【Apollo自动驾驶-从理论到代码】cyber/node模块
/* 作者水平有限,欢迎批评指正,内容持续完善中!!*/
Apollo Cyber Component
- 主要文件
- 类图
- 处理流程
- Node特点及须知
- 代码详解
- CreateNode函数的调用点
- Node的构造函数
- NodeChannelImpl的构造函数
- NodeServiceImpl的构造函数
- 创建Reader
- 创建Writer、Service、Client
- Reader的实质创建
- Reader类型的选择
- Reader的Init()过程
主要文件
| 文件名 | 描述 | 作用 |
|---|---|---|
| reader_base.h | Reader的基类 | |
| reader.h | Reader类 | |
| writer_base.h | Writer的基类 | |
| writer.h | Writer类 | |
| node_channel_impl.h | reader writer的具体实现 | |
| node_service_impl.h | service client的具体实现 | |
| node.cc | 节点是CyberRT中的基本单元,每个模块都包含一个节点,并且相互之间使用节点通信。一个模块可以定义不同的通信方式在一个节点中,如read/write or/and service/client。 | |
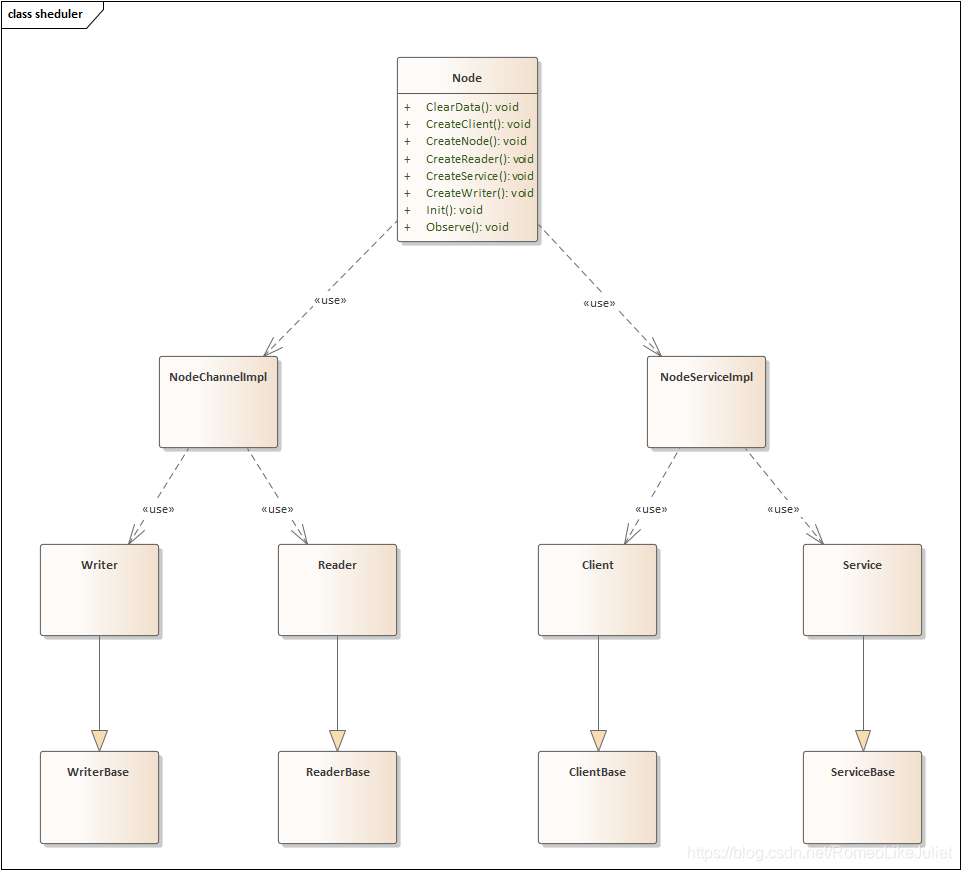
类图
处理流程
Node特点及须知
- Node中可以创建Reader、Writer、Service、Client对象。
- 其中上面提到的Reader、Writer、Service、Client对象由对应的类创建。
- 根据要创建的类型,选择NodeChannelImpl或者NodeServiceImpl类进行Reader、Writer、Service、Client对象的创建。
代码详解
由于node目录和service目录的关联性较大,下面将会一起介绍两处的代码。
CreateNode函数的调用点
在Node类中,使用了友元函数CreateNode()。该函数位于命名空间apollo::cyber中,在模块代码中,会通过调用该函数创建节点Node,如:
./modules/canbus/tools/teleop.cc:97: node_ = CreateNode("teleop");
./modules/data/tools/smart_recorder/realtime_record_processor.cc:120: smart_recorder_node_ = CreateNode(absl::StrCat("smart_recorder_", getpid()));
./modules/routing/tools/routing_cast.cc:33: apollo::cyber::CreateNode("routing_cast"));
那现在深入到CreateNode函数中,该函数位于cyber.cc中,cyber.cc文件中只定义了一个CreateNode函数,由此可见,Node和Cyber的密切关系:
namespace apollo {
namespace cyber {using apollo::cyber::common::GlobalData;
using apollo::cyber::proto::RunMode;std::unique_ptr<Node> CreateNode(const std::string& node_name,const std::string& name_space) {bool is_reality_mode = GlobalData::Instance()->IsRealityMode();if (is_reality_mode && !OK()) {// add some hint logAERROR << "please initialize cyber firstly.";return nullptr;}return std::unique_ptr<Node>(new Node(node_name, name_space));
}
如上,在CreateNode函数中,直接返回了Node类型的对象,这里真正创建了Node对象。并且传入了node_name、name_space作为参数。下面进入到node.h文件中,关注节点的实际创建过程。
Node的构造函数
首先在Node的构造函数中,使用node_name创建了NodeChannelImpl和NodeServiceImpl对象。后面会分析二者的创建与执行过程。
Node::Node(const std::string& node_name, const std::string& name_space): node_name_(node_name), name_space_(name_space) {node_channel_impl_.reset(new NodeChannelImpl(node_name));node_service_impl_.reset(new NodeServiceImpl(node_name));
}NodeChannelImpl的构造函数
此处只是做了简单的初始化工作。如果是真实模式的话,会启动node_manager。
/*** @brief Construct a new Node Channel Impl object** @param node_name node name*/explicit NodeChannelImpl(const std::string& node_name): is_reality_mode_(true), node_name_(node_name) {node_attr_.set_host_name(common::GlobalData::Instance()->HostName());node_attr_.set_host_ip(common::GlobalData::Instance()->HostIp());node_attr_.set_process_id(common::GlobalData::Instance()->ProcessId());node_attr_.set_node_name(node_name);uint64_t node_id = common::GlobalData::RegisterNode(node_name);node_attr_.set_node_id(node_id);is_reality_mode_ = common::GlobalData::Instance()->IsRealityMode();if (is_reality_mode_) {node_manager_ =service_discovery::TopologyManager::Instance()->node_manager();node_manager_->Join(node_attr_, RoleType::ROLE_NODE);}}
NodeServiceImpl的构造函数
创建Reader
下面以teleop.cc文件为例,介绍如何创建reader及writer。同时带大家进入相关底层代码一探究竟。如下代码,分别调用了node_对象的两个接口CreateReader和CreateWriter创建reader和writer。
./modules/canbus/tools/teleop.cc:97: node_ = CreateNode("teleop");chassis_reader_ = node_->CreateReader<Chassis>(FLAGS_chassis_topic, [this](const std::shared_ptr<Chassis> &chassis) {OnChassis(*chassis);});control_command_writer_ =node_->CreateWriter<ControlCommand>(FLAGS_control_command_topic);在node.h文件中,CreateReader函数共有三个重载函数,意味着会根据创建时刻的传递类型,进行重载。如下为三个函数的实现,三者的区别为第一个参数分别为RoleAttributes、ReaderConfig、string。具体差别见代码中的注释。由此可知,这里主要做了配置参数的初始化。最终使用模板函数node_channel_impl_->template CreateReader()创建reader。
//使用RoleAttributes创建Reader。
//config: 包括channel name, qos
//reader_func: 当消息到达时的回调函数
template <typename MessageT>
auto Node::CreateReader(const proto::RoleAttributes& role_attr,const CallbackFunc<MessageT>& reader_func)-> std::shared_ptr<Reader<MessageT>> {std::lock_guard<std::mutex> lg(readers_mutex_);if (readers_.find(role_attr.channel_name()) != readers_.end()) {AWARN << "Failed to create reader: reader with the same channel already ""exists.";return nullptr;}auto reader = node_channel_impl_->template CreateReader<MessageT>(role_attr, reader_func);if (reader != nullptr) {readers_.emplace(std::make_pair(role_attr.channel_name(), reader));}return reader;
}//使用reader config创建Reader。
//config: 包括channel name, qos ,pending queue size
//reader_func: 当消息到达时的回调函数
template <typename MessageT>
auto Node::CreateReader(const ReaderConfig& config,const CallbackFunc<MessageT>& reader_func)-> std::shared_ptr<cyber::Reader<MessageT>> {std::lock_guard<std::mutex> lg(readers_mutex_);if (readers_.find(config.channel_name) != readers_.end()) {AWARN << "Failed to create reader: reader with the same channel already ""exists.";return nullptr;}auto reader =node_channel_impl_->template CreateReader<MessageT>(config, reader_func);if (reader != nullptr) {readers_.emplace(std::make_pair(config.channel_name, reader));}return reader;
}//使用channel name创建Reader。qos和其他配置使用默认。
//channel_name: reader订阅的channel
//reader_func: 当消息到达时的回调函数
template <typename MessageT>
auto Node::CreateReader(const std::string& channel_name,const CallbackFunc<MessageT>& reader_func)-> std::shared_ptr<Reader<MessageT>> {std::lock_guard<std::mutex> lg(readers_mutex_);if (readers_.find(channel_name) != readers_.end()) {AWARN << "Failed to create reader: reader with the same channel already ""exists.";return nullptr;}auto reader = node_channel_impl_->template CreateReader<MessageT>(channel_name, reader_func);if (reader != nullptr) {readers_.emplace(std::make_pair(channel_name, reader));}return reader;
}
对于上面三个接口,可用表格总结如下:
| 参数 | 参数内容 |
|---|---|
| channel_name | channel名字,采用默认qos、其他配置 |
| ReaderConfig | channel名字、qos、pending queue size |
| RoleAttributes | channel名字、qos等 |
创建Writer、Service、Client
结合上面Reader的创建过程,Writer、Service、Client的创建类似。总的来说,会根据不同的参数类型,选择不同的重载函数,从而创建不同的对象。下面用表格方式进行全局展示,前文中各概念的关系。
| 文件名 | 函数 | 作用 |
|---|---|---|
| cyber.h | CreateNode(const std::string& node_name,const std::string& name_space) | 创建节点,返回Node类型对象_node |
| node.h | CreateWriter(const proto::RoleAttributes& role_attr) | 根据RoleAttributes创建writer,_node调用时指定 |
| node.h | CreateWriter(const std::string& channel_name) | 根据channel_name创建writer,_node调用时指定 |
| node.h | CreateReader(const ReaderConfig& config, reader_func) | 根据ReaderConfig创建reader,_node调用时指定 |
| node.h | CreateReader(const std::string& channel_name, reader_func) | 根据channel_name创建reader,_node调用时指定 |
| node.h | CreateReader(const proto::RoleAttributes& role_attr, reader_func) | 根据RoleAttributes创建reader,_node调用时指定 |
| node.h | CreateService(const std::string& service_name, service_callback) | 根据string创建service,_node调用时指定 |
| node.h | CreateClient(const std::string& service_name,) | 根据string创建client,_node调用时指定 |
| node_channel_impl.h | CreateWriter(const proto::RoleAttributes& role_attr) | 根据RoleAttributes创建 |
| node_channel_impl.h | CreateWriter(const std::string& channel_name) | 根据channel_name创建 |
| node_channel_impl.h | CreateReader(const std::string& channel_name) | 根据channel_name创建 |
| node_channel_impl.h | CreateReader(const ReaderConfig& config) | 根据ReaderConfig创建 |
| node_channel_impl.h | CreateReader(const proto::RoleAttributes& role_attr) | 根据RoleAttributes创建 |
| node_service_impl.h | CreateService(const std::string& service_name) | 根据string创建 |
| node_service_impl.h | CreateClient(const std::string& service_name) | 根据string创建 |
Reader的实质创建
Reader类型的选择
在node_channel_impl.h中经过函数重载,最终的Reader的创建使用下面函数,参数有三个:
| 参数名 | 含义 |
|---|---|
| const proto::RoleAttributes& role_attr | 主要包括通道名、QOS规则之类的 |
| const CallbackFunc | 消息到达的回调执行函数 |
| uint32_t pending_queue_size | 挂起队列大小 |
根据是否为实时模式,使用不同的Reader类创建对象,然后执行reader的Init函数。
template <typename MessageT>
auto NodeChannelImpl::CreateReader(const proto::RoleAttributes& role_attr,const CallbackFunc<MessageT>& reader_func,uint32_t pending_queue_size)-> std::shared_ptr<Reader<MessageT>> {if (!role_attr.has_channel_name() || role_attr.channel_name().empty()) {AERROR << "Can't create a reader with empty channel name!";return nullptr;}proto::RoleAttributes new_attr(role_attr);FillInAttr<MessageT>(&new_attr);std::shared_ptr<Reader<MessageT>> reader_ptr = nullptr;if (!is_reality_mode_) {reader_ptr =std::make_shared<blocker::IntraReader<MessageT>>(new_attr, reader_func);} else {reader_ptr = std::make_shared<Reader<MessageT>>(new_attr, reader_func,pending_queue_size);}RETURN_VAL_IF_NULL(reader_ptr, nullptr);RETURN_VAL_IF(!reader_ptr->Init(), nullptr);return reader_ptr;
}
Reader的Init()过程
在Reader的构造函数中,除了处理入参外,还对blocker_进行了初始化。对象构造完成后,会调用Init()函数进行初始化。下面在代码中进行注释说明初始化的过程。
template <typename MessageT>
bool Reader<MessageT>::Init() {if (init_.exchange(true)) {return true;}//此处根据reader_func创建lamba表达式(未命名的内联函数),其实就是消息真正执行者。std::function<void(const std::shared_ptr<MessageT>&)> func;if (reader_func_ != nullptr) {func = [this](const std::shared_ptr<MessageT>& msg) {this->Enqueue(msg);this->reader_func_(msg);};} else {func = [this](const std::shared_ptr<MessageT>& msg) { this->Enqueue(msg); };}//重点介绍:
//这里调用了单实例的sched,全局调度模块。使用节点名称和通道名称作为协程的ID。
//通过协程工厂,将前面的func函数和dv进行关联,并放入sched创建Task。auto sched = scheduler::Instance();croutine_name_ = role_attr_.node_name() + "_" + role_attr_.channel_name();auto dv = std::make_shared<data::DataVisitor<MessageT>>(role_attr_.channel_id(), pending_queue_size_);// Using factory to wrap templates.croutine::RoutineFactory factory =croutine::CreateRoutineFactory<MessageT>(std::move(func), dv);if (!sched->CreateTask(factory, )) {AERROR << "Create Task Failed!";init_.store(false);return false;}//创建当前Node的receiver,并且加入拓扑网络中,后面会介绍TopologyManager的具体作用,在Topo中如何进行发现与通信。receiver_ = ReceiverManager<MessageT>::Instance()->GetReceiver(role_attr_);this->role_attr_.set_id(receiver_->id().HashValue());channel_manager_ =service_discovery::TopologyManager::Instance()->channel_manager();JoinTheTopology();return true;
}
/未完待续/
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!