三维空间刚体运动
三维空间刚体运动
参考书目 《视觉SLAM十四讲》 高翔 张涛 等著
参考链接 https://zhuanlan.zhihu.com/p/32937868
一、 旋转矩阵
1. 点、向量和坐标系
我们一般用三维空间中的点来表示我们的物体,向量来表示点在空间中的移动,简单定义在这边不再赘述。
假定我们现在有向量 a 和 b a和b a和b 用 < a , b >
2. 坐标系间的欧式变换
对于两个坐标系之间的变化,我们可以用 一个旋转和一个平移 表示,这种运动称为 刚体运动 。
我们的 欧式变换 就是由 旋转和平移 组成。假定我们某点在 [ e 1 , e 2 , e 3 ] T [e_1,e_2,e_3]^T [e1,e2,e3]T 坐标系下坐标为 [ a 1 , a 2 , a 3 ] T [a_1,a_2,a_3]^T [a1,a2,a3]T , 在 [ e 1 ′ , e 2 ′ , e 3 ′ ] [{e_1}^{'},{e_2}^{'},{e_3}^{'}] [e1′,e2′,e3′] 下坐标为 [ a 1 ′ , a 2 ′ , a 3 ′ ] T [{a_1}^{'},{a_2}^{'},{a_3}^{'}]^T [a1′,a2′,a3′]T 。
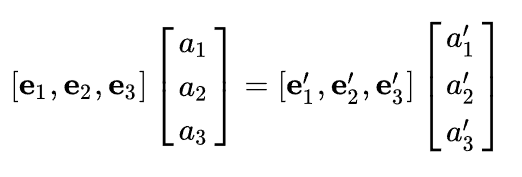
我们对左右两边同乘 [ e 1 T , e 2 T , e 3 T ] T [{e_1}^{T},{e_2}^{T},{e_3}^{T}]^T [e1T,e2T,e3T]T ,左边的系数就变成了单位矩阵。
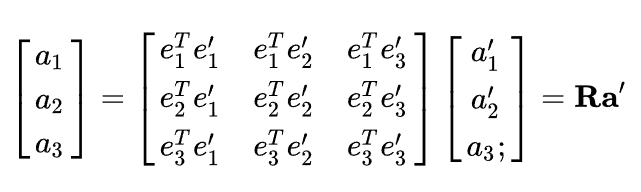
我们把中间的矩阵定义为 R 旋 转 矩 阵 ( R o t a t i o n M a t r i x ) R旋转矩阵(Rotation \quad Matrix) R旋转矩阵(RotationMatrix) , 该矩阵各分量是两个坐标系基的内积,由于基向量模长为1,所以实际上为各基向量夹角的余弦值,所以这个矩阵也称为 方向余弦矩阵(Direction Cosine Matrix) ,或者 旋转矩阵 。
旋转矩阵是行列式为1的正交矩阵,反之,行列式为1的矩阵也是一个旋转矩阵。 我们可以将旋转矩阵的集合定义如下,称为 特殊正交群 。
S O ( n ) = { R ∈ R n × n ∣ R R T = I , d e t ( R ) = 1 } SO(n) = \{ R \in R^{n \times n} |RR^T=I, det(R)=1 \} SO(n)={R∈Rn×n∣RRT=I,det(R)=1}
通过旋转矩阵,就可以直接谈论两个坐标系之间的旋转变化,而不用再从基谈起。
在欧式变换中当我们把旋转和平移写在一个式子中,如下
a 1 = R 12 a 2 + t 12 a_1 = R_{12} a_2 + t_{12} a1=R12a2+t12
其中 a 1 , a 2 a_1,a_2 a1,a2 分别代表 a 在两个坐标系下的坐标, R 12 R_{12} R12 为把坐标系2的向量变换到坐标系1, t 12 t_{12} t12 代表平移向量。这样我们就可以实现一个点在两个坐标系下的转换。
3. 变换矩阵和齐次坐标
我们上面引入的变换公式不是线性关系,当进行多次变换的话,算出的结果会很复杂,所以我们引入齐次坐标和变换矩阵。
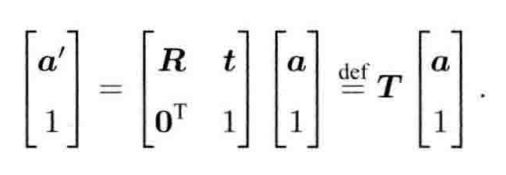
这样写的好处是可以把旋转和平移写在一个矩阵内,使得整个关系变成线性关系。矩阵 T 称为 变换矩阵(Transform Matrix) 。这个矩阵又被称为 特殊欧式群(Special Euclidean Group) 。

二、 旋转向量和欧拉角
1. 旋转向量
在三维空间中,任意旋转都可以用 一个旋转轴和一个旋转角 来刻画,我们定义一个向量,方向与旋转轴一致,长度等于旋转角,这种向量被称为 旋转向量(轴角/角轴,Axis-Angle) ,只需要一个三维向量即可描述旋转。
假定旋转轴为一个单位长度的向量 n ,角度为 θ \theta θ ,那么向量 θ n \theta n θn 可表示这个旋转。从旋转向量到旋转矩阵的转换公式由 罗德里格斯公式(Rodrigues’s Formula) 表明。
R = c o s θ I + ( 1 − c o s θ ) n n T + s i n θ n ^ R = cos \theta I + (1-cos \theta )nn^T+ sin \theta \hat n R=cosθI+(1−cosθ)nnT+sinθn^
我们也可以反推出 $ \theta $ 公式。
θ = a r c c o s t r ( R ) − 1 2 \theta = arccos \frac {tr(R)-1}{2} θ=arccos2tr(R)−1
关于转轴 n 在旋转之后不发生改变
R n = n Rn = n Rn=n
2. 欧拉角
除了旋转向量,我们也可以用 欧拉角 来紧凑地描述旋转。一个旋转可以分解成3次分别绕X,Y,Z 轴的旋转来表示,在航空摄影测量中,一般用 “翻转 - 航偏 - 俯仰”(roll - yaw - pitch) ,也即 XZY 来表示。先绕X 轴旋转roll 角度,再绕Y 轴旋转yaw 角度,最后按照Z 轴旋转pitch 角度。这三个旋转矩阵相乘就得到了总的旋转矩阵。
此时,就可以用 [ r , p , y ] T [r,p,y]^T [r,p,y]T 这三个量来描述任意旋转,这种表示方式会比其他方式更直观、更易理解。
但欧拉角会有一个重大缺点,就是著名的 万向锁问题(Gimbal Lock) ,在俯仰角为正负90度时,第一次旋转与第三次旋转将使用同一个轴,使得系统失去一个自由度,这被称为 奇异性 问题。
三、 四元数
既然我们已经有了旋转向量和欧拉角,为什么还有个四元数(Quaternion)?因为欧拉角和旋转向量具有奇异性(万向锁问题)。不存在不带有奇异性的三维向量描述方式。因此我们需要用到四元数,它既是紧凑的,也没有奇异性。
定义:一个四元数包含一个实部和三个虚部。
q = q 0 + q 1 i + q 2 j + q 3 k = [ s , v ] q = q_0 + q_1i + q_2j + q_3k = [s,v] q=q0+q1i+q2j+q3k=[s,v]
其中,后面的等式将四元数表达成一个标量和一个向量, i , j , k i,j,k i,j,k 表示四元数的三个虚部,满足:
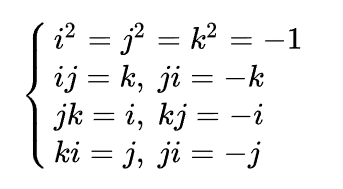
若一个四元数虚部全为0,则它是一个实四元数;如其实部为零,则称它为虚四元素。而且,一个虚四元数对应一个空间点。
我们能用单位四元数来表示三维空间中的任意一个旋转。我们先考虑下复数。在负数中,乘以i 表示在复平面内旋转90度。但在四元数中,情形却有微妙的不同:乘以i 表示旋转180度,这样才能保证 i j = − k ij=-k ij=−k 的性质。而 i 2 = − 1 i^2 = -1 i2=−1 ,说明绕i 轴旋转360度后得到一个相反的东西,而要旋转720度(两周)才能得到它原先的样子。
假设某个旋转的旋转向量为 $ \theta n$ , 则
q = [ c o s θ 2 , n x s i n θ 2 , n y s i n θ 2 , n z s i n θ 2 ] T q=[cos \frac {\theta}{2} ,n_x sin \frac {\theta}{2}, n_ysin \frac {\theta}{2},n_zsin\frac {\theta}{2}]^T q=[cos2θ,nxsin2θ,nysin2θ,nzsin2θ]T
反之则有
θ = 2 a r c c o s q 0 \theta = 2 arccosq_0 θ=2arccosq0
[ n x , n y , n z ] T = [ q 1 , q 2 , q 3 ] T / s i n θ 2 [n_x,n_y,n_z]^T=[q_1,q_2,q_3]^T/sin \frac {\theta}{2} [nx,ny,nz]T=[q1,q2,q3]T/sin2θ
上式给人一种“转了一半”的感觉。将上式中的 θ \theta θ 加上 2 π 2\pi 2π 后得到一个相同的旋转,但是对应的四元数却变成了 − q -q −q . 所以,在四元数中,任意的旋转都可以由两个互为相反数的四元数表示。
而四元数和旋转矩阵的关系为:
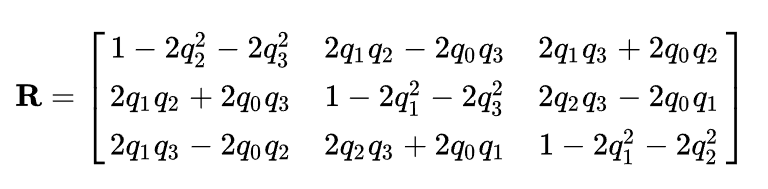
设矩阵 $ R={m_{ij},i,j \in [1,2,3]} $ , 则由上式可以推得:

NOTE: 由于 q 和 − q q和-q q和−q 表示同一个旋转,所以一个旋转矩阵对应的四元数表示并不惟一且存在其他转换公式。在实际中,如果 q 0 q_0 q0 接近于0,会造成其他3个数的解不稳定,应采用其他公式。
总之: 四元数到旋转向量的转换公式为
θ = 2 a r c c o s q 0 \theta = 2arccosq_0 θ=2arccosq0
[ n x , n y , n z ] T = [ q 1 , q 2 , q 3 ] T / s i n θ 2 [n_x,n_y,n_z]^T = [q_1,q_2,q_3]^T/sin \frac {\theta}{2} [nx,ny,nz]T=[q1,q2,q3]T/sin2θ
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!