【数学】关于四元数的顺序无关的旋转混合的代码实现
四元数基础 + 个人理解
四元数的表达方式 Q=[x y z w],其中x y z为矢量,是四元数的虚部,w为标量,是四算数的实部。
另外,在计算公式中,四元数的表达方式为w + v,其中w为标量,是四元数的实部,v为三维矢量。
定义: q = a + u = a + b i + c j + d k q=a+u= a+bi+cj+dk q=a+u=a+bi+cj+dk p = t + v = t + x i + y j + z k p=t+v=t+xi+yj+zk p=t+v=t+xi+yj+zk
注:u和v为矢量
- 加法:p + q
p + q = a + t + u + v = ( a + t ) + ( b + x ) i + ( c + y ) j + ( d + z ) k p+q=a+t+u+v=(a+t)+(b+x)i+(c+y)j+(d+z)k p+q=a+t+u+v=(a+t)+(b+x)i+(c+y)j+(d+z)k - 乘法:qp
q p = a t − u ・ v + a v + t u + u × v qp=at-u・v+av+tu+u×v qp=at−u・v+av+tu+u×v
q p = ( a t − b x − c y − d z ) + ( b t + a x + d y − c z ) i + ( c t + a y + b z − d x ) j + ( d t + z a + c x − b y ) k qp=(at-bx-cy-dz)+(bt+ax+dy-cz)i+(ct+ay+bz-dx)j+(dt+za+cx-by)k qp=(at−bx−cy−dz)+(bt+ax+dy−cz)i+(ct+ay+bz−dx)j+(dt+za+cx−by)k - 点积:p・q
p ・ q = a t + u ・ v = a t + b x + c y + d z p・q=at+u・v=at+bx+cy+dz p・q=at+u・v=at+bx+cy+dz - 共轭
q ∗ = a + ( − u ) = a − b i − c j − d k q*=a+(-u)= a-bi-cj-dk q∗=a+(−u)=a−bi−cj−dk - 外积:Outer(p,q)
O u t e r ( p , q ) = ( p ∗ q − q ∗ p ) / 2 Outer(p,q)=(p*q-q*p)/2 Outer(p,q)=(p∗q−q∗p)/2
O u t e r ( p , q ) = a t − u ・ v + a v + t u Outer(p,q)=at-u・v+av+tu Outer(p,q)=at−u・v+av+tu
O u t e r ( p , q ) = ( t b − a x + c z − d y ) i + ( t c − a y + d x − b z ) j + ( t d − a z + b y − x c ) k Outer(p,q)=(tb-ax+cz-dy)i+(tc-ay+dx-bz)j+(td-az+by-xc)k Outer(p,q)=(tb−ax+cz−dy)i+(tc−ay+dx−bz)j+(td−az+by−xc)k - 偶积:Even(p,q)
E v e n ( p , q ) = ( q p + p q ) / 2 Even(p,q)=(qp+pq)/2 Even(p,q)=(qp+pq)/2
E v e n ( p , q ) = a t − u ・ v + a v + t u Even(p,q)=at-u・v+av+tu Even(p,q)=at−u・v+av+tu
E v e n ( p , q ) = ( a t − b x − c y − d z ) + ( a x + t b ) i + ( a y + t c ) j + ( a z + t d ) k Even(p,q)=(at-bx-cy-dz)+(ax+tb)i+(ay+tc)j+(az+td)k Even(p,q)=(at−bx−cy−dz)+(ax+tb)i+(ay+tc)j+(az+td)k - 叉积:p×q
p × q = ( p q − q p ) / 2 p×q=(pq-qp)/2 p×q=(pq−qp)/2
p × q = u × v p×q=u×v p×q=u×v
p × q = ( c z − d y ) i + ( d x − b z ) j + ( b y − x c ) k p×q=(cz-dy)i+(dx-bz)j+(by-xc)k p×q=(cz−dy)i+(dx−bz)j+(by−xc)k - 逆: p − 1 p^{-1} p−1
p − 1 = p ∗ / ( p ・ p ) p^{-1}=p*/(p・p) p−1=p∗/(p・p) - 标量部:Scalar§
1 ・ p = ( p + p ∗ ) / 2 = t 1・p=(p+p*)/2=t 1・p=(p+p∗)/2=t - 矢量部分:Vector§
O u t e r ( 1 , p ) = ( p − p ∗ ) / 2 = u = b i + c j + d k Outer(1,p)=(p-p*)/2=u=bi+cj+dk Outer(1,p)=(p−p∗)/2=u=bi+cj+dk - 模:|p|
∣ p ∣ = p ・ p = p ∗ p = a 2 + b 2 + c 2 + d 2 |p|=\sqrt{p・p}=\sqrt{p*p}=\sqrt{a^{2}+b^{2}+c^{2}+d^{2}} ∣p∣=p・p=p∗p=a2+b2+c2+d2 - 符号数:sgn§
s g n ( p ) = p / ∣ p ∣ sgn(p)=p/|p| sgn(p)=p/∣p∣ - 辐角:arg§
a r g ( p ) = a r c c o s ( S c a l a r ( p ) / ∣ p ∣ ) arg(p)=arccos(Scalar(p)/|p|) arg(p)=arccos(Scalar(p)/∣p∣) - 幂和对数
因为四元数有除法,所以幂和对数都可以定义 - 自然幂:
e x p ( p ) = e x p ( a ) ( c o s ( ∣ u ∣ ) + s g n ( u ) s i n ( u ) ) exp(p)=exp(a)(cos(|u|)+sgn(u)sin(u)) exp(p)=exp(a)(cos(∣u∣)+sgn(u)sin(u)) - 自然对数: l n ( p ) = l n ( ∣ p ∣ ) + s g n ( u ) a r g ( p ) ln(p)=ln(|p|)+sgn(u)arg(p) ln(p)=ln(∣p∣)+sgn(u)arg(p)
- 幂: p q = e q ∗ l n ( p ) p^{q}=e^{q*ln(p)} pq=eq∗ln(p)
- 三角函数:
- 正弦: s i n ( p ) = s i n ( a ) c o s h ( ∣ u ∣ ) + c o s ( a ) s g n ( u ) s i n h ( ∣ u ∣ ) sin(p)=sin(a)cosh(|u|)+cos(a)sgn(u)sinh(|u|) sin(p)=sin(a)cosh(∣u∣)+cos(a)sgn(u)sinh(∣u∣)
- 余弦: c o s ( p ) = c o s ( a ) c o s h ( ∣ u ∣ ) − s i n ( a ) s g n ( u ) s i n h ( ∣ u ∣ ) cos(p)=cos(a)cosh(|u|)-sin(a)sgn(u)sinh(|u|) cos(p)=cos(a)cosh(∣u∣)−sin(a)sgn(u)sinh(∣u∣)
- 正切: t a n ( p ) = s i n ( p ) / c o s ( p ) tan(p)=sin(p)/cos(p) tan(p)=sin(p)/cos(p)
- 双曲函数:
- 双曲正弦: s i n h ( p ) = s i n h ( a ) c o s ( ∣ u ∣ ) + c o s h ( a ) s g n ( ∣ u ∣ ) s i n ( ∣ u ∣ ) sinh(p)=sinh(a)cos(|u|)+cosh(a)sgn(|u|)sin(|u|) sinh(p)=sinh(a)cos(∣u∣)+cosh(a)sgn(∣u∣)sin(∣u∣)
- 双曲余弦: c o s h ( p ) = c o s h ( a ) c o s ( ∣ u ∣ ) + s i n h ( a ) s g n ( ∣ u ∣ ) s i n ( ∣ u ∣ ) cosh(p)=cosh(a)cos(|u|)+sinh(a)sgn(|u|)sin(|u|) cosh(p)=cosh(a)cos(∣u∣)+sinh(a)sgn(∣u∣)sin(∣u∣)
- 双曲正切: t a n h ( p ) = s i n h ( p ) / c o s h ( p ) tanh(p)=sinh(p)/cosh(p) tanh(p)=sinh(p)/cosh(p)
- 反双曲函数:
- 反双曲正弦: a r c s i n h ( p ) = l n ( p + p 2 + 1 ) arcsinh(p)=ln(p+\sqrt{p^2+1}) arcsinh(p)=ln(p+p2+1)
- 反双曲余弦: a r c c o s h ( p ) = l n ( p + p 2 − 1 ) arccosh(p)=ln(p+\sqrt{p^2-1}) arccosh(p)=ln(p+p2−1)
- 反双曲正切: a r c t a n h ( p ) = ( l n ( 1 + q ) − l n ( 1 − q ) ) / 2 arctanh(p)=(ln(1+q)-ln(1-q))/2 arctanh(p)=(ln(1+q)−ln(1−q))/2
- 反三角函数:
- 反正弦函数: a r c s i n ( p ) = − s g n ( u ) a r c s i n h ( p ∗ s g n ( u ) ) arcsin(p)=-sgn(u)arcsinh(p*sgn(u)) arcsin(p)=−sgn(u)arcsinh(p∗sgn(u))
- 反余弦函数: a r c c o s ( p ) = − s g n ( u ) a r c c o s h ( p ) arccos(p)=-sgn(u)arccosh(p) arccos(p)=−sgn(u)arccosh(p)
- 反正切函数: a r c t a n ( p ) = − s g n ( u ) a r c t a n h ( p ∗ s g n ( u ) ) arctan(p)=-sgn(u)arctanh(p*sgn(u)) arctan(p)=−sgn(u)arctanh(p∗sgn(u))
-
问题
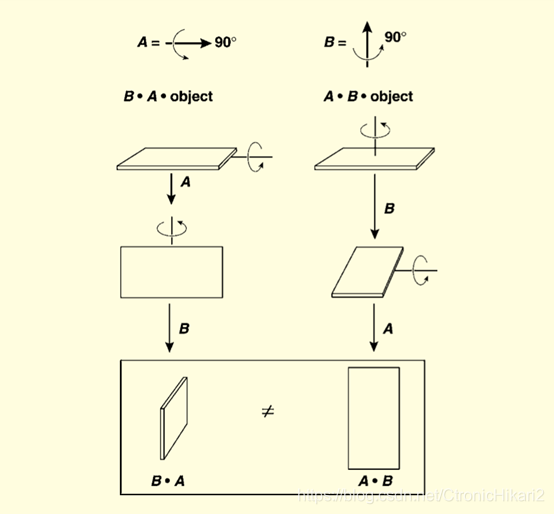
我所在的项目之中,需要通过各种各样的传感器来获取相应的【资源】,比如使用相机获取到的照片,使用LiDAR获取到的点阵。在此,不仅需要获取【资源】本身,还需要获取到有关该【资源】的【元数据】。比如【资源】的获取时间,获取时传感器所在的位置,以及传感器获取【资源】时的姿势数据等等。我们基于团队所开发的框架之下,定义了一个统一的坐标系。但是并不排除作为一名使用框架的开发者,会希望在自己定义的坐标系下进行数据获取与计算等。所以就涉及到了坐标系与坐标系之间的转换,其中缩放与位移在坐标系之间呈线性关系,是需要简单的相加或相乘。但是一旦涉及到旋转,问题就变得复杂的多。因为旋转操作所构成的空间是非线性的,无法对旋转操作进行直接的线性叠加。表示旋转的四元数也不能进行直接简单的线性叠加,而且旋转的操作具有不可交换性,顺序不同也会使得结果不同。
对于在某一个坐标系的基础上,通过旋转来定义另一个坐标系,则需要定义这个旋转。而方法无非有三种,欧拉角,旋转矩阵和四元数。很明显,欧拉角是最直观的一个,但反而是最复杂的一个。定义一个三维的旋转,不仅需要定义三个轴的旋转顺序与旋转大小,而且还要小心避免出现万向节死锁的情况,可以作为API输入参数设计,以降低应用程序开发者的使用门槛,但是在内部计算时就显得不是很合适。其次是旋转矩阵,旋转矩阵因为元素太多不适合作为参数输入,并且再计算式要尤为注意矩阵的左乘右乘与相乘的顺序。所以,四元数相较于欧拉角和矩阵就成了一个折中的方案,首先需要元素少,只有四个元素,易作为参数的输入。另外四元数在数学上定义了计算方法,可以进行比较复杂的处理。缺点则是四元数相对抽象,使用门槛也高,而且计算较为复杂。 -
理论
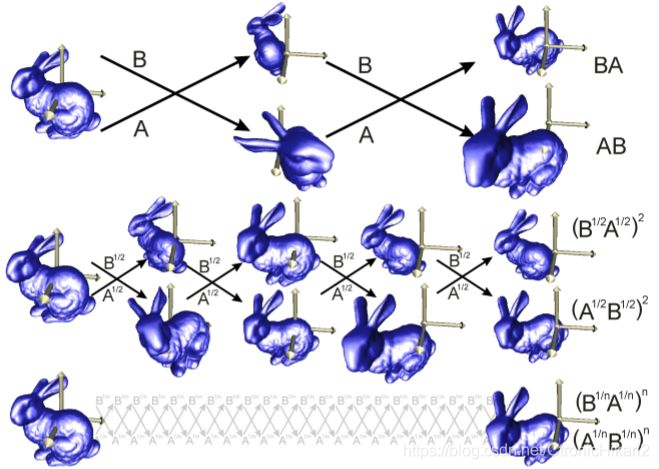
假设有两个旋转q1与q2,我们把q1与q2分成两份,并且依次乘每个四元数的一半。则有,
q1在前: q 1 1 / 2 ∗ q 2 1 / 2 ∗ q 1 1 / 2 ∗ q 2 1 / 2 q1^{1/2} * q2^{1/2} * q1^{1/2} * q2^{1/2} q11/2∗q21/2∗q11/2∗q21/2
q2在前: q 2 1 / 2 ∗ q 1 1 / 2 ∗ q 1 1 / 2 ∗ q 1 1 / 2 q2^{1/2} * q1^{1/2} * q1^{1/2} * q1^{1/2} q21/2∗q11/2∗q11/2∗q11/2
这使得在中间会出现一些相同的部分。假如,利用极限的思想,把q1和q2切成n份,每次只乘q1和q2的1/n一共乘n次,
可得: ( q 1 1 / n ∗ q 2 1 / n ) n (q1^{1/n}*q2^{1/n})^{n} (q11/n∗q21/n)n
这样,当n趋近无穷大时,中间相同的部分会越来越多,而两端剩下的不同的部分对结果的影响会越来越小。当结果为无穷时获得到趋于稳定的结果: lim n → ∞ ( q 1 1 / n ∗ q 2 1 / n ) n \lim\limits_{n\to\infty}(q1^{1/n}*q2^{1/n})^{n} n→∞lim(q11/n∗q21/n)n = lim n → ∞ ( q 2 1 / n ∗ q 1 1 / n ) n \lim\limits_{n\to\infty}(q2^{1/n}*q1^{1/n})^{n} n→∞lim(q21/n∗q11/n)n
美中不足的是极限在代码中没法使用。但是可以使用Lie product formula公式将极限问题转换为e的幂。
e A + B = lim n → ∞ ( e A / n ∗ e B / n ) n e^{A+B} = \lim\limits_{n\to\infty}(e^{A/n}*e^{B/n})^{n} eA+B=n→∞lim(eA/n∗eB/n)n
此时,令 A = l n q 1 A=lnq1 A=lnq1, B = l n q 2 B=lnq2 B=lnq2,则有 e l n q 1 + l n q 2 = lim n → ∞ ( e l n q 1 / n ∗ e l n q 2 / n ) n e^{lnq1+lnq2}=\lim\limits_{n\to\infty}(e^{lnq1/n}*e^{lnq2/n})^{n} elnq1+lnq2=n→∞lim(elnq1/n∗elnq2/n)n
可以看到,极限的运算等价于,先把四元数取对数,然后相加,最后把相加的结果进行指数运算。就得到了一个计算量是常数的计算极限的方法。
并且,由于加法是可交换的,理论上可以在上述的极限式子中直接在塞进去更多的四元数,外可附带上权重,得到一个与顺序无关的最终旋转混合方案: q f = e ∑ i l n q i w i = e ∑ i W i ∗ l n q i q_f=e^{\sum_ilnq_i^{w_i}}=e^{\sum_iW_i*lnq_i} qf=e∑ilnqiwi=e∑iWi∗lnqi
既Quaternion Blend(ArrayView quaternions, ArrayView weights); -
c++代码实现
- 这里利用Eigen库实现了两个四元数的顺序无关混合。可参考该代码进行自行开发多四元数混合方案。
- 计算两个四元数的混合,既计算公式 e l n q 1 + l n q 2 e^{lnq_1+lnq_2} elnq1+lnq2
- 已知,p,q为四元数,则ln§,ln(q)为四元数,ln§+ln(q)为四元数,exp§也为四元数
- 必要公式1: l n ( p ) = l n ( ∣ p ∣ ) + s g n ( u ) a r g ( p ) ln(p) = ln(|p|)+sgn(u)arg(p) ln(p)=ln(∣p∣)+sgn(u)arg(p) = l n ( ∣ p ∣ ) + u / ∣ u ∣ ∗ a r c c o s ( S c a l a r ( p ) / ∣ p ∣ ) =ln(|p|)+u/|u|*arccos(Scalar(p)/|p|) =ln(∣p∣)+u/∣u∣∗arccos(Scalar(p)/∣p∣) = l n ( ∣ p ∣ ) + u / ∣ u ∣ ∗ a r c c o s ( w / ∣ p ∣ ) =ln(|p|)+u/|u|*arccos(w/|p|) =ln(∣p∣)+u/∣u∣∗arccos(w/∣p∣)
- 必要公式2: l n ( p 1 ) + l n ( p 2 ) = l n ( ∣ p 1 ∣ ) + l n ( ∣ p 2 ∣ ) + u 1 / ∣ u 1 ∣ ∗ a r c c o s ( w 1 / ∣ p 1 ∣ ) + u 2 / ∣ u 2 ∣ + a r c c o s ( w 2 / ∣ p 2 ∣ ) ln(p_1)+ln(p_2)=ln(|p_1|)+ln(|p_2|)+u_1/|u_1|*arccos(w_1/|p_1|)+u_2/|u_2|+arccos(w_2/|p_2|) ln(p1)+ln(p2)=ln(∣p1∣)+ln(∣p2∣)+u1/∣u1∣∗arccos(w1/∣p1∣)+u2/∣u2∣+arccos(w2/∣p2∣)
- 必要公式3: e x p ( p ) = e x p ( w ) ( c o s ( ∣ u ∣ ) + s g n ( u ) s i n ( ∣ u ∣ ) ) exp(p)=exp(w)(cos(|u|)+sgn(u)sin(|u|)) exp(p)=exp(w)(cos(∣u∣)+sgn(u)sin(∣u∣)) = e x p ( w ) ∗ ( c o s ( ∣ u ∣ ) + u / ∣ u ∣ + s i n ( ∣ u ∣ ) ) =exp(w)*(cos(|u|)+u/|u|+sin(|u|)) =exp(w)∗(cos(∣u∣)+u/∣u∣+sin(∣u∣)) = e x p ( w ) + c o s ( ∣ u ∣ ) + e x p ( w ) ∗ u / ∣ u ∣ ∗ s i n ( ∣ u ∣ ) =exp(w)+cos(|u|)+exp(w)*u/|u|*sin(|u|) =exp(w)+cos(∣u∣)+exp(w)∗u/∣u∣∗sin(∣u∣)
Eigen::Quaterniond Blend2Rotations(Eigen::Quaterniond quaternion1, Eigen::Quaterniond quaternion2);//混合函数Eigen::Quaterniond lnQuaternion(Eigen::Quaterniond quaternion);//求四元数的自然对数Eigen::Quaterniond addQuaternion(Eigen::Quaterniond quaternion1, Eigen::Quaterniond quaternion2);//两四元数加和Eigen::Quaterniond expQuaternion(Eigen::Quaterniond quaternion);//求四元数的自然幂
Eigen::Quaterniond EncodeTool::Blend2Rotations(Eigen::Quaterniond quaternion1, Eigen::Quaterniond quaternion2)
{Eigen::Quaterniond logQ1 = lnQuaternion(quaternion1);Eigen::Quaterniond logQ2 = lnQuaternion(quaternion2);Eigen::Quaterniond add = addQuaternion(logQ1,logQ2);Eigen::Quaterniond blend = expQuaternion(add);return blend;
}Eigen::Quaterniond EncodeTool::lnQuaternion(Eigen::Quaterniond quaternion)
{//ln(p) = ln(|p|) + Sgn(u)*arg(p) u:vectordouble modulusOfP = sqrt(quaternion.x()*quaternion.x() + quaternion.y()*quaternion.y() + quaternion.z()*quaternion.z() + quaternion.w()*quaternion.w());double w = log(modulusOfP); //ln(|p|)double modulusOfU = sqrt(quaternion.x()*quaternion.x() + quaternion.y()*quaternion.y() + quaternion.z()*quaternion.z());double SgnUx = quaternion.x()/modulusOfU; //Sgn(u)double SgnUy = quaternion.y()/modulusOfU;double SgnUz = quaternion.z()/modulusOfU;double argP = acos(quaternion.w()/modulusOfP); //arg(p)Eigen::Quaterniond lnQ(argP*SgnUx, argP*SgnUy, argP*SgnUz, w);return lnQ;
}Eigen::Quaterniond EncodeTool::addQuaternion(Eigen::Quaterniond quaternion1, Eigen::Quaterniond quaternion2)
{double x = quaternion1.x() + quaternion2.x();double y = quaternion1.y() + quaternion2.y();double z = quaternion1.z() + quaternion2.z();double w = quaternion1.w() + quaternion2.w();Eigen::Quaterniond addQ(x,y,z,w);return addQ;
}Eigen::Quaterniond EncodeTool::expQuaternion(Eigen::Quaterniond quaternion)
{//exp(p) = exp(w) + (cos(|u|)+Sgn(u)sin(|u|))double expW = exp(quaternion.w());double modulusU = sqrt(quaternion.x()*quaternion.x() + quaternion.y()*quaternion.y() + quaternion.z()*quaternion.z());double cosU = cos(modulusU);double sinU = sin(modulusU);double w = expW * cosU;double x = quaternion.x()/modulusU*expW*sinU;double y = quaternion.y()/modulusU*expW*sinU;double z = quaternion.z()/modulusU*expW*sinU;Eigen::Quaterniond expQ(x,y,z,w);return expQ;
}
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!