坐标系转换--三维七参数大地坐标系转换模型变换关系理解
三维七参数大地坐标系转换模型变换关系理解
[ Δ L Δ B Δ H ] = [ − sin L ( N + H ) cos B ρ cos L ( N + H ) cos B ρ 0 − sin B cos L M + H ρ − sin B sin L M + H ρ cos B M + H ρ cos B cos L sin B sin L sin B ] [ T x T y T z ] + [ N ( 1 − e 2 ) + H N + H tan B cos L N ( 1 − e 2 ) + H N + H tan B sin L − 1 − ( N + H ) − N e 2 sin 2 B M + H sin L ( N + H ) − N e 2 sin 2 B M + H cos L 0 − N e 2 sin B cos B sin L ρ N e 2 sin B cos B cos L ρ 0 ] [ R x R y R z ] + [ 0 − N M e 2 sin B cos B ρ ( N + H ) − N e 2 sin 2 B ] D + [ 0 0 N M a e 2 sin B cos B ρ 2 − e 2 s i n 2 B 1 − f sin B cos B ρ − N a ( 1 − e 2 sin 2 B ) M 1 − a ( 1 − e 2 sin 2 B ) sin 2 B ] [ Δ a Δ f ] (1) \tag{1} \begin{bmatrix} \varDelta L \\ \varDelta B \\ \varDelta H \end{bmatrix} = \begin{bmatrix} -\frac{ \sin{L} }{ (N+H)\cos{B} }\rho & \frac{ \cos{L} }{ (N+H)\cos{B} }\rho & 0 \\ \\ -\frac{\sin{B}\cos{L}}{M+H}\rho & -\frac{\sin{B}\sin{L}}{M+H}\rho & \frac{\cos{B}}{M+H}\rho \\ \\ \cos{B}\cos{L} & \sin{B}\sin{L} & \sin{B} \end{bmatrix} \begin{bmatrix} T_x \\ T_y \\ T_z \end{bmatrix} + \\ \begin{bmatrix} \frac{N(1-e^2)+H}{N+H}\tan{B}\cos{L} & \frac{N(1-e^2)+H}{N+H}\tan{B}\sin{L} & -1 \\ \\ -\frac{(N+H)-Ne^2\sin^2{B}}{M+H}\sin{L} & \frac{(N+H)-Ne^2\sin^2{B}}{M+H}\cos{L} & 0 \\ \\ -\frac{Ne^2\sin{B}\cos{B}\sin{L}}{\rho} & \frac{Ne^2\sin{B}\cos{B}\cos{L}}{\rho} & 0 \end{bmatrix} \begin{bmatrix} R_x \\ R_y \\ R_z \end{bmatrix} + \\ \begin{bmatrix} 0 \\ \\ -\frac{N}{M}e^2\sin{B}\cos{B}\rho \\ \\ (N+H)-Ne^2\sin^2{B} \end{bmatrix}D + \\ \begin{bmatrix} 0 & 0 \\ \\ \frac{N}{Ma}e^2\sin{B}\cos{B}\rho & \frac{2-e^2sin^2B}{1-f}\sin{B}\cos{B}\rho \\ \\ -\frac{N}{a}(1-e^2\sin^2{B}) & \frac{M}{1-a}(1-e^2\sin^2{B})\sin^2{B} \end{bmatrix} \begin{bmatrix} \varDelta{a} \\ \varDelta{f} \end{bmatrix} ⎣ ⎡ΔLΔBΔH⎦ ⎤=⎣ ⎡−(N+H)cosBsinLρ−M+HsinBcosLρcosBcosL(N+H)cosBcosLρ−M+HsinBsinLρsinBsinL0M+HcosBρsinB⎦ ⎤⎣ ⎡TxTyTz⎦ ⎤+⎣ ⎡N+HN(1−e2)+HtanBcosL−M+H(N+H)−Ne2sin2BsinL−ρNe2sinBcosBsinLN+HN(1−e2)+HtanBsinLM+H(N+H)−Ne2sin2BcosLρNe2sinBcosBcosL−100⎦ ⎤⎣ ⎡RxRyRz⎦ ⎤+⎣ ⎡0−MNe2sinBcosBρ(N+H)−Ne2sin2B⎦ ⎤D+⎣ ⎡0MaNe2sinBcosBρ−aN(1−e2sin2B)01−f2−e2sin2BsinBcosBρ1−aM(1−e2sin2B)sin2B⎦ ⎤[ΔaΔf](1)
式中: 式中: 式中:
e 2 :第一偏心率的平方,无量纲 e 2 = 2 f − f 2 ; e^2:第一偏心率的平方,无量纲e^2=2f-f^2; e2:第一偏心率的平方,无量纲e2=2f−f2;
M :地球椭球子午圈曲率半径,单位为米 ( m ) , M = a ( 1 − e 2 ) ( 1 − e 2 sin 2 B ) 3 2 ; M:地球椭球子午圈曲率半径,单位为米(m),M=\frac{a(1-e^2)}{(1-e^2\sin^2{B})^{\frac{3}{2}}}; M:地球椭球子午圈曲率半径,单位为米(m),M=(1−e2sin2B)23a(1−e2);
N :地球椭球卯酉圈曲率半径,单位为米 ( m ) , N = a ( 1 − e 2 sin 2 B ) 1 2 ; N:地球椭球卯酉圈曲率半径,单位为米(m),N=\frac{a}{(1-e^2\sin^2{B})^{\frac{1}{2}}}; N:地球椭球卯酉圈曲率半径,单位为米(m),N=(1−e2sin2B)21a;
B , L , H :点位纬度、经度、大地高,经纬度单位为弧度 ( r a d ) ,大地高单位为米 ( m ) ; B,L,H:点位纬度、经度、大地高,经纬度单位为弧度(rad),大地高单位为米(m); B,L,H:点位纬度、经度、大地高,经纬度单位为弧度(rad),大地高单位为米(m);
Δ B , Δ L , Δ H :点位在两个坐标系下的纬度差、经度差、大地高差,经纬度差值单位为角秒 ( ′ ′ ) , 大地高差值单位为米 ( m ) ; \varDelta{B},\varDelta{L},\varDelta{H}:点位在两个坐标系下的纬度差、经度差、大地高差,经纬度差值单位为角秒(''),\\ 大地高差值单位为米(m); ΔB,ΔL,ΔH:点位在两个坐标系下的纬度差、经度差、大地高差,经纬度差值单位为角秒(′′),大地高差值单位为米(m);
ρ :角度与弧度间转换量,单位为角秒 ( ′ ′ ) , ρ = 180 × 3600 π ; \rho:角度与弧度间转换量,单位为角秒(''),\rho=180 \times \frac{3600}{\pi}; ρ:角度与弧度间转换量,单位为角秒(′′),ρ=180×π3600;
a , Δ a :椭球长半轴和长半轴差,单位为米 ( m ) ; a,\varDelta{a}:椭球长半轴和长半轴差,单位为米(m); a,Δa:椭球长半轴和长半轴差,单位为米(m);
f , Δ f :椭球扁率和扁率差,无量纲; f,\varDelta{f}:椭球扁率和扁率差,无量纲; f,Δf:椭球扁率和扁率差,无量纲;
T x , T y , T z :平移参数,单位为米 ( m ) ; T_x,T_y,T_z:平移参数,单位为米(m); Tx,Ty,Tz:平移参数,单位为米(m);
R x , R y , R z :旋转参数,单位为角秒 ( ′ ′ ) ; R_x,R_y,R_z:旋转参数,单位为角秒(''); Rx,Ry,Rz:旋转参数,单位为角秒(′′);
D :尺度参数,无量纲。 D:尺度参数,无量纲。 D:尺度参数,无量纲。
令 令 令
a 0 = − sin L ( N + H ) cos B ρ , a 1 = cos L ( N + H ) cos B ρ , a_0=-\frac{ \sin{L} }{ (N+H)\cos{B} }\rho,a_1=\frac{ \cos{L} }{ (N+H)\cos{B} }\rho, a0=−(N+H)cosBsinLρ,a1=(N+H)cosBcosLρ,
a 3 = − sin B cos L M + H ρ , a 4 = − sin B sin L M + H ρ , a 5 = cos B M + H ρ , a_3=-\frac{\sin{B}\cos{L}}{M+H}\rho,a_4=-\frac{\sin{B}\sin{L}}{M+H}\rho,a_5=\frac{\cos{B}}{M+H}\rho, a3=−M+HsinBcosLρ,a4=−M+HsinBsinLρ,a5=M+HcosBρ,
a 6 = cos B cos L , a 7 = sin B sin L , a 8 = sin B a_6=\cos{B}\cos{L},a_7=\sin{B}\sin{L},a_8=\sin{B} a6=cosBcosL,a7=sinBsinL,a8=sinB
b 0 = N ( 1 − e 2 ) + H N + H tan B cos L , b 1 = N ( 1 − e 2 ) + H N + H tan B sin L , b_0=\frac{N(1-e^2)+H}{N+H}\tan{B}\cos{L},b_1=\frac{N(1-e^2)+H}{N+H}\tan{B}\sin{L}, b0=N+HN(1−e2)+HtanBcosL,b1=N+HN(1−e2)+HtanBsinL,
b 3 = − ( N + H ) − N e 2 sin 2 B M + H sin L , b 4 = ( N + H ) − N e 2 sin 2 B M + H cos L , b_3=-\frac{(N+H)-Ne^2\sin^2{B}}{M+H}\sin{L},b_4=\frac{(N+H)-Ne^2\sin^2{B}}{M+H}\cos{L}, b3=−M+H(N+H)−Ne2sin2BsinL,b4=M+H(N+H)−Ne2sin2BcosL,
b 6 = − N e 2 sin B cos B sin L ρ , b 7 = N e 2 sin B cos B cos L ρ , b_6=-\frac{Ne^2\sin{B}\cos{B}\sin{L}}{\rho},b_7=\frac{Ne^2\sin{B}\cos{B}\cos{L}}{\rho}, b6=−ρNe2sinBcosBsinL,b7=ρNe2sinBcosBcosL,
c 1 = − N M e 2 sin B cos B ρ c_1=-\frac{N}{M}e^2\sin{B}\cos{B}\rho c1=−MNe2sinBcosBρ
c 2 = ( N + H ) − N e 2 sin 2 B c_2=(N+H)-Ne^2\sin^2{B} c2=(N+H)−Ne2sin2B
d 2 = N M a e 2 sin B cos B ρ , d 3 = 2 − e 2 s i n 2 B 1 − f sin B cos B ρ d_2=\frac{N}{Ma}e^2\sin{B}\cos{B}\rho,d_3=\frac{2-e^2sin^2B}{1-f}\sin{B}\cos{B}\rho d2=MaNe2sinBcosBρ,d3=1−f2−e2sin2BsinBcosBρ
d 4 = − N a ( 1 − e 2 sin 2 B ) , d 5 = M 1 − a ( 1 − e 2 sin 2 B ) sin 2 B d_4=-\frac{N}{a}(1-e^2\sin^2{B}),d_5=\frac{M}{1-a}(1-e^2\sin^2{B})\sin^2{B} d4=−aN(1−e2sin2B),d5=1−aM(1−e2sin2B)sin2B
则 ( 1 ) 式变换为: 则(1)式变换为: 则(1)式变换为:
[ Δ L Δ B Δ H ] = [ a 0 a 1 0 a 3 a 4 a 5 a 6 a 7 a 8 ] [ T x T y T z ] + [ b 0 b 1 − 1 b 3 b 4 0 b 6 b 7 0 ] [ R x R y R z ] + [ 0 c 1 c 2 ] D + [ 0 0 d 2 d 3 d 4 d 5 ] [ Δ a Δ f ] = [ a 0 T x + a 1 T y + 0 T z + b 0 R x + b 1 R y − 1 R z + 0 D a 3 T x + a 4 T y + a 5 T z + b 3 R x + b 4 R y + 0 R z + c 1 D a 6 T x + a 7 T y + a 8 T z + b 6 R x + b 7 R y + 0 R z + c 2 D ] + [ 0 d 2 Δ a + d 3 Δ f d 4 Δ a + d 5 Δ f ] (2) \tag{2} \begin{bmatrix} \varDelta L \\ \varDelta B \\ \varDelta H \end{bmatrix} = \begin{bmatrix} a_0 & a_1 & 0 \\ a_3 & a_4 & a_5 \\ a_6 & a_7 & a_8 \\ \end{bmatrix} \begin{bmatrix} T_x \\ T_y \\ T_z \end{bmatrix} + \begin{bmatrix} b_0 & b_1 & -1 \\ b_3 & b_4 & 0 \\ b_6 & b_7 & 0 \\ \end{bmatrix} \begin{bmatrix} R_x \\ R_y \\ R_z \end{bmatrix} + \begin{bmatrix} 0 \\ c_1 \\ c_2 \end{bmatrix}D + \begin{bmatrix} 0 & 0 \\ d_2 & d_3 \\ d_4 & d_5 \\ \end{bmatrix} \begin{bmatrix} \varDelta{a} \\ \varDelta{f} \end{bmatrix} \\ = \begin{bmatrix} a_0T_x+a_1T_y+ 0T_z+b_0R_x+b_1R_y-1R_z+0D \\ a_3T_x+a_4T_y+a_5T_z+b_3R_x+b_4R_y+0R_z+c_1D \\ a_6T_x+a_7T_y+a_8T_z+b_6R_x+b_7R_y+0R_z+c_2D \\ \end{bmatrix} + \begin{bmatrix} 0 \\ d_2\varDelta{a} + d_3\varDelta{f} \\ d_4\varDelta{a} + d_5\varDelta{f} \\ \end{bmatrix} ⎣ ⎡ΔLΔBΔH⎦ ⎤=⎣ ⎡a0a3a6a1a4a70a5a8⎦ ⎤⎣ ⎡TxTyTz⎦ ⎤+⎣ ⎡b0b3b6b1b4b7−100⎦ ⎤⎣ ⎡RxRyRz⎦ ⎤+⎣ ⎡0c1c2⎦ ⎤D+⎣ ⎡0d2d40d3d5⎦ ⎤[ΔaΔf]=⎣ ⎡a0Tx+a1Ty+0Tz+b0Rx+b1Ry−1Rz+0Da3Tx+a4Ty+a5Tz+b3Rx+b4Ry+0Rz+c1Da6Tx+a7Ty+a8Tz+b6Rx+b7Ry+0Rz+c2D⎦ ⎤+⎣ ⎡0d2Δa+d3Δfd4Δa+d5Δf⎦ ⎤(2)
又 ∵ 又\because 又∵
[ a 0 T x + a 1 T y + 0 T z + b 0 R x + b 1 R y − 1 R z + 0 D a 3 T x + a 4 T y + a 5 T z + b 3 R x + b 4 R y + 0 R z + c 1 D a 6 T x + a 7 T y + a 8 T z + b 6 R x + b 7 R y + 0 R z + c 2 D ] = [ P 1 P 2 P 3 P 4 P 5 P 6 P 7 P 8 P 9 P 10 P 11 P 12 P 13 P 14 P 15 P 16 P 17 P 18 P 19 P 20 P 21 ] [ T x T y T z R x R y R z D ] \begin{bmatrix} a_0T_x+a_1T_y+ 0T_z+b_0R_x+b_1R_y-1R_z+0D \\ a_3T_x+a_4T_y+a_5T_z+b_3R_x+b_4R_y+0R_z+c_1D \\ a_6T_x+a_7T_y+a_8T_z+b_6R_x+b_7R_y+0R_z+c_2D \\ \end{bmatrix} = \begin{bmatrix} P_1 & P_2 & P_3 & P_4 & P_5 & P_6 & P_7 \\ P_8 & P_9 & P_{10} & P_{11} & P_{12} & P_{13} & P_{14} \\ P_{15} & P_{16} & P_{17} & P_{18} & P_{19} & P_{20} & P_{21} \end{bmatrix} \begin{bmatrix} T_x \\ T_y \\ T_z \\ R_x \\ R_y \\ R_z \\ D \end{bmatrix} ⎣ ⎡a0Tx+a1Ty+0Tz+b0Rx+b1Ry−1Rz+0Da3Tx+a4Ty+a5Tz+b3Rx+b4Ry+0Rz+c1Da6Tx+a7Ty+a8Tz+b6Rx+b7Ry+0Rz+c2D⎦ ⎤=⎣ ⎡P1P8P15P2P9P16P3P10P17P4P11P18P5P12P19P6P13P20P7P14P21⎦ ⎤⎣ ⎡TxTyTzRxRyRzD⎦ ⎤
⇒ \Rarr ⇒
P 1 = a 0 , P 2 = a 1 , P 3 = 0 , P 4 = b 0 , P 5 = b 1 , P 6 = − 1 , P 7 = 0 , P 8 = a 3 , P 9 = a 4 , P 10 = a 5 , P 11 = b 3 , P 12 = b 4 , P 13 = 0 , P 14 = c 1 P 15 = a 6 , P 16 = a 7 , P 17 = a 8 , P 18 = b 6 , P 19 = b 7 , P 20 = 0 , P 21 = c 2 P_1=a_0, P_2=a_1, P_3=0, P_4=b_0, P_5=b_1, P_6=-1, P_7=0, \\ P_8=a_3, P_9=a_4, P_{10}=a_5,P_{11}=b_3,P_{12}=b_4,P_{13}=0,P_{14}=c_1 \\ P_{15}=a_6,P_{16}=a_7,P_{17}=a_8,P_{18}=b_6,P_{19}=b_7,P_{20}=0,P_{21}=c_2 P1=a0,P2=a1,P3=0,P4=b0,P5=b1,P6=−1,P7=0,P8=a3,P9=a4,P10=a5,P11=b3,P12=b4,P13=0,P14=c1P15=a6,P16=a7,P17=a8,P18=b6,P19=b7,P20=0,P21=c2
∴ ( 2 ) 式变换为: \therefore (2)式变换为: ∴(2)式变换为:
[ Δ L Δ B Δ H ] = [ a 0 a 1 0 b 0 b 1 − 1 0 a 3 a 4 a 5 b 3 b 4 0 c 1 a 6 a 7 a 8 b 6 b 7 0 c 2 ] [ T x T y T z R x R y R z D ] + [ 0 d 2 Δ a + d 3 Δ f d 4 Δ a + d 5 Δ f ] (3) \tag{3} \begin{bmatrix} \varDelta L \\ \varDelta B \\ \varDelta H \end{bmatrix} = \begin{bmatrix} a_0 & a_1 & 0 & b_0 & b_1 & -1 & 0 \\ a_3 & a_4 & a_5 & b_3 & b_4 & 0 & c_1 \\ a_6 & a_7 & a_8 & b_6 & b_7 & 0 & c_2 \end{bmatrix} \begin{bmatrix} T_x \\ T_y \\ T_z \\ R_x \\ R_y \\ R_z \\ D \end{bmatrix} + \begin{bmatrix} 0 \\ d_2\varDelta{a} + d_3\varDelta{f} \\ d_4\varDelta{a} + d_5\varDelta{f} \\ \end{bmatrix} ⎣ ⎡ΔLΔBΔH⎦ ⎤=⎣ ⎡a0a3a6a1a4a70a5a8b0b3b6b1b4b7−1000c1c2⎦ ⎤⎣ ⎡TxTyTzRxRyRzD⎦ ⎤+⎣ ⎡0d2Δa+d3Δfd4Δa+d5Δf⎦ ⎤(3)
基于最小二乘与多对同名点对计算参数
设存在 n 对同名点对: ( L a , B a , H a ) 1 → ( L b , B b , H b ) 1 , ⋯ , ( L a , B a , H a ) n → ( L b , B b , H b ) n . 设存在n对同名点对:(L_a,B_a,H_a)_1 \rarr (L_b,B_b,H_b)_1,\cdots,(L_a,B_a,H_a)_n \rarr (L_b,B_b,H_b)_n. 设存在n对同名点对:(La,Ba,Ha)1→(Lb,Bb,Hb)1,⋯,(La,Ba,Ha)n→(Lb,Bb,Hb)n.
令 令 令
θ = [ T x T y T z R x R y R z D ] \theta =\begin{bmatrix} T_x \\ T_y \\ T_z \\ R_x \\ R_y \\ R_z \\ D \end{bmatrix} θ=⎣ ⎡TxTyTzRxRyRzD⎦ ⎤
Δ L i = ( L b − L a ) i , Δ B i = ( B b − B a ) i , Δ H i = ( H b − H a ) i \varDelta{L}_i=(L_b-L_a)_i,\varDelta{B}_i=(B_b-B_a)_i,\varDelta{H}_i=(H_b-H_a)_i ΔLi=(Lb−La)i,ΔBi=(Bb−Ba)i,ΔHi=(Hb−Ha)i
v i = ( Δ L − 0 , Δ B − ( d 2 Δ a + d 3 Δ f ) , Δ H − ( d 4 Δ a + d 5 Δ f ) ) i T , v_i=(\varDelta{L} - 0,\varDelta{B} - (d_2\varDelta{a} + d_3\varDelta{f}),\varDelta{H} - (d_4\varDelta{a} + d_5\varDelta{f}))^T_i, vi=(ΔL−0,ΔB−(d2Δa+d3Δf),ΔH−(d4Δa+d5Δf))iT,
P i = [ a 0 a 1 0 b 0 b 1 − 1 0 a 3 a 4 a 5 b 3 b 4 0 c 1 a 6 a 7 a 8 b 6 b 7 0 c 2 ] i , P_i= \begin{bmatrix} a_0 & a_1 & 0 & b_0 & b_1 & -1 & 0 \\ a_3 & a_4 & a_5 & b_3 & b_4 & 0 & c_1 \\ a_6 & a_7 & a_8 & b_6 & b_7 & 0 & c_2 \end{bmatrix}_i, Pi=⎣ ⎡a0a3a6a1a4a70a5a8b0b3b6b1b4b7−1000c1c2⎦ ⎤i,
i = 1 , ⋯ , n i=1,\cdots,n i=1,⋯,n
根据式 ( 3 ) ,代入样本值得到方程组如下: 根据式(3),代入样本值得到方程组如下: 根据式(3),代入样本值得到方程组如下:
{ P 1 θ = v 1 P 2 θ = v 2 ⋮ P n θ = v n \begin{dcases} P_1\theta = v_1 \\ P_2\theta = v_2 \\ \vdots \\ P_n\theta = v_n \end{dcases} ⎩ ⎨ ⎧P1θ=v1P2θ=v2⋮Pnθ=vn
则变换为矩阵方程为: 则变换为矩阵方程为: 则变换为矩阵方程为:
v = P θ v = P\theta v=Pθ
P = [ P 1 P 2 ⋮ P n ] , v = [ v 1 v 2 ⋮ v n ] P= \begin{bmatrix} P_1 \\ P_2 \\ \vdots \\ P_n \end{bmatrix}, v= \begin{bmatrix} v_1 \\ v_2 \\ \vdots \\ v_n \end{bmatrix} P=⎣ ⎡P1P2⋮Pn⎦ ⎤,v=⎣ ⎡v1v2⋮vn⎦ ⎤
考虑 v = P θ 无解,需要从 P 的列空间中找出最接近 v 的向量 u ( u 可以理解为 v 在 P 的列空间中的投影,理解如下图所示:) 考虑v = P\theta无解,需要从P的列空间中找出最接近v的向量u(u可以理解为v在P的列空间中的投影,理解如下图所示:) 考虑v=Pθ无解,需要从P的列空间中找出最接近v的向量u(u可以理解为v在P的列空间中的投影,理解如下图所示:)
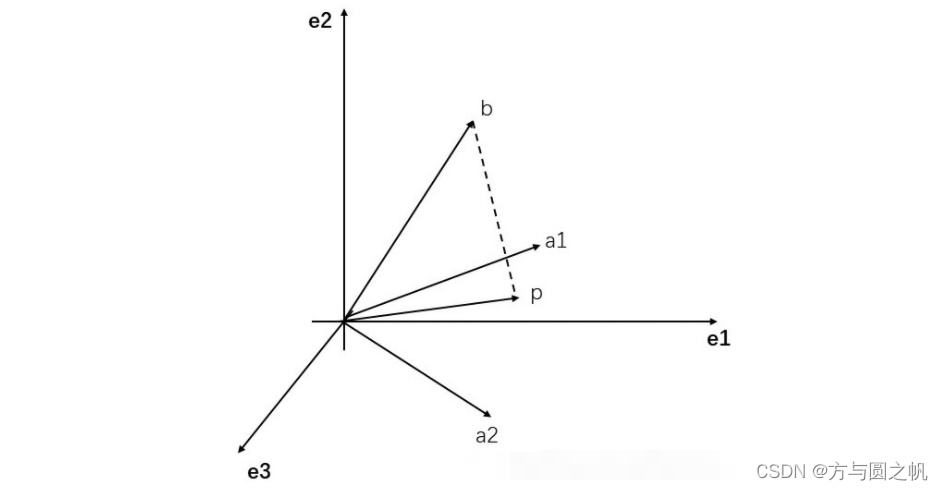
如上图所示, p 是 b 在 [ a 1 a 2 ] 列空间中的投影。 如上图所示,p是b在\begin{bmatrix} a_1 & a_2 \end{bmatrix} 列空间中的投影。 如上图所示,p是b在[a1a2]列空间中的投影。
令 e = v − u ,最小二乘就是找到 ∥ e ∥ 2 最小的点,最小二乘就是指向量长度的最小平方。 令e=v-u,最小二乘就是找到\parallel e \parallel^2最小的点,最小二乘就是指向量长度的最小平方。 令e=v−u,最小二乘就是找到∥e∥2最小的点,最小二乘就是指向量长度的最小平方。
由上可知, u 位于 P 的列空间中,即 u 是 P 的各列的线性组合: 由上可知,u位于P的列空间中,即u是P的各列的线性组合: 由上可知,u位于P的列空间中,即u是P的各列的线性组合:
令 P 的列空间为 P = [ C 1 C 2 ⋯ C m ] 令P的列空间为 P= \begin{bmatrix} C_1 & C_2 & \cdots & C_m \end{bmatrix} 令P的列空间为P=[C1C2⋯Cm]
故存在 u = C 1 θ 1 ~ + C 2 θ 2 ~ + ⋯ + C m θ m ~ 故存在 u=C_1\tilde{\theta_1} + C_2\tilde{\theta_2} + \cdots + C_m\tilde{\theta_m} 故存在u=C1θ1~+C2θ2~+⋯+Cmθm~
即 P θ ~ = u 有解。 即P\tilde{\theta}=u有解。 即Pθ~=u有解。
e = v − u = v − P θ ~ e=v-u=v-P\tilde{\theta} e=v−u=v−Pθ~
e 正交于 P 的列空间,存在: e正交于P的列空间,存在: e正交于P的列空间,存在:
e ⊥ C 1 , e ⊥ C 2 , ⋯ , e ⊥ C m e \perp C_1,e \perp C_2,\cdots,e \perp C_m e⊥C1,e⊥C2,⋯,e⊥Cm
由向量点积关系式可得: 由向量点积关系式可得: 由向量点积关系式可得:
⇒ { C 1 T ( v − P θ ~ ) = 0 C 2 T ( v − P θ ~ ) = 0 ⋮ C m T ( v − P θ ~ ) = 0 \Rarr \begin{dcases} C_1^T(v-P\tilde{\theta})=0 \\ C_2^T(v-P\tilde{\theta})=0 \\ \vdots \\ C_m^T(v-P\tilde{\theta})=0 \end{dcases} ⇒⎩ ⎨ ⎧C1T(v−Pθ~)=0C2T(v−Pθ~)=0⋮CmT(v−Pθ~)=0
⇒ [ C 1 T C 2 T C 3 T ⋮ C m T ] ( v − P θ ~ ) = [ 0 0 0 ⋮ 0 ] \Rarr \begin{bmatrix} C_1^T \\ C_2^T \\ C_3^T \\ \vdots \\ C_m^T \end{bmatrix} (v-P\tilde{\theta})= \begin{bmatrix} 0 \\ 0 \\ 0 \\ \vdots \\ 0 \end{bmatrix} ⇒⎣ ⎡C1TC2TC3T⋮CmT⎦ ⎤(v−Pθ~)=⎣ ⎡000⋮0⎦ ⎤
∵ P = [ C 1 C 2 ⋯ C m ] \because P= \begin{bmatrix} C_1 & C_2 & \cdots & C_m \end{bmatrix} ∵P=[C1C2⋯Cm]
∴ P T = [ C 1 T C 2 T ⋮ C m T ] \therefore P^T = \begin{bmatrix} C_1^T \\ C_2^T \\ \vdots \\ C_m^T \end{bmatrix} ∴PT=⎣ ⎡C1TC2T⋮CmT⎦ ⎤
⇒ P T ( v − P θ ~ ) = 0 \Rarr P^T(v-P\tilde{\theta})=0 ⇒PT(v−Pθ~)=0
⇒ P T P θ ~ = P T v \Rarr P^TP\tilde{\theta}=P^Tv ⇒PTPθ~=PTv
⇒ θ ~ = ( P T P ) − 1 P T v \Rarr \tilde{\theta}=(P^TP)^{-1}P^Tv ⇒θ~=(PTP)−1PTv
即 θ ~ = ( P T P ) − 1 P T v 为基于最小二乘计算出来的最接近实际参数的转换值 即\tilde{\theta}=(P^TP)^{-1}P^Tv为基于最小二乘计算出来的最接近实际参数的转换值 即θ~=(PTP)−1PTv为基于最小二乘计算出来的最接近实际参数的转换值
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!