambda cos\theta + sin\theta \\ \lambda sin\theta \end{matrix}\right) (λcosθ+sinθλsinθ)的变化情况解释了图。(关键点是每个点唯一决定了一个方向。如果决定的方向恰好指向平衡点就是星(star)。而此处决定的方向不恰好指向平衡点) - 理解方式2: ( λ 1 0 λ ) \left(\begin{matrix}\lambda & 1 \\ 0 & \lambda\end{matrix}\right) (λ01λ)中左上角的 λ \lambda λ做微扰,退化结点将被扰动成具有两个非常相近的特征方向的结点,且两个特征方向衰减一快一慢。
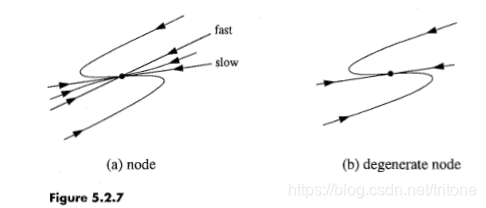
- 理解方式3:介于螺旋(spiral)与结点(node)之间。(方程的两根从两个相近的实根过渡到两个相近的共轭复根)
个人认为前两种理解方式更合理,因为是否是退化结点不光是方程两根决定的,而是和对角化有关。这里的“方程的根过渡”难以解释什么时候是星(star),什么时候是退化结点。
线性近似
- 对于一般的平衡点 ( x ⋆ , y ⋆ ) (x^\star, y^\star) (x⋆,y⋆),我们换元 u = x − x ⋆ , v = y − y ⋆ u=x-x^\star,v=y-y^\star u=x−x⋆,v=y−y⋆,则 u , v u,v u,v在原点附近的行为就可近似用一阶线性常系数微分方程组
( u ˙ v ˙ ) = A ( u v ) \left(\begin{matrix}\dot u \\ \dot v\end{matrix}\right)=A \left(\begin{matrix}u \\ v \end{matrix}\right) (u˙v˙)=A(uv)
刻画。我们舍去了二阶以上的项。 - 如此近似考察下如果该平衡点不是边界情况(也就是该点是鞍点、结点或螺旋),则可以确定未近似也如此。特别注意星是边界情况。
其它边界情况:退化结点,中心,非孤立的平衡点。
星和退化结点在扰动下稳定性不变,只是“性质”可能改变。
这其实从高层次来讲就是个分类标准问题。比如你可以把所有稳定平衡点都分为一类,那么星和退化结点就不是边界情况。或者你可以把附近存在与 y = x 520 y=x^{520} y=x520图像某局部全等的轨迹的结点称为“虐狗结点”,那么“虐狗结点”显然在高阶扰动下可能改变其“性质”。什么叫做一类,什么叫做“性质”,什么叫做“边界”凭你喜欢。
实际上,书154页有个采用另一种标准的分类:即
- 鲁棒(Robust)情况:源(source),汇(sink),鞍点(saddle)。
- 边界(Marginal)情况:中心(center),非孤立(non-isolated)。
此处“鲁棒”表示“参数”扰动下,平衡点类型的某种“稳定性”。而“稳定”本身表示待考察变量 x ⃗ \vec x x被扰动后在之后演化中的稳定性。老套娃了!
- 做例题 x ˙ = − x + x 3 , y ˙ = − 2 y \dot x=-x+x^3, \dot y=-2y x˙=−x+x3,y˙=−2y:先画出平衡点,再画出水平竖直线(特征方向),再画其它线。
- 做例题 x ˙ = − y + a x ( x 2 + y 2 ) , y ˙ = x + a y ( x 2 + y 2 ) \dot x=-y+ax(x^2+y^2), \dot y=x+ay(x^2+y^2) x˙=−y+ax(x2+y2),y˙=x+ay(x2+y2)
直接舍去非线性项,发现是边界情况(中心)。
近似后是中心,实际可能不是中心,而是稳定螺旋或不稳定螺旋。(可类比一维 x ˙ = x 3 \dot x = x^3 x˙=x3)
看到 x 2 + y 2 x^2+y^2 x2+y2,尝试换极坐标,发现就很容易考察。
换极坐标常见套路
这个是个比较普遍的技巧,值得开个小标题。
- 从 x 2 + y 2 = r 2 x^2+y^2=r^2 x2+y2=r2得到 x x ˙ + y y ˙ = r r ˙ x\dot x+y\dot y=r\dot r xx˙+yy˙=rr˙
- 从 r c o s θ = x , r s i n θ = y rcos\theta = x, rsin\theta = y rcosθ=x,rsinθ=y得到
r c o s θ θ ˙ = y ˙ − r ˙ s i n θ , r s i n θ θ ˙ = − x ˙ + r ˙ c o s θ rcos\theta \dot\theta=\dot y -\dot rsin\theta, rsin\theta \dot \theta =- \dot x +\dot rcos\theta rcosθθ˙=y˙−r˙sinθ,rsinθθ˙=−x˙+r˙cosθ
x 2 θ ˙ = x y ˙ − x r ˙ s i n θ , y 2 θ ˙ = − y x ˙ + y r ˙ c o s θ x^2\dot \theta=x\dot y-x\dot r sin\theta, y^2\dot\theta=-y\dot x+y\dot rcos\theta x2θ˙=xy˙−xr˙sinθ,y2θ˙=−yx˙+yr˙cosθ
在一切 x 2 + y 2 ≠ 0 x^2+y^2\neq 0 x2+y2=0也就是 r ≠ 0 r\neq 0 r=0的点,两式相加得到
θ ˙ = x y ˙ − y x ˙ r 2 \dot \theta = \frac{x\dot y -y \dot x}{r^2} θ˙=r2xy˙−yx˙
(直接假定 a r c t a n y x arctan\frac yx arctanxy存在当然是不严谨的,但可以帮助记忆)
关于对称性的若干思考
x ˙ = y , y ˙ = − x \dot x= y,\dot y = - x x˙=y,y˙=−x,直接通过对称性证明有闭轨。
- 关于对称性的简单理解:进行某些变换之后,系统不变(在此处可理解为只有变量名不同)。
- 轴对称:关于某直线反射下不变。
具体地:平面图形看成一些 ( x , y ) (x,y) (x,y)构成的点集,那么关于 y y y轴轴对称,也就是点集 { ( x , y ) ∣ ( x , y ) ∈ A } = { ( x ′ , y ) ∣ ( x ′ , y ) ∈ A } \{(x,y)|(x,y)\in A\}=\{(x',y)|(x',y)\in A\} {(x,y)∣(x,y)∈A}={(x′,y)∣(x′,y)∈A},其中 x ′ = − x x'=-x x′=−x。换元了之后,只有变量名不同,表示的仍是一个点集。 - 中心对称:绕某点旋转一定角度不变。
- 时间平移对称性:所有时间 t t t换成 t + t 0 t+t_0 t+t0,不变
- 空间平移对称性:所有空间 x x x换成 x + x 0 x+x_0 x+x0,不变
- 时间反演对称性:所有时间 t t t换成 − t -t −t,不变
- 本系统具有的对称性
- 显然关于原点旋转任意角度,系统不变。但实际上满足此性质的系统还有决定各种螺旋线的系统。所以仅用该对称性不够。
- 整个系统放大, x ′ = a x , y ′ = a y x'=ax,y'=ay x′=ax,y′=ay,系统不变(即 x ˙ ′ = y ′ , y ˙ ′ = − x ′ \dot x' = y', \dot y' = -x' x˙′=y′,y˙′=−x′,系统只有变量名不同)。
但实际上满足此性质的系统还有决定对数螺线的系统等。 - 时间反演同时关于一条直线对称, t ′ = − t , x ′ = − x , y ′ = y t'=-t, x'=-x, y'=y t′=−t,x′=−x,y′=y,系统不变(即 d x ′ d t ′ = y ′ , d y ′ d t ′ = − x ′ \frac{dx'}{dt'}=y',\frac{dy'}{dt'}=-x' dt′dx′=y′,dt′dy′=−x′,系统只有变量名不同)。
该对称性可以证明系统具有闭轨。因为 ( 0 , 1 ) (0,1) (0,1)(时间上正向)运动到 y y y负半轴和时间反演到 y y y轴负半轴到达的点相同。
然而此时并没有证明到达的点纵坐标 − 1 -1 −1。实际上,此时再加上旋转对称性就可以说明这一点。
设 ( 0 , 1 ) (0,1) (0,1)运动到 x x x轴为 A A A点,时间反演到 x x x轴为 B B B点,则 A A A与 B B B关于原点对称。则 A A A和 B B B各自再运动到 y y y轴处,两点仍对称。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!