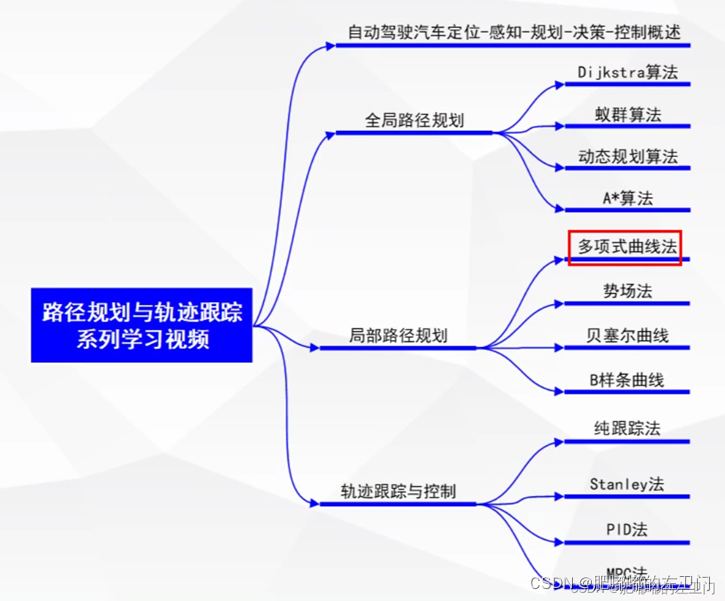
局部路径规划:五次多项式
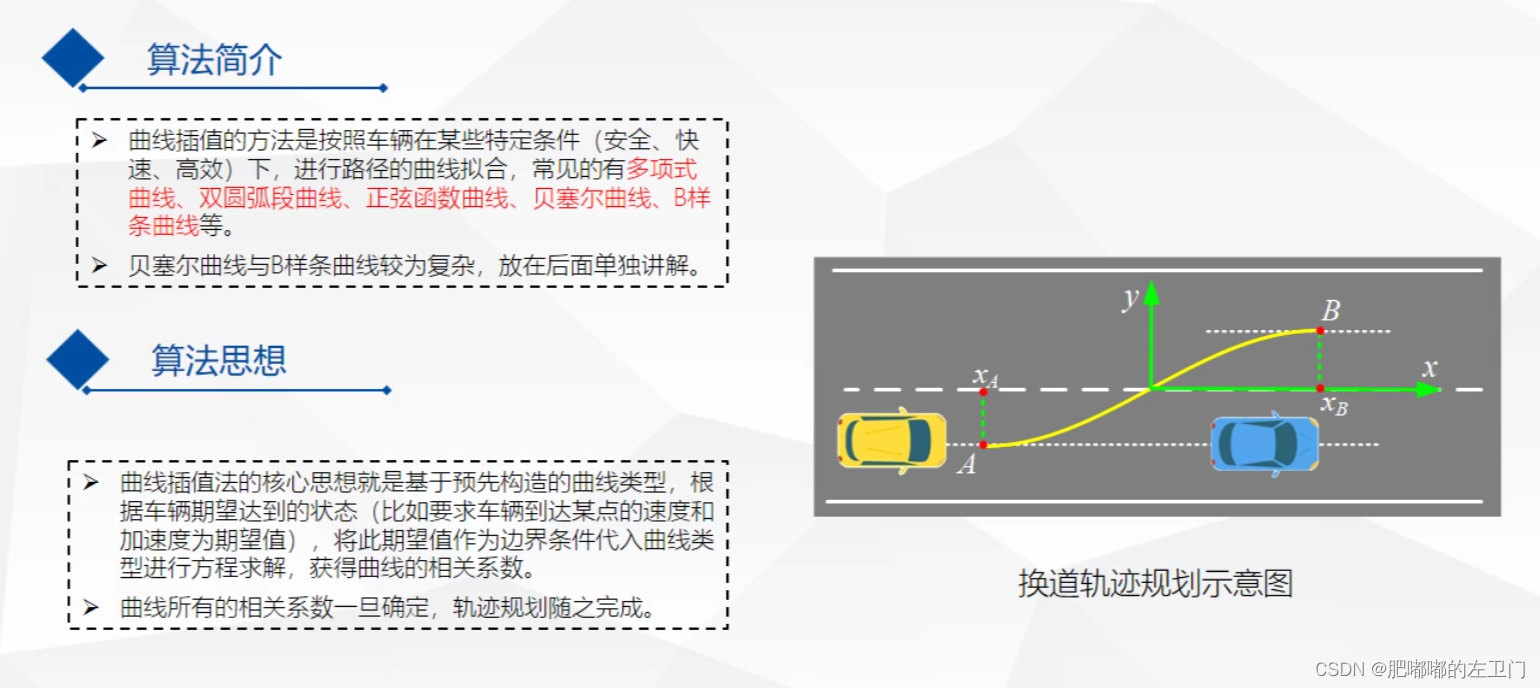
重点注意:进行曲线插值时,分2步:
1,确定所用的曲线类型,即确定曲线的表达式方程,比如多项式曲线,双圆弧段曲线,正弦函数曲线,贝塞尔曲线,B样条曲线等。
2,用现有点的已知条件(位置,速度,加速度等)求解曲线的未知系数,一旦未知系数确定,则曲线的表达式就唯一的确定了。
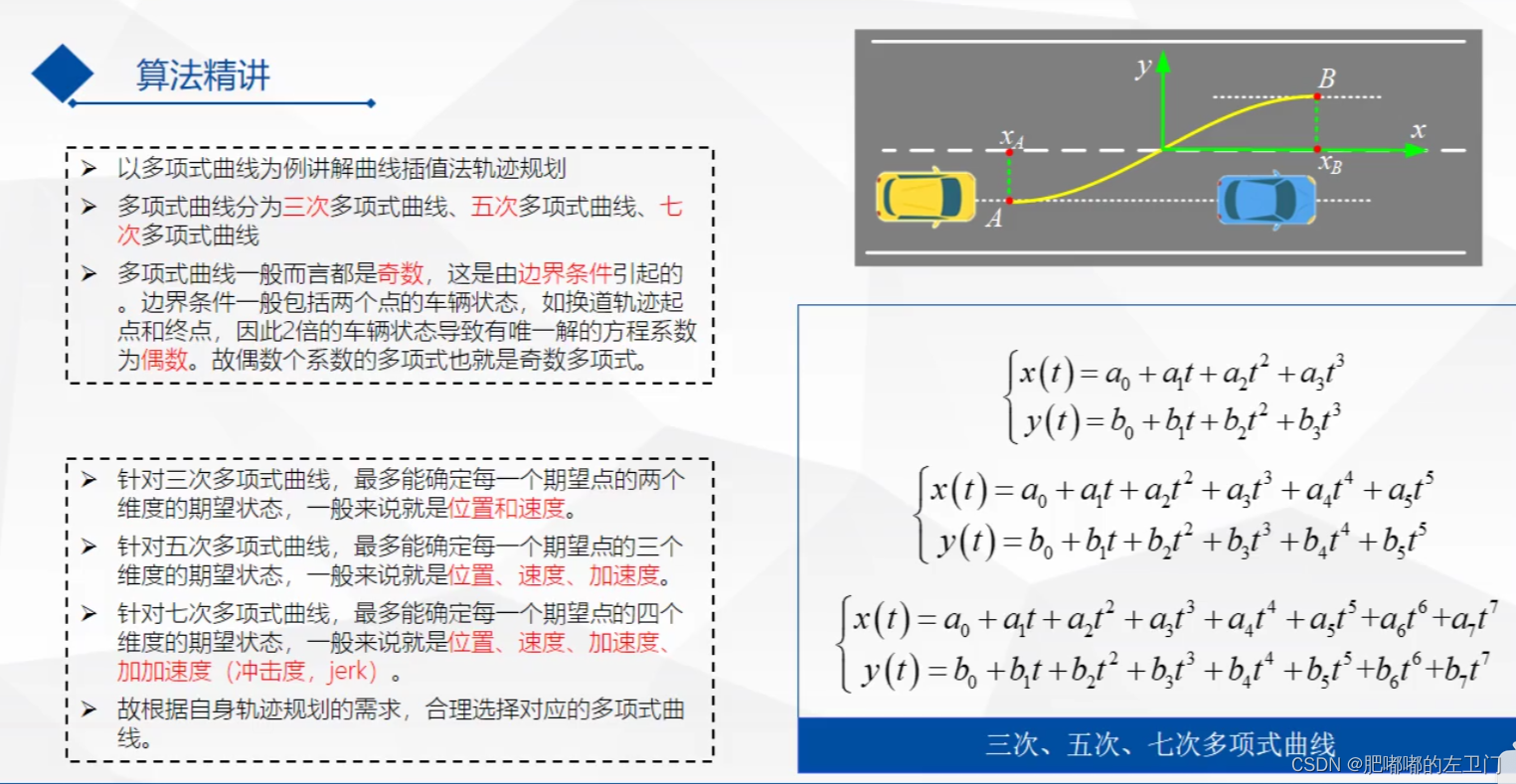
以换道场景为例,曲线是x与y分别关于t的五次多项式,而不是笛卡尔坐标系下y关于x的五次多项式(可参考文章:https://blog.csdn.net/ChenGuiGan/article/details/123072922),故生成的轨迹含有t,所以一旦路径生成了,对应的速度也就生成并确定了,即路径和速度规划是强耦合的。但笛卡尔坐标系下的五次曲线,因为没有t,故仅仅是路径规划,后期需要重新设计速度规划,故实现了路径和速度规划的解耦,优先推荐此方法:
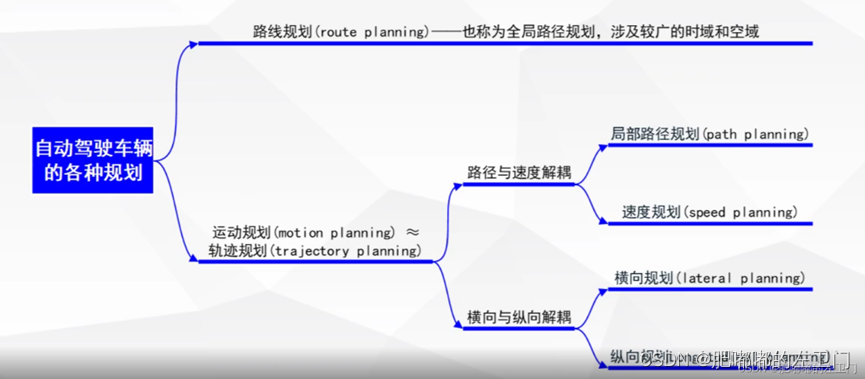
横纵向解耦分别进行规划的方法:
横向和纵向分别用多项式曲线进行分别规划,即横纵向分别对应着2个不同的多项式曲线,然后根据时间t进行合并即可得到横纵向联合控制的曲线,即最终规划的曲线。
!!!重点且易错点一定注意:横向Y和纵向X分别是关于t的五次多项式,但最终合并的曲线Y不是关于X的五次多项式,即最终的曲线不是五次多项式,而是横纵向五次多项式的融合结果。
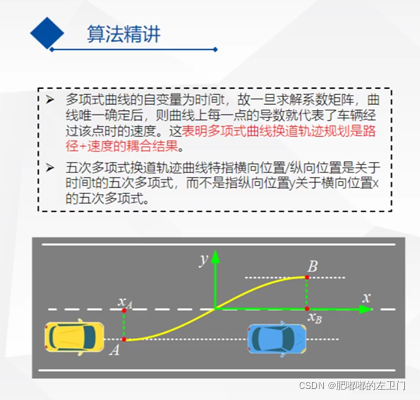
多项式曲线规划的特点:路径和速度是强耦合关系,路径求导就是速度。
问题:速度的方向是如何确定的???横纵向方向的矢量和就是最终的速度方向。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!