LaTex 入门教程
阅读本文的条件:
使用的环境:Ubuntu 18.04,VsCode, TexLive,其中在VsCode已经配置完成编译环境。
首先安装TexLive,不建议通过百度查找教程,建议对照官方安装教程进行安装,可以参考:
https://tug.org/texlive/quickinstall.html
安装Vscode的过程就不写了,这个倒是可以找个教程看一眼就行了,在vscode中需要安装如下插件
1. 在桌面或其他任一目录下新建文件夹 latex_learn
mkdir latex_learn
2. 通过VsCode打开文件夹latex_learn
3.新建文件
在VsCode中新建文件learn.tex文件,tex为latex文件的默认后缀名。
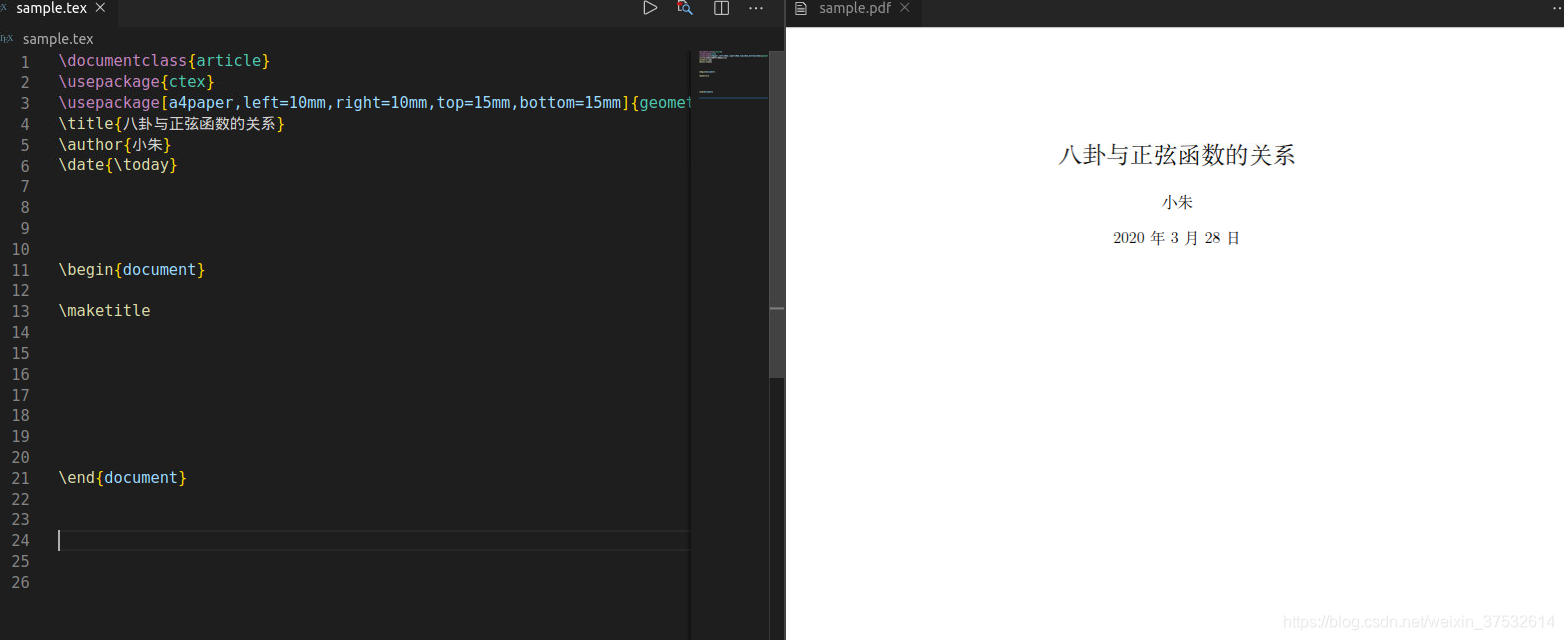
4. 在文件中放入如下内容:
\documentclass{article}
\usepackage{ctex}
\usepackage[a4paper,left=10mm,right=10mm,top=15mm,bottom=15mm]{geometry}
\title{八卦与正弦函数的关系}
\author{小朱}
\date{\today}
\begin{document}
\maketitle
\end{document}
其中:
\documentcalss{article} :指定文档的类型
\usepackage{ctex} :包含文档里需要用到的包,这里需要写中文,因此需要包含ctex包
\usepackage[a4paper,left=10mm,right=10mm,top=15mm,bottom=15mm]{geometry}:包含设置文档页面的包,使用a4纸张,左右边距 10mm,上下边距 15mm。
\title{八卦与正弦函数的关系}:指定文档标题
\author{小朱}:指定文档作者
\date{\today}:指定文档创作日期
\begin{document}
\end{document}:begin与end之间之间为文档的正文内容
\maketitle:将文档的标题放到正文中去
5. 保存文件
在Vscode右侧选择TeX按钮,然后build latex project,然后View LaTex PDF,如果正常的话就可以看到VsCode里的并排窗口了。
6. 添加摘要
在\maketitle下面添加
\begin{abstract}提出了一种基于右侧单通道摄像头的泊车车位检测算法。而且算法具有较强的鲁棒性。
\end{abstract}
7. 添加子章节:
\section{图像预处理}
自动泊车过程中,在摄像头的真实工况下,将受到光照不均匀、光照强度变化等环境因素的干扰;
为了提高后续车位检测的精度及算法对环境的鲁棒性,需先对图像进行预处理。\par
真实环境中的光照不均、光照强度的变化都会直接影响图像边缘提取过程的准确度,
给后续的检测带来不可预测的后果。
其中: \par表示另起一段,也可以通过空一行的方式首先换行。
8. 添加目录
在\maketitle下面添加
\tableofcontents
9. 添加角注
\footnote{WANG Guoli, ZHOU Wei, YAO Libo. SAR image target detection based
on multi-scale auto-convolution variance saliency[J]. Radar Conference 2013,
IET International, 2013, 28(1).}
10. 添加引用
引用测试:
\begin{quote}这是一段引用
\end{quote}
11. 修改字体
{\kaishu 这是一段引用}
在ctex包中提供了快速修改字体的办法。
12. 添加图片
\begin{figure}[htbp]
\centering
\includegraphics[width = 6cm]{test.jpg}
\caption{三维效果图}
\end{figure}
其中:htbp指定图片格式,
\centering:图片居中
\includegraphics[width = 6cm]{test.jpg}:图片宽度,以及需要添加的图片名字
\caption{三维效果图}: 图标题
13. 插入表格
\begin{table}[htbp]
\centering
\caption{测试表}
\begin{tabular}{cccccccc}
\hline
一&二&三&四&五&六&七&八\\
\hline
1&2&3&4&5&6&7&8\\
\hline
\end{tabular}
\end{table}
其中:
\begin{tabular} \end{tabular} : 表的内容放着这个标识符环境里面。
{cccccccc} : c的数量表示列的数量,c表示居中,l表示靠左,r表示靠右。
1&2&3&4&5&6&7&8\ &表示单元格分割 \ 表示一行结束
14. 行间公式
插入sin符号
行间公式,符号,$\sin$正弦是一种周期函数。
15. 列表公式
插入一个单独的公式
\begin{equation}
y=\sin(x)
\end{equation}
16. 换页标志
\newpage
17. 交叉引用
引用的地方 \ref{标签名}
\label{结果引用}: 创建标签
如图\ref{结果引用}所示。\begin{figure}[htbp]
\centering
\includegraphics[width = 6cm]{test2.jpg}
\caption{变换结果}\label{结果引用}\end{figure}
总结:
\documentclass{article}
\usepackage{ctex}
\usepackage[a4paper,left=10mm,right=10mm,top=15mm,bottom=15mm]{geometry}
\usepackage{graphicx}
\title{基于图像识别的泊车车位检测算法研究}
\author{小朱}
\date{\today}
\begin{document}\maketitle
\tableofcontents
\newpage
\begin{abstract}提出了一种基于右侧单通道摄像头的泊车车位检测算法。而且算法具有较强的鲁棒性。
\end{abstract}\section{图像预处理}
自动泊车过程中,在摄像头的真实工况下,将受到光照不均匀、光照强度变化等环境因素的干扰;为了提高后续车位检测的精度及算法对环境的鲁棒性,需先对图像进行预处理。真实环境中的光照不均、光照强度的变化都会直接影响图像边缘提取过程的准确度,给后续的检测带来不可预测的后果。\section{车位线提取}
图像在拍摄的过程以及传输的过程中总是会引入各种形式的噪声,本文中,在识别算法之前先对图像进行高斯滤波操作\footnote{WANG Guoli, ZHOU Wei, YAO Libo. SAR image target detection based on multi-scale auto-convolution variance saliency[J]. Radar Conference 2013, IET International, 2013, 28(1).}。\par
引用测试:
\begin{quote}{\kaishu 这是一段引用}
\end{quote}\begin{figure}[htbp]
\centering
\includegraphics[width = 6cm]{test.jpg}
\caption{三维效果图}
\end{figure}\begin{table}[htbp]
\centering
\caption{测试表}
\begin{tabular}{cccccccc}
\hline
一&二&三&四&五&六&七&八\\
\hline
1&2&3&4&5&6&7&8\\
\hline
\end{tabular}
\end{table}\section{车位线检测}
本文定义车位主方向为车位的长边方向,次方向为短边方向,车位线为直线。\par
行间公式,符号,$\sin$正弦是一种周期函数。
列表公式:
\begin{equation}
y=\sin(x)
\end{equation}通过压缩Radon变换区间的方式可以降低Radon矩阵维度,降低后续计算复杂度,但矩阵中仍包含了车位线的完整信息,结果如图\ref{结果引用}所示。\begin{figure}[htbp]
\centering
\includegraphics[width = 6cm]{test2.jpg}
\caption{变换结果}\label{结果引用}
\end{figure}\end{document}
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!