七自由度机器人基于肘部的位姿规划意义
对于七自由度机器人,可以以无穷多种轴角度组合到达目标姿态,每种构型的所有姿态对应的肘部点构成一个环
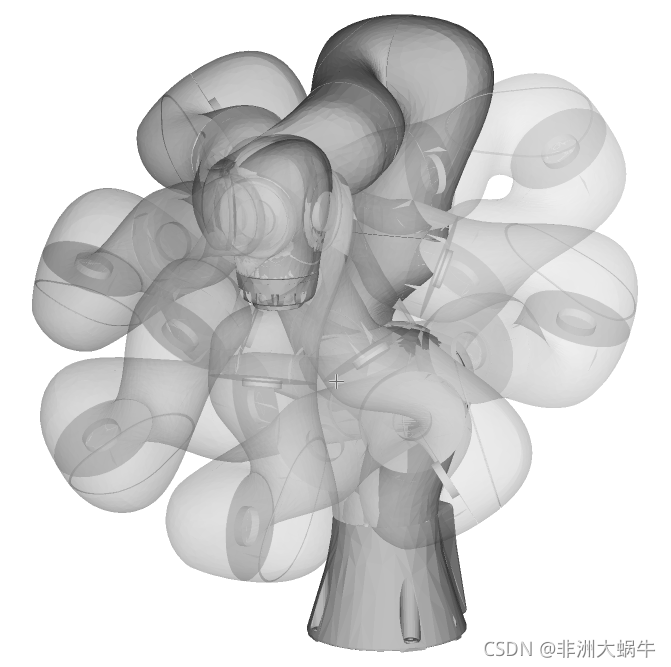
肘部规划可以控制机器人肘部的朝向,来保证机器人构型的可控性,可以规划本体的碰撞空间和规避大幅度的肘部运动
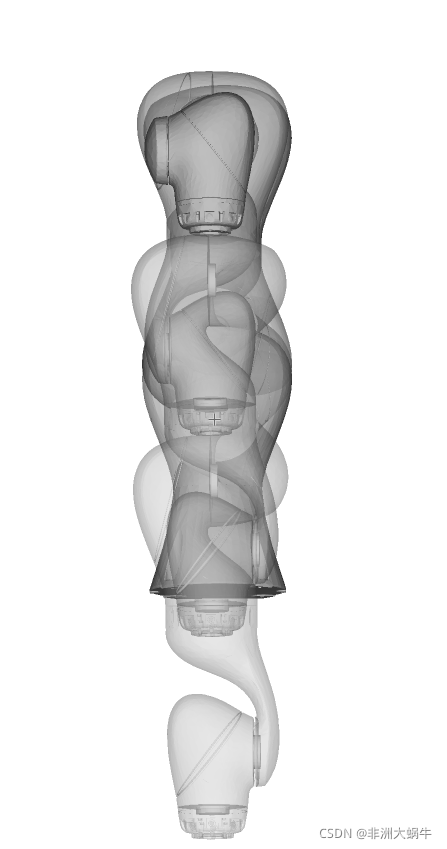
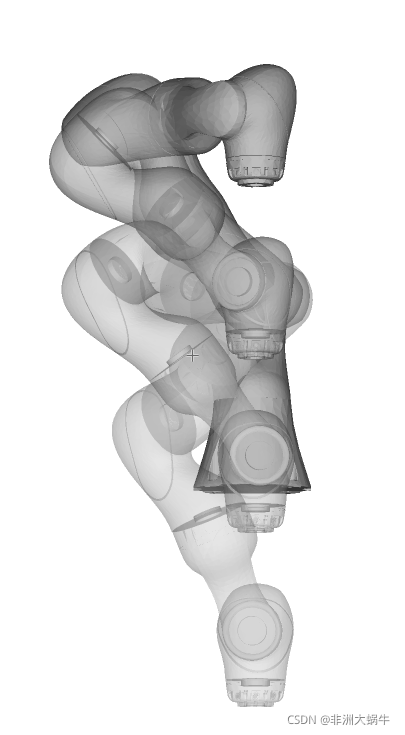
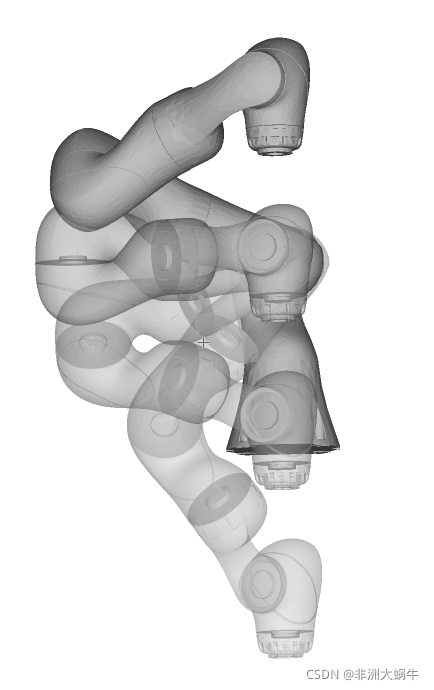
对于奇异点位置,六自由度机器人会有大幅度的肘部运动,这是构型自身的局限性,也就是经过奇异点时,在该点附近的微小运动会转化为大幅度的轴加速度,造成机器人无法实现该运动
七自由度机器人可以通过控制肘部的朝向,来回避大幅度的轴加速运动

本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!