【ROS基础】 一分钟带你教你:如何使用SolidWorks建模并转化为urdf格式
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨
📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】
📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉
📢:内容若有错误,敬请留言 📝指正!原创文,转载注明出处
文章目录
- 一、在SolidWorks中建模
- 1.1 绘制零件并选择材料
- 1.2 装配零件
- 二、配置参数
- 2.1 添加坐标系和转轴
- 2.2 URDF Exportor的配置
- 三、保存为urdf文件
- 3.1 插件安装
- 3.2 导出
- 3.3 显示
- 3.4 上色
- references

一、在SolidWorks中建模
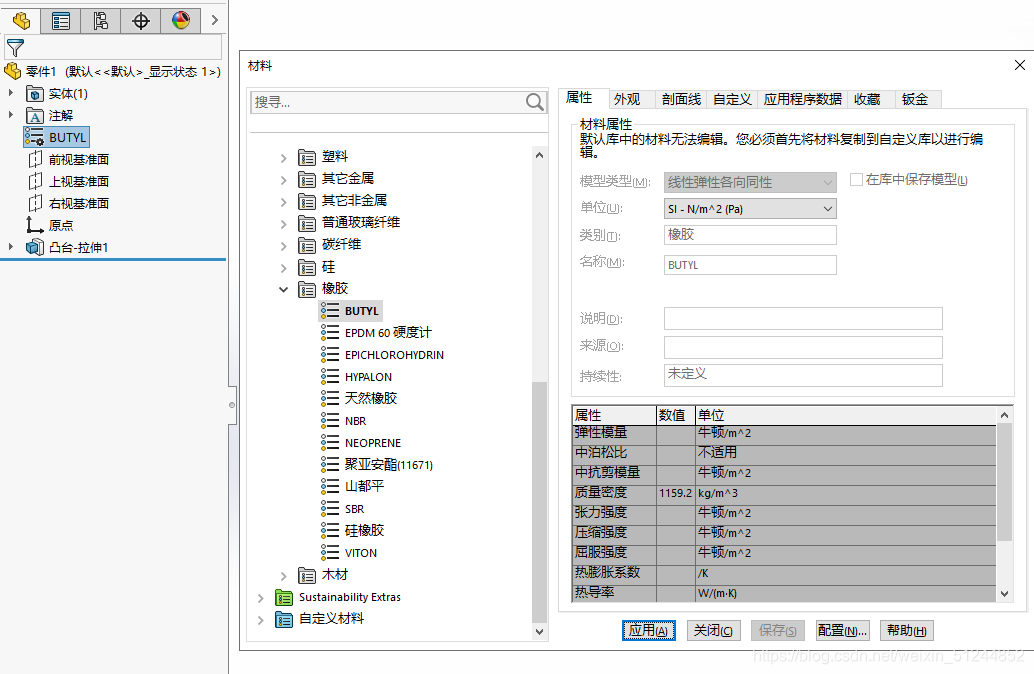
建模:使用SolidWorks创建我们的机器人模型。确保按照机器人的几何形状、连接关系和其他特征进行建模。确保模型的单位正确,并为模型的各个组成部分分配适当的材质和质量属性。
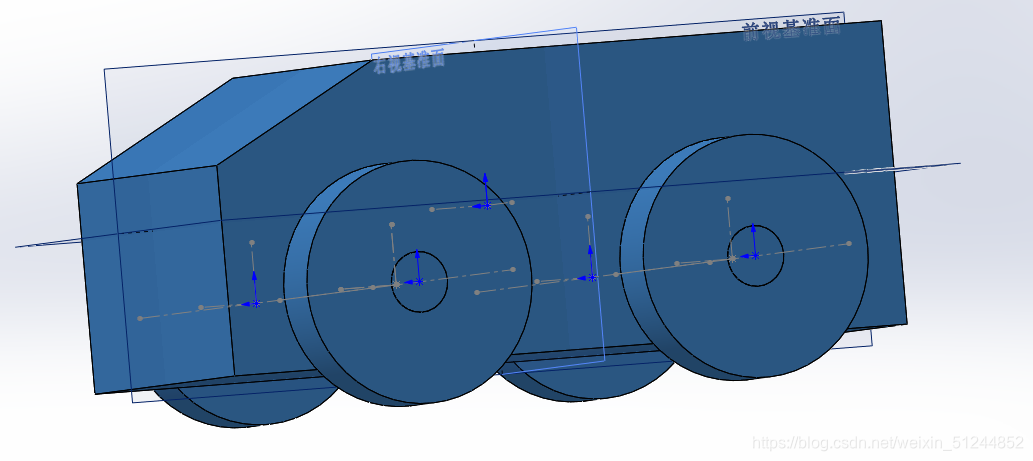
1.1 绘制零件并选择材料
1.2 装配零件
二、配置参数
2.1 添加坐标系和转轴
2.2 URDF Exportor的配置
三、保存为urdf文件
3.1 插件安装
下载**solidworks_urdf_exporter**插件。
单击打开后选择sw2urdfSetup.exe下载即可。
单击finish,下载完成。
3.2 导出
导出到STL文件:一旦您的模型构建完成,您需要将其导出为STL(Standard Tessellation Language)格式的文件。STL文件是一种常用的三维模型文件格式。在SolidWorks中,您可以通过选择“文件”>“另存为”>“STL”来导出模型。在导出过程中,您可能需要设置一些选项,如选择正确的单位、精度等。
3.3 显示
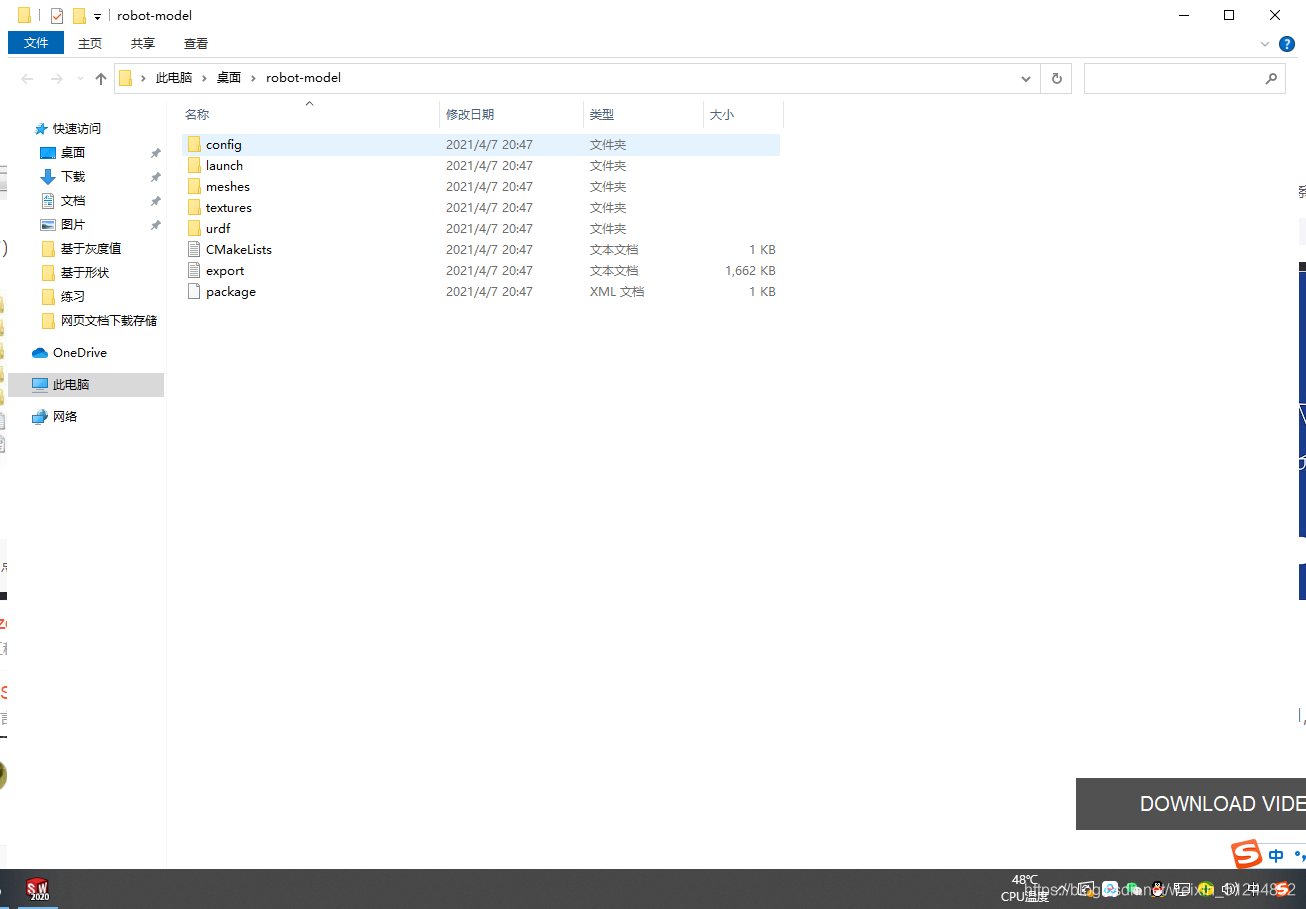
导出的文件相当于一个功能包,需要将其存放在一个工作空间(本博客以smartrobot为例)的src文件夹下,然后进行编译生成可执行文件。关于如何创建和编译工作空间以及功能包的方法参考博客:ROS学习笔记-创建工作空间和功能包,及过程中报错解决
打开终端,输入:
roslaunch robot-model display.launch
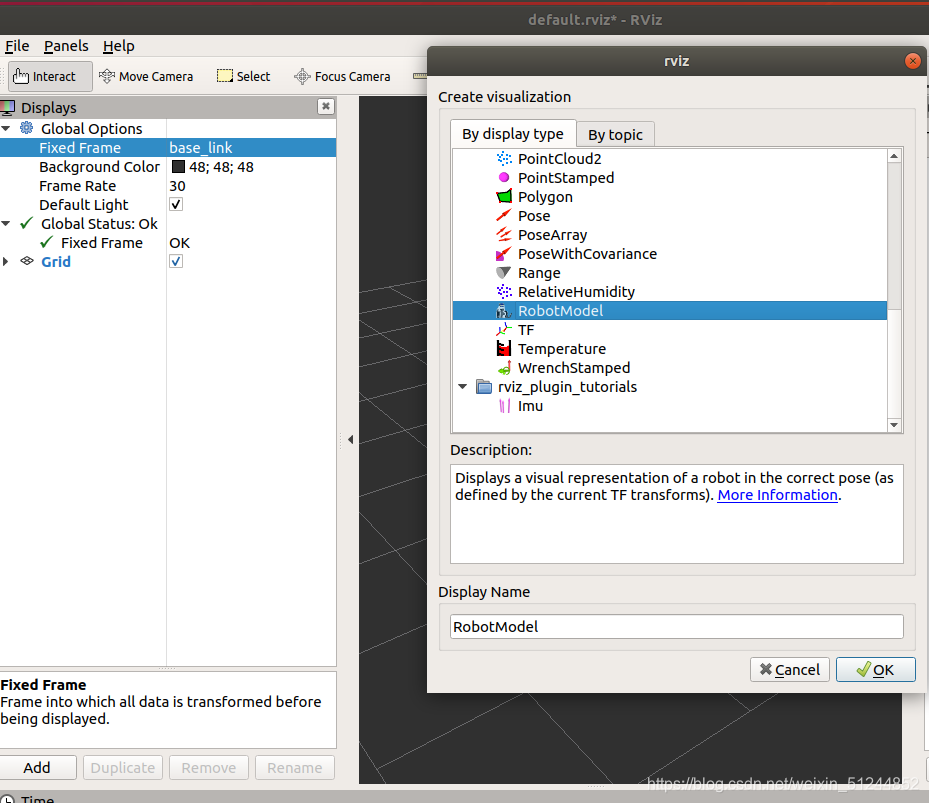
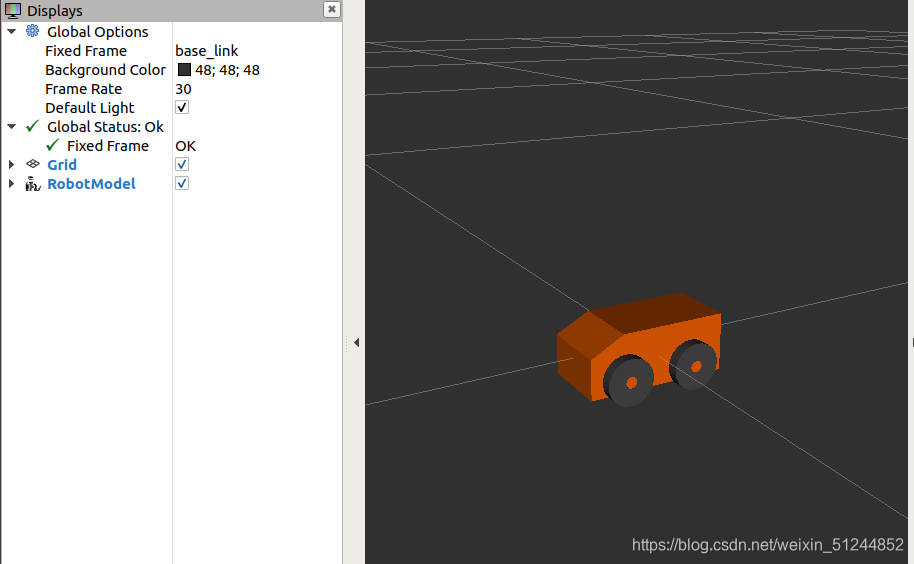
刚打开rviz时,由于固定参考系默认是map,所以不显示机器人模型,需要改成base_link,然后单击“Add,添加机器人模型。
这个过程中出现以下报错:
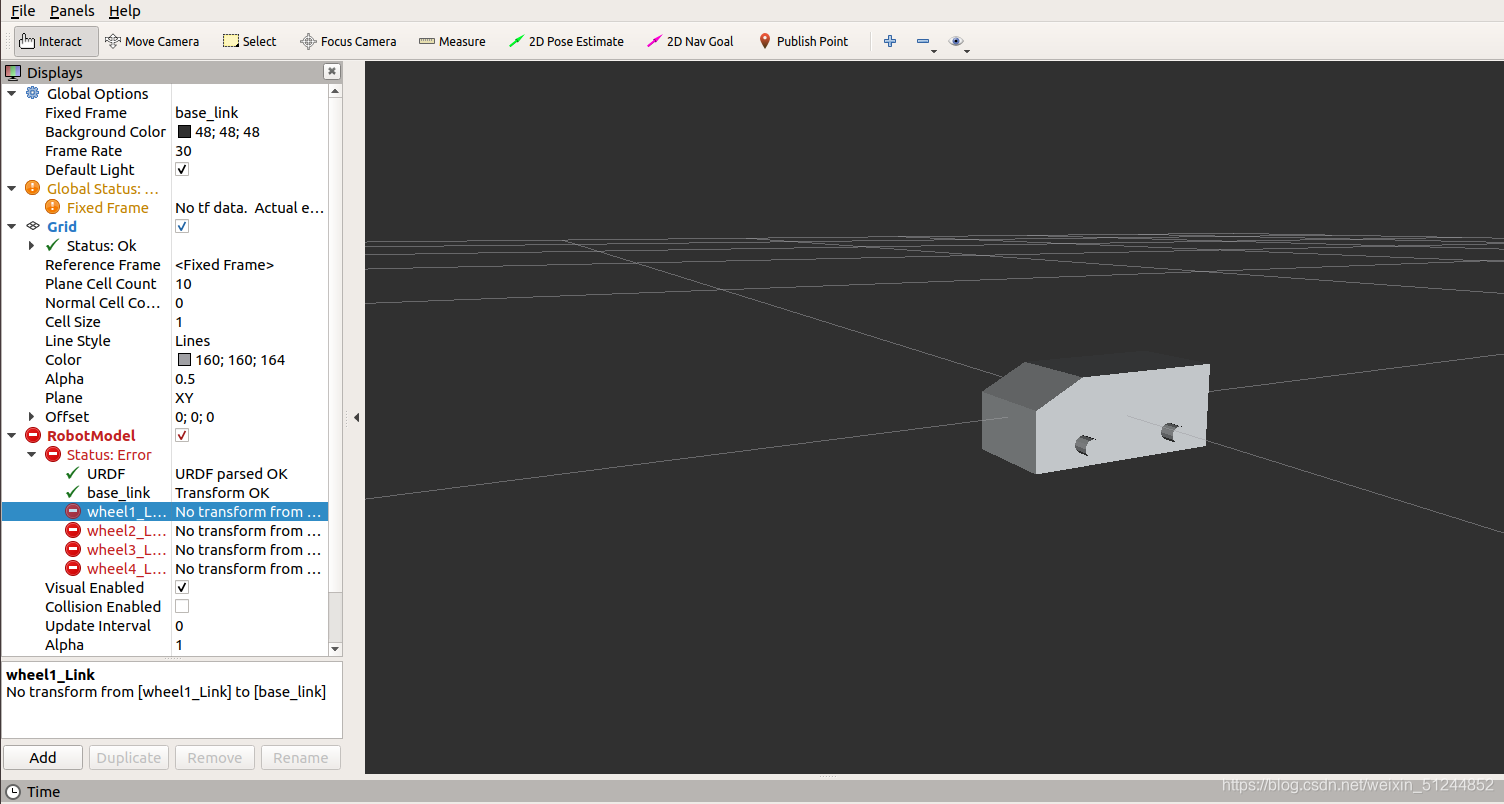
在rviz界面报错No transform from [link1] to [base_link]
在终端如下图报错:

原因:这是因为缺少 joint_ state_ publisher_ gui功能包
解决:输入如下命令,安装 joint_ state_ publisher_ gui功能包
sudo apt-get install ros-melodic-joint-state-publisher-gui
安装完后重新运行launch文件,机器人能完整显示并且会多出一个 joint_state_publisher 插件,可以控制四个转向轮的旋转。如图所示:
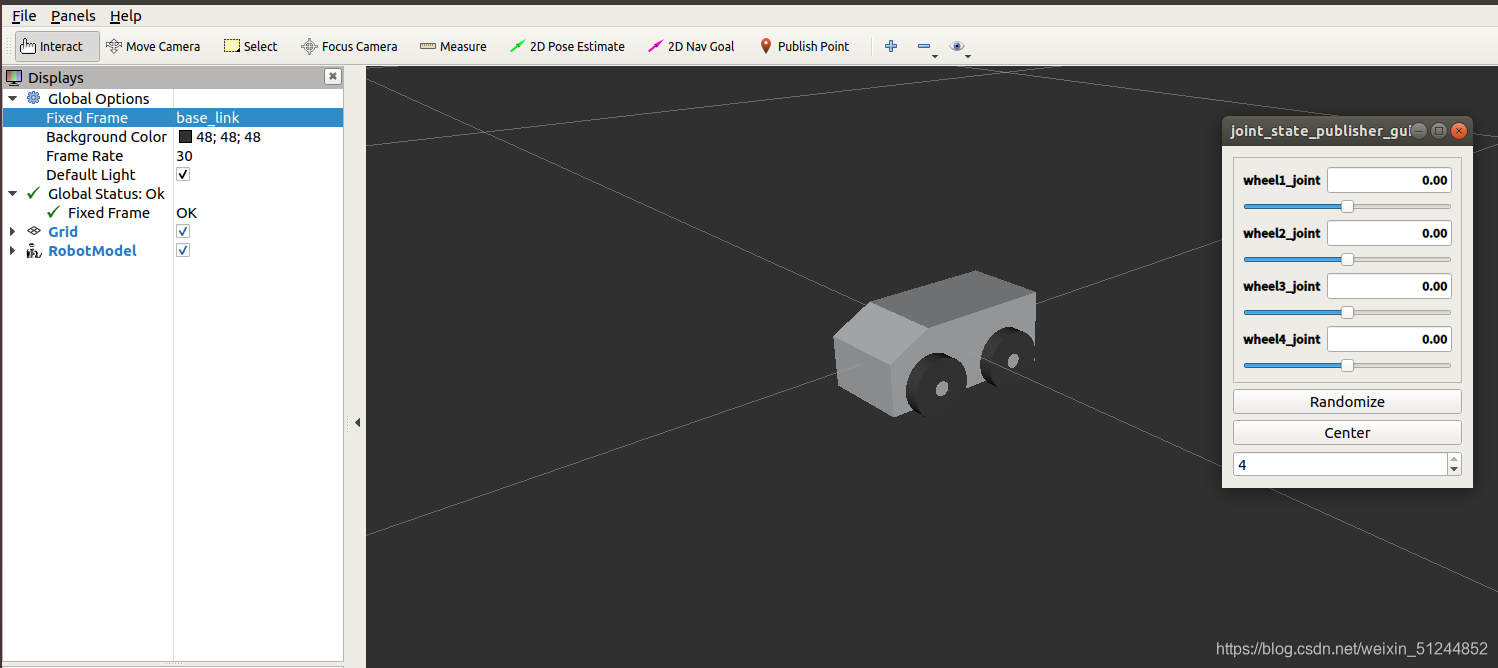
总结:经过以上的设置和改错,导入的机器人模型就能在rviz中完整显示了。
3.4 上色
打开urdf文件里面的robot-model.urdf文件,然后添加颜色名称和修改rgba值。
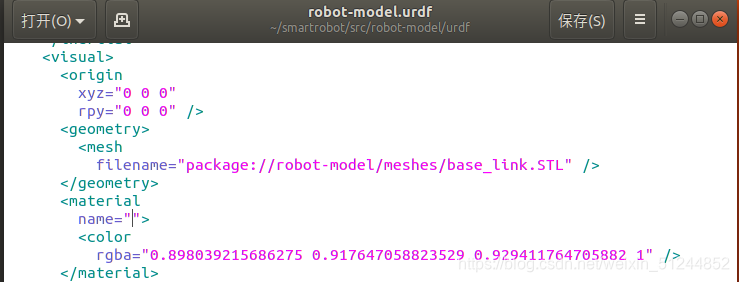
例如将车身改为黄色,代码改为:
name="yellow">在rviz显示黄色,说明设置成功。
references
ROS笔记之Gazebo机器人仿真(二)——Soildworks搭建机器人模型
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!