51智能小车项目
目录
一、任务目标
二、需求分析
三、问题解决
四、总结
一、任务目标
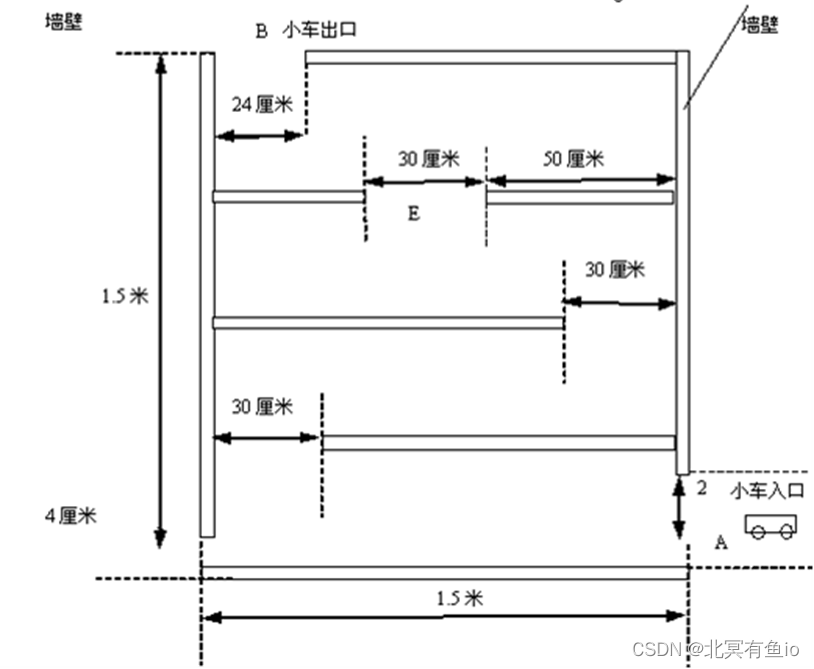
1. 要求小车由起点出发,经过一段无障碍物赛道进入障碍区,赛道段有引导轨迹;障碍区中小车将通过一个建筑物中曲折的道路,矩形建筑物有出入口,障碍区内无引导轨迹(图示);
2. 小车到达障碍区,从入口进入,从出口出来后到达终点,在行进过程中,能自动选择适当的路径,避开墙壁,找到通路,三分钟之内到达出口;到达出口后沿引导轨迹行进到终点。
二、需求分析
1.小车驱动和方向控制
智能小车采用四轮驱动,前后轮左右两边各用一个电机驱动,分别控制四个轮子从而达到前进、后退、转向的目的;利用TTL电平进行控制电机,通过改变芯片控制端的输入电平,即可以对电机进行正转、反转和停止操作;
使用PWM调速系统控制小车行进速度,通过改变电机电枢两端电压的占空比来改变输出电压的有效值,从而达到控制电机转速的目的。整体驱动方案操作方便、稳定性较好。
2.小车循迹
循迹模块安装在小车底部的左右两边,循迹是通过辨别黑白色来行走。工作过程是:红外发射管发出红外光,当遇到黑色,不反射红外光,比较器输出为高电平;当遇脱离黑线,红光反射回来,比较器输出为低电平。当左边检测到白色时将一个电机速度调慢,另一电机速度调快,小车右转,当右边检测到白色时小车左转;当两边检测到的都是黑色时,小车在跑道的正上方,这时控制两电机同速度全速运行,小车前进;当两边检测到的都是白色时小车停止,从而实现在较短时间内完成路线的调整。
3.小车自动避障
避障电路安装在小车头部以检测前方和左前右前方障碍物,工作过程是:单片机根据模块电平的变化判断有无障碍物,当车的左边的传感器检测到障碍物时,主控芯片控制右轮电机停止,左轮转动,车向右方转向,当车的右边传感器检测到障碍物时,主控芯片控制左轮电机停止转动,车向左方转向;当前面有障碍物时规定车右转。
4.车辆整体设计
对于车架材料的选择,选用透明亚克力板材料手工制作,既保证了车架的牢固,又兼顾美观、轻便。使用12V可充电动力电池组为系统提供电源,采用直流电机作为小车系统的驱动电机,采用超声波传感器组成避障系统,用红外传感器进行寻迹。小车进行任务过程中,首先实现循迹功能,到达障碍区后进行自动避障,各模块配合控制小车自动转弯和行进及快慢速行驶。
三、问题解决
1、电机选择问题
电机可以选择采用直流电机或步进电机。直流电机优点是转动力矩大,体积小,重量轻,装配简单,使用方便,小车电机内部装有减速齿轮组,很方便的就可以实现通过单片机对直流减速电机前进、后退、停止等操作;步进电机作为驱动电机,其转动的角度可以精确定位,可以实现小车前进距离和位置的精确定位,调速也更加容易。
本项目中考虑加入电源后的载重能力,车轮固定、整体美观和轻便性等多方面因素,选择直流电机驱动小车。
2.避障模块传感器
项目初选用了红外传感器作为避障功能模块,其原理是根据光线发射头发出的光束,被物体反射,其接收电路据此做出判断反应以检测物体的有无,根据有无光线反射输出不同的电平信号,
在调试过程中发现,由于红外传感器的原理是光信号反射,小车采用的透明亚克力板材料会对其产生一定程度的干扰,导致小车避障失败的bug,后更换超声波传感器作为避障模块。超声波传感器如果接收到反射的超声波,则通知单片机前方有障碍物,以控制小车进行避障;如未接收到反射,则通知单片机可以向前行驶。市场上很多红外光电探头也都是基于这个原理。
更换超声波传感器后小车避障功能可靠性有较好的改善。
3.干扰问题
设计完善的电路应该考虑干扰问题,在编写程序之前,我们对硬件的各部分进行了细致的分工测试,未发现问题。完整功能测试过程中,发现小车出现在前方无障碍物的情况下无缘无故转弯的bug,反复检查程序,无逻辑bug,外设配置正常,由于未考虑到硬件造成干扰的问题,浪费大量时间。后来在程序中加入延时,问题得以解决。
四、总结
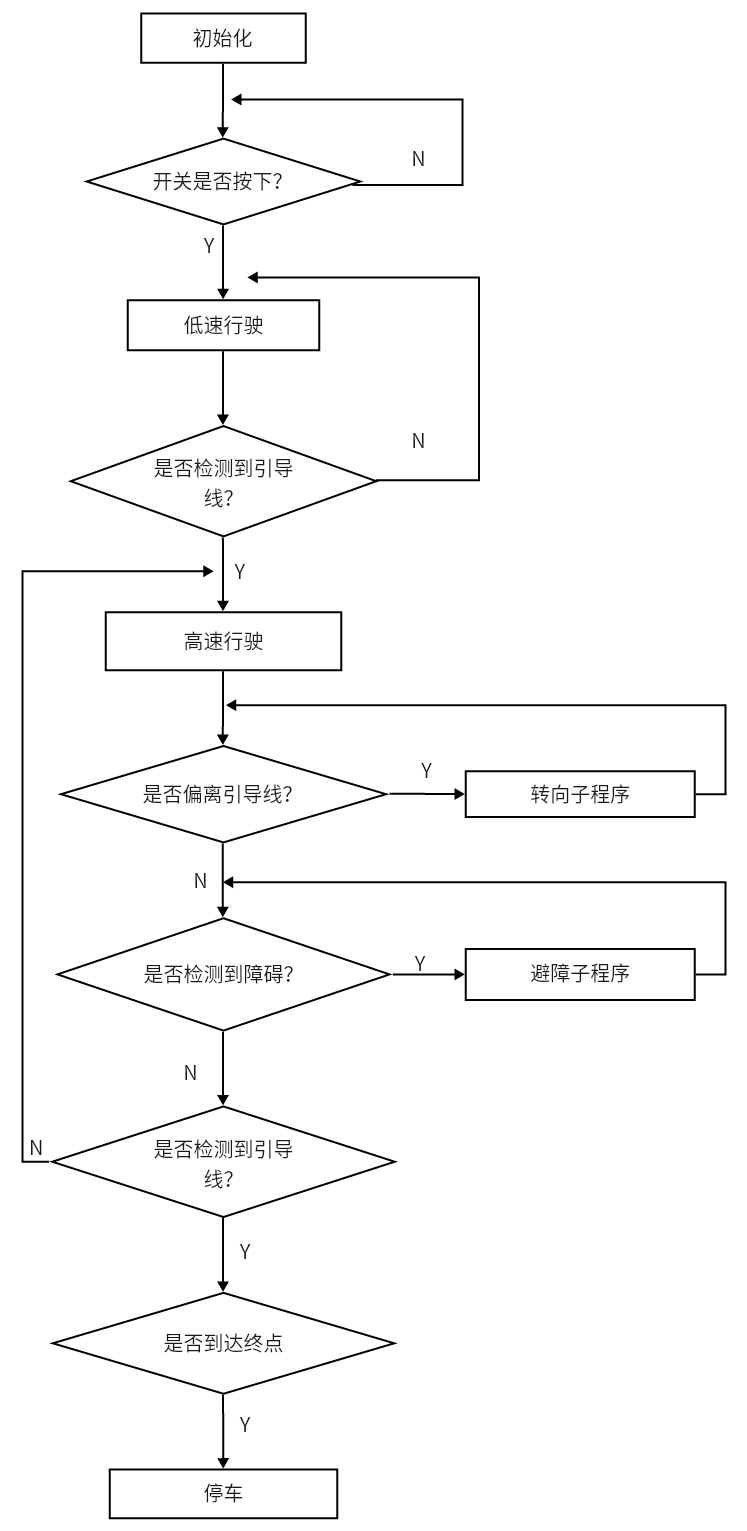
程序设计的整体框图如下:
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!