【毫米波雷达】汽车雷达对发射机和接收机的要求
一、汽车雷达的应用场景:
自适应巡航控制(Adaptive cruise control, ACC)
ACC适用于正常驾驶条件,使行驶速度适应前方车辆,并检测远处的障碍物,避免发生任何事故。这是对信噪比和距离(最大200米)要求最高的用例。ACC处理是由车辆前部的77GHz远程雷达(Long-range radar, LRR)系统实现。
盲点检测(Blind spot detection, BSD)
BSD专用于检测位于驾驶员侧和后部的其他车辆,目的是警告驾驶员那些几乎看不到车辆,进而避免潜在的碰撞。在距离要求高达20米的情况下,24GHz和77GHz系统可适用。
短程雷达(Short-range radar, SRR)
SRR由24GHz系统覆盖,该系统位于车辆周围(前、后、侧或车辆四个角),应用于如BSD、车辆停止和起步或泊车辅助,所有这些都是在车辆以较低的行驶速度和较小的总距离(<20m)行驶下完成的。
中程雷达(Medium-range radar, MRR)
MRR用于BSD、车辆停止和起步场景,范围有限(可达40米)。根据具体的使用情况,传感器安装在汽车周围(四个角),使用24GHz系统。不过,77GHz也会用于中程。
远程雷达(Long-range radar, LRR)
LRR是应用于ACC的雷达技术(77GHz)。传感器安装在车辆前部,以便探测前方的其他车辆或障碍物。
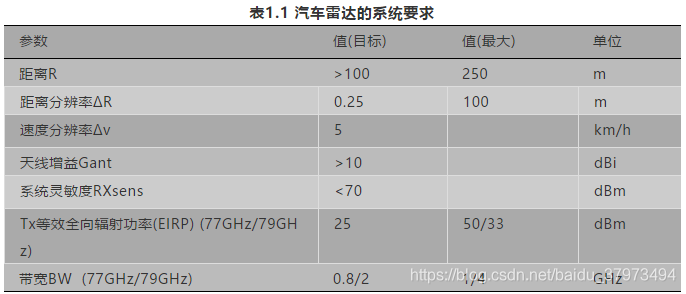
二、汽车雷达系统要求:
尽管目前24GHz车载雷达作为解决方案已经广泛部署,但在当前的新设计中使用的是77GHz。重点关注是距离和速度分辨率。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!