使用MPU6050计算方向盘角度
我给你们作了榜样、叫你们照着我向你们所作的去作。
——【约翰福音13:15】
1.前言
前段时间接到一个项目需求:使用现有的陀螺仪MPU6050实现计算当前车辆的方向盘角度。
2.需求分析
MPU6050可获取三轴角速度和三轴加速度,并通过算法可以获得横滚角、俯仰角、航向角。
方向盘角度旋转会同步引起车轮的角度变化,方向盘旋转角度与车轮角度是一个已知量,可从实际车辆设计中获得,本次需求的车辆中方向盘旋转角度与前车轮的角度关系为:
左转时,方向盘角度范围 0~610°,车轮角度0~28°;
右转时,方向盘角度范围0~720°,车轮角度0~37°。
车辆在行驶时,若方向盘有角度,则一定在某个圆上绕圈,通过查找资料发现,其实每一个轮胎都在各自的圆上绕圈,并且最关键的是 这些圆的圆心在同一个点上,如下图(网上找的):
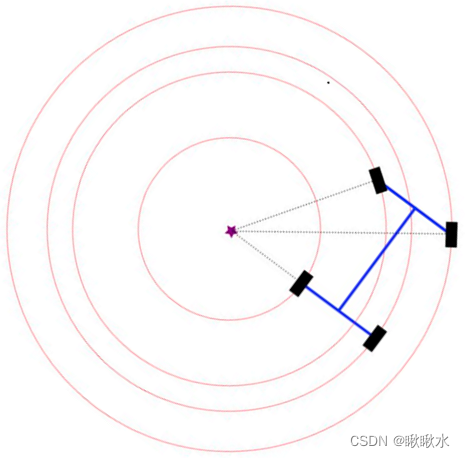
按照上图,我们尝试分析,车辆在行驶过程中左转的转弯角度;左前轮和左后轮并圆心组成一个直角三角形,并且很容易看出,转弯角度(左前轮与前进方向的夹角)就是圆心角。
3.相关公式
根据上面的分析,我们可以从角度这个关键点去列出所有相关公式:
- A = 610°/28° //!<方向盘角度与车轮角度的关系,左转比例因子A
- S = V * t //!<圆弧长S = 车速V * 时间t
- L = 2π * r //!<圆周长L = 2π * 半径r
- D = |d| //!<角速度D = 角速度初始值d的绝对值
- α = D * t //!<转弯角度α = 角速度D *时间t
- α/360° = S/L //!<转弯角度α / 圆周角度360° = 圆弧长S / 圆周长L
- B/r = sinθ //!<轴距B / 半径r = sin(车轮角度θ)
- P = A *θ //!<方向盘旋转角度P = 比例因子A * 车轮角度θ
所以 左转时,P = A * arcsin(2π*|d|*B/(V*360°))
同样右转时也可以列出公式,所以要求方向盘角度需要的输入参数为:
比例因子A、角速度D、轴距B、车速V
其中比例因子A为实际车辆的固定值,角速度D可以从MPU6050中获取,轴距B就是车前轮圆心和车后轮圆心的距离,也为实际车辆的固定值,车速V可以实时从整车CAN中获取。
最后使用算法实现以上公式,便可求出当前方向盘角度。
4.结论
将以上算法应用到实际车辆后,实际测试结果均可基本满足测量需求。不过也存在一个缺点,就是当车速为零时,无法计算当前方向盘角度。另外现在新生产的车辆一般都会安装带有角度测量的方向盘,所以以上解决方案可用在后装车辆上。
本篇博文仅作记录。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!