KF-GINS源码阅读
原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
文章目录
- 一、KF-GINS 简介
- 1、程序概述
- 2、相关资料
- 3、文件结构
- 4、第三方库
- 二、编译、调试
- 三、类型定义
- 1、核心类:GIEngine
- 2、文件读写类型
- 3、配置选项类:GINSOptions
- 4、大地参数计算静态类:Earth
- 5、角度弧度转换静态类:Angle
- 四、程序执行流程
- 1、函数调用关系
- 2、重点函数
- 3、主函数
- 4、配置文件读取
- 5、数据文件读取
- 6、newImuProcess():松组合
- 六、Earth 类:地球参数和坐标转换
- 1、gravity():正常重力计算
- 2、meridianPrimeVerticalRadius():计算子午圈半径 RM、卯酉圈半径 RN
- 3、RN():计算卯酉圈主半径 RN
- 4、cne():n系(导航坐标系)到e系(地心地固坐标系)转换矩阵
- 5、qne():计算n系(北东地)到e系(ECEF)转换四元数
- 6、blh():从n系到e系转换四元数得到纬度和经度
- 7、blh2ecef():大地坐标(纬度、经度和高程)转地心地固坐标
- 7、ecef2blh():地心地固坐标转大地坐标
- 8、DRi():n系相对位置转大地坐标相对位置
- 9、DR():大地坐标相对位置转n系相对位置
- 10、local2global():局部坐标(在origin处展开)转大地坐标
- 11、global2local():大地坐标转局部坐标(在origin处展开)
- 12、iewe():地球自转角速度投影到e系
- 13、iewn():地球自转角速度投影到n系
- 14、enwn():n系相对于e系转动角速度投影到n系
- 七、捷联惯导更新:insPropagation()
- 1、insPropagation():捷联惯导递推
- 2、imuCompensate():IMU数据误差补偿
- 3、insMech():IMU 状态更新(机械编排)
- 4、velUpdate():速度更新
- 5、posUpdate():位置更新
- 6、attUpdate():姿态更新
- 7、噪声传播
- 八、GNSS 量测更新、系统状态反馈
- 1、gnssUpdate():GNSS 量测更新
- 2、EKFUpdate():EKF 更新协方差和误差状态
- 3、stateFeedback():状态反馈
- 九、KF-GINS常见问题
- KF-GINS能够达到怎么样的定位精度?
- 初始导航状态和初始导航状态标准差如何给定?
- IMU数据输入到程序之前,需要扣除重力加速度吗?
- INS机械编排中旋转效应等补偿项,对于低端IMU是否需要补偿?
- 组合导航中GNSS信号丢失期间进行纯惯导解算,这时IMU误差项可以补偿吗?
- IMU数据,如何从速率形式转到增量形式?
- IMU零偏和比例因子建模时相关时间如何给定?
- GNSS/INS组合导航中是否需要考虑惯性系和车体系的转换?
- 初始化拓展
- 观测信息拓展
- 状态信息拓展
一、KF-GINS 简介
1、程序概述
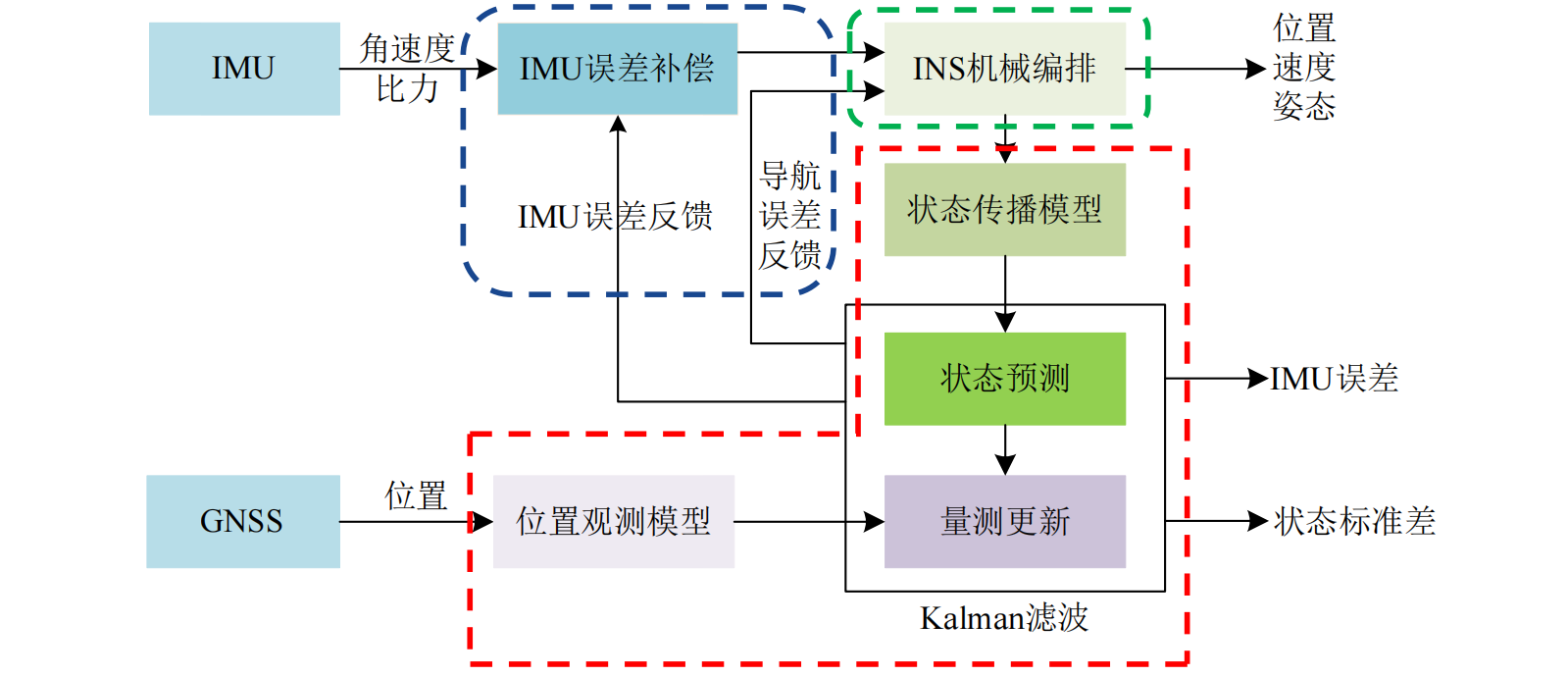
KF-GINS 是武大 i2Nav 实验室开源的一套松组合导航程序;可以读取 IMU 数据文件、GNSS 结果文件,进行松组合解算,计算位置、速度、姿态、陀螺仪零偏、加速度计零偏、陀螺仪比例、加速度计比力,共 21 维状态向量。代码量小,有详细的文档、注释和讲解,代码结构很好理解,有一些可以学习的工程技巧。
2、相关资料
- 项目开源地址:https://github.com/i2Nav-WHU
- i2NAV组合导航讲义、数据集:http://www.i2nav.cn/index/newList_zw?newskind_id=13a8654e060c40c69e5f3d4c13069078
- 介绍视频:https://www.bilibili.com/video/BV1Zs4y1B7m2/
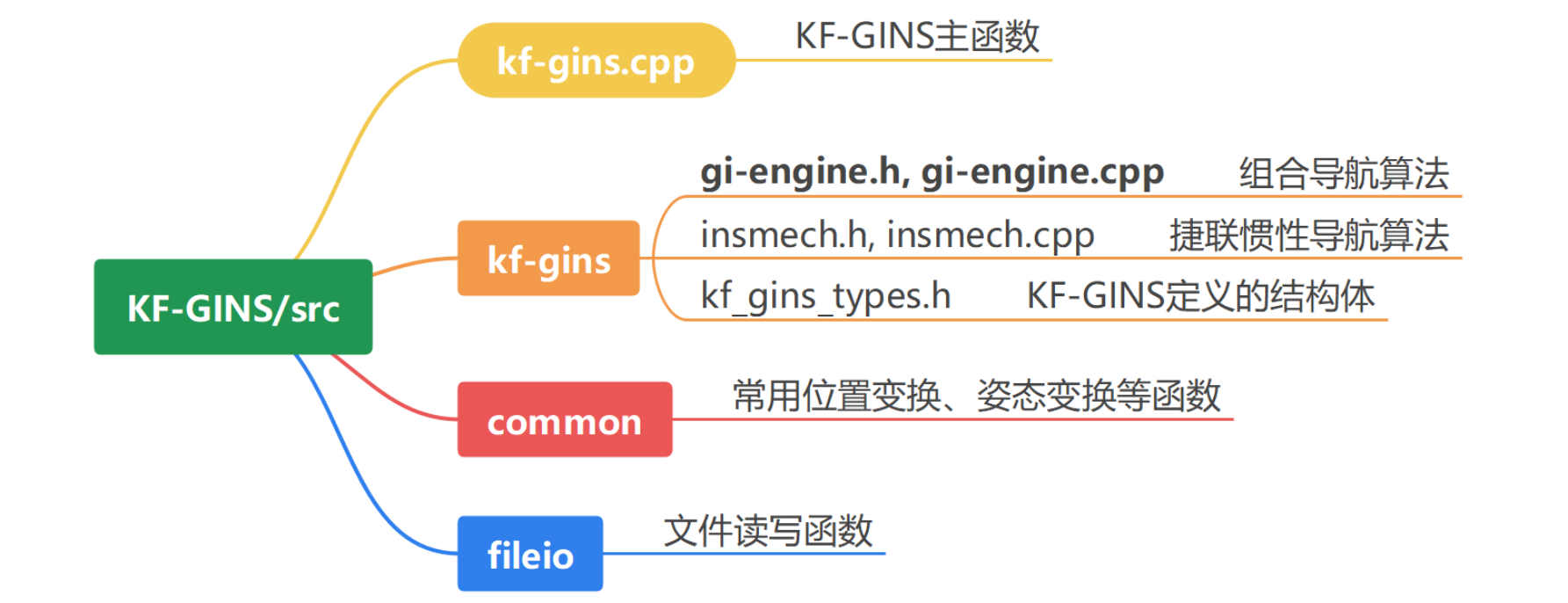
3、文件结构
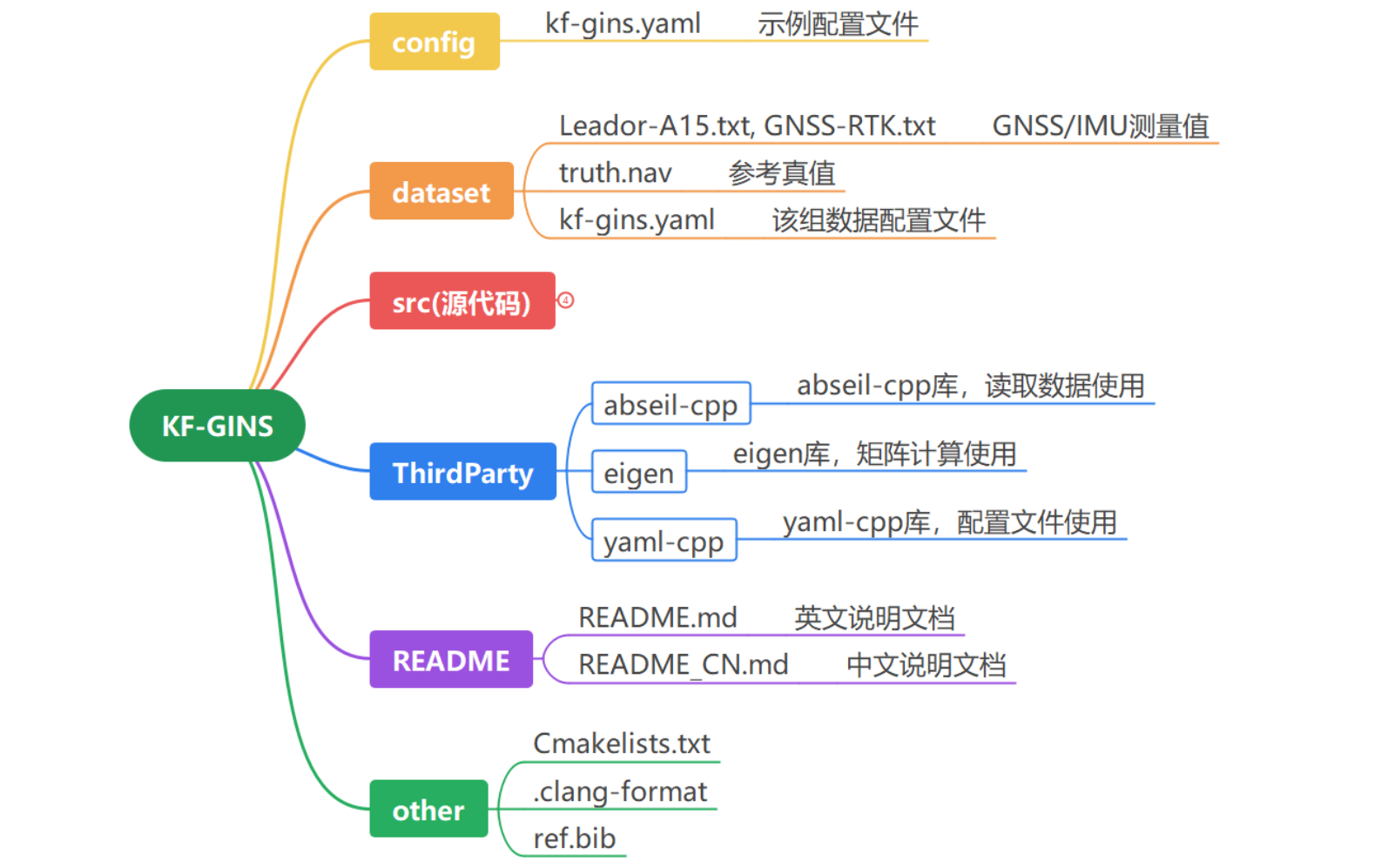
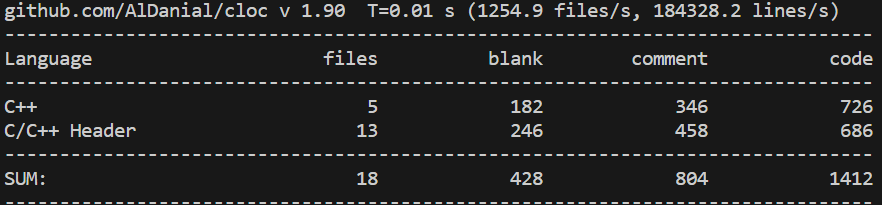
用 cloc 对 src 目录进行统计,结果如下。可以看出代码量很小,只有1412行,注释很详细,足有804行。
4、第三方库
- abseil-cpp:Google的开源C++库,提供了一系列实用的工具和功能,例如字符串处理、时间处理、错误处理、日志记录等。
- eigen:用于线性代数、矩阵和向量操作、数值计算和转换。
- yaml-cpp:YAML解析器和生成器库。
无需自己配置,作者把它们放到 ThirdParty 文件夹,并在 CMakeLists 文件中引入了:
# Eigen3
include_directories(ThirdParty/eigen-3.3.9)# yaml-cpp-0.7.0
add_subdirectory(ThirdParty/yaml-cpp-0.7.0)
target_link_libraries(${PROJECT_NAME} yaml-cpp)# abseil
set(ABSL_PROPAGATE_CXX_STD true)
add_subdirectory(ThirdParty/abseil-cpp-20220623.1)
target_link_libraries(${PROJECT_NAME}absl::stringsabsl::str_formatabsl::time)
二、编译、调试
基于 WSL + VScode 编译非常容易,用的几个库都直接放到 ThirdParty 文件夹,并在 CMakeLists 文件中引入了,不用我们再配置。如果已经配置好基础的 C++ 环境(cmake、gcc、gdb),把项目 clone 下来之后,选 KF-GINS 目录的 CMakeLists.txt 作为构建目标直接就能构建、编译成功,调试时能停在 main 函数开头设的断点。
launch.json 中作者已经设置命令行参数为配置文件路径,我们只要改好 config 路径下 kf-gins.yaml 配置文件中的 几个文件路径(imupath、gnsspath、outputpath)和解算时间(starttime、endtime),就可以跑通示例数据了。
三、类型定义
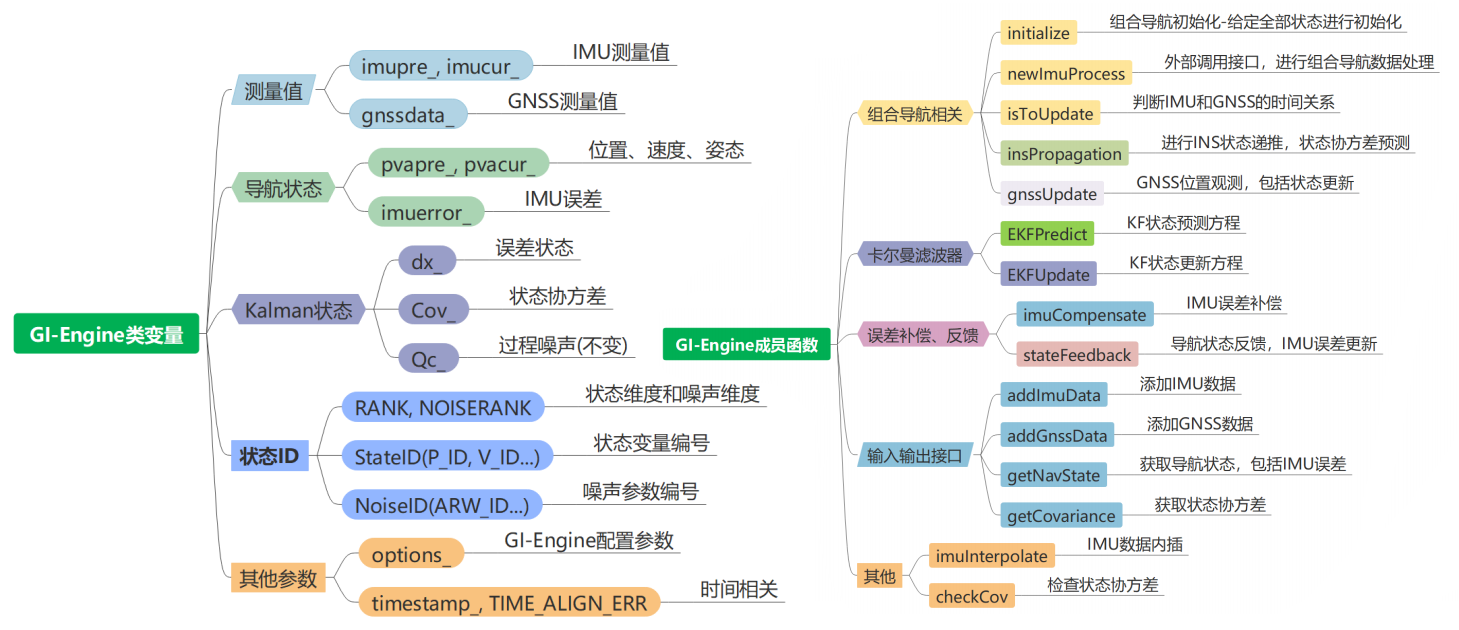
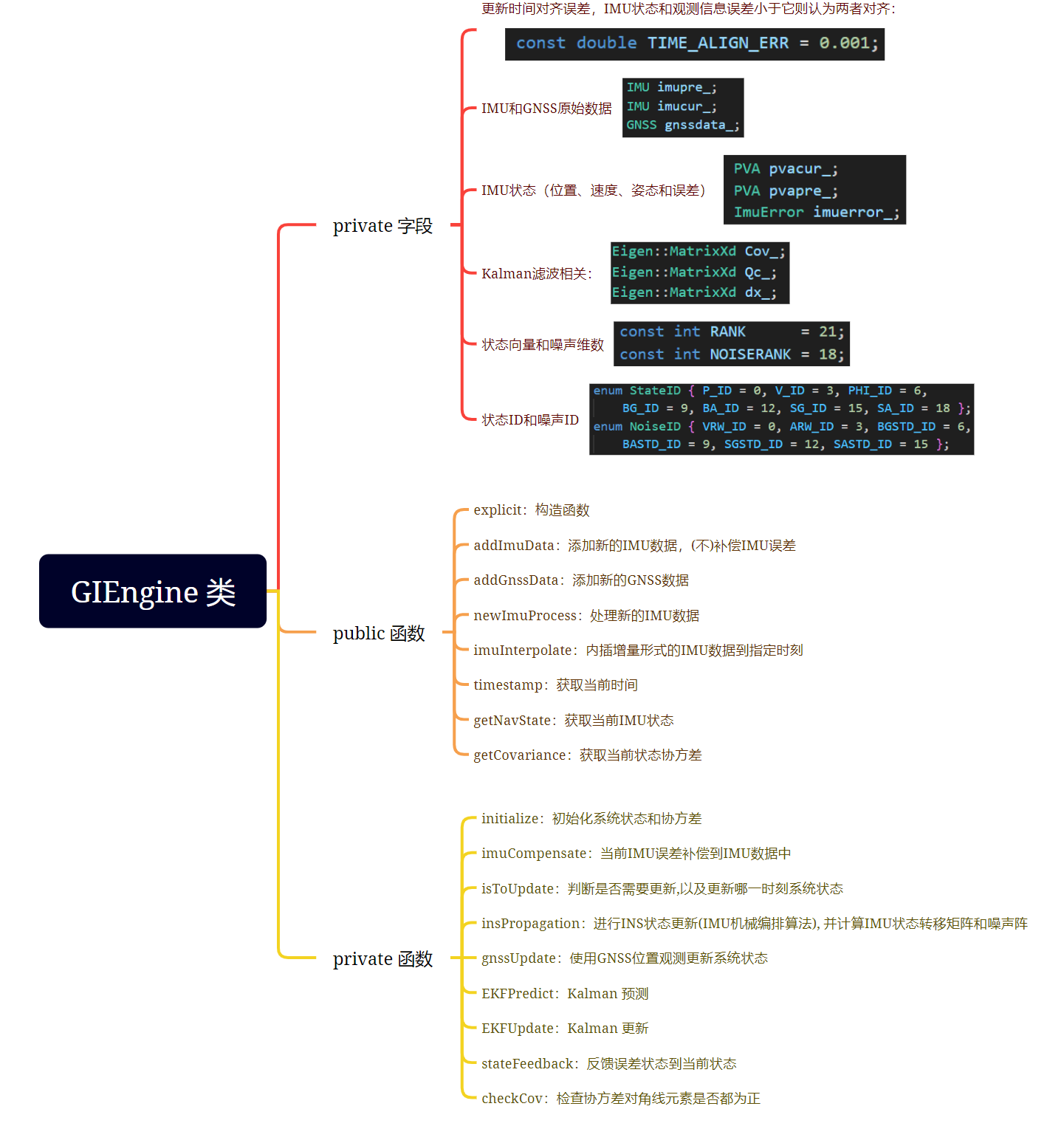
1、核心类:GIEngine
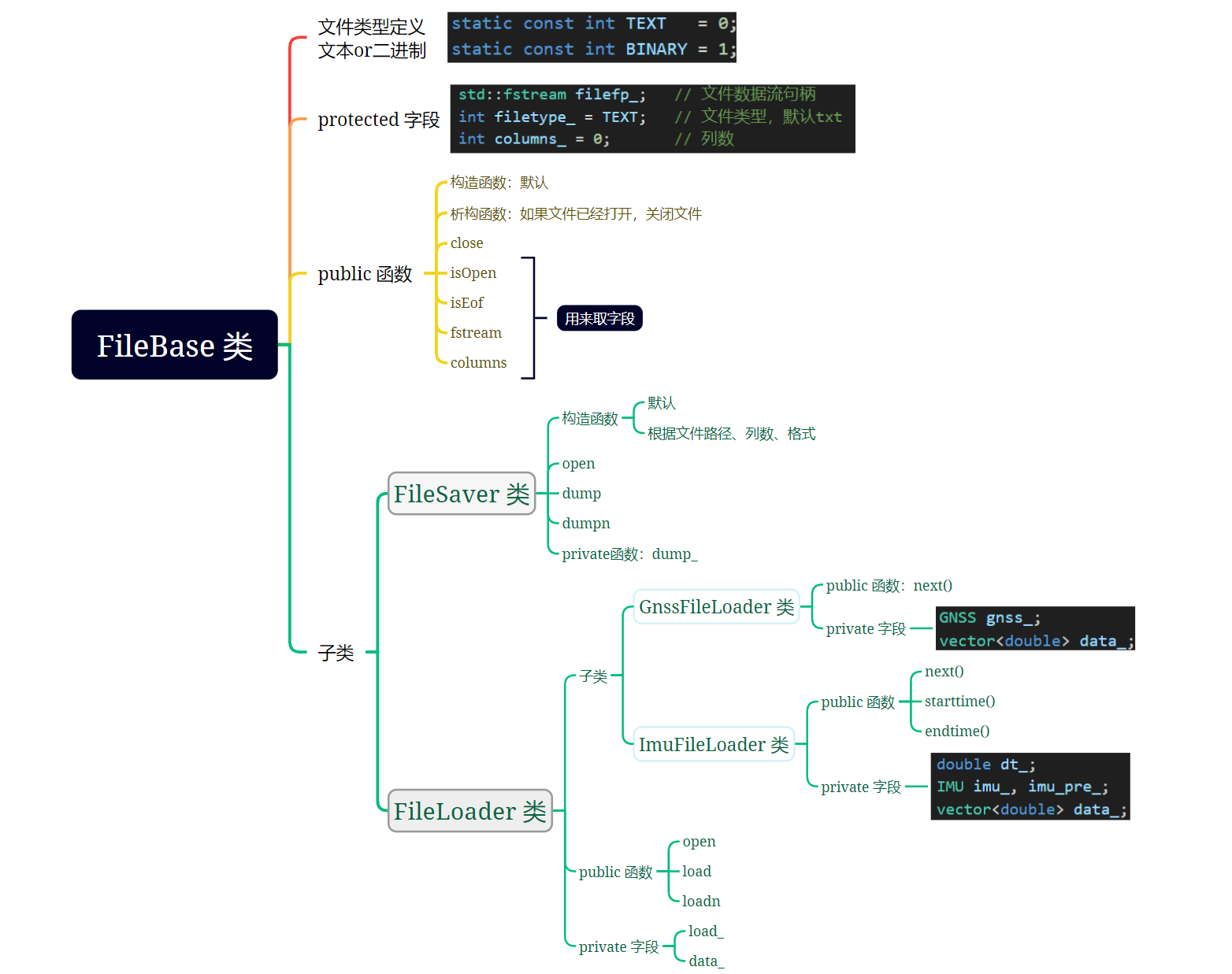
2、文件读写类型
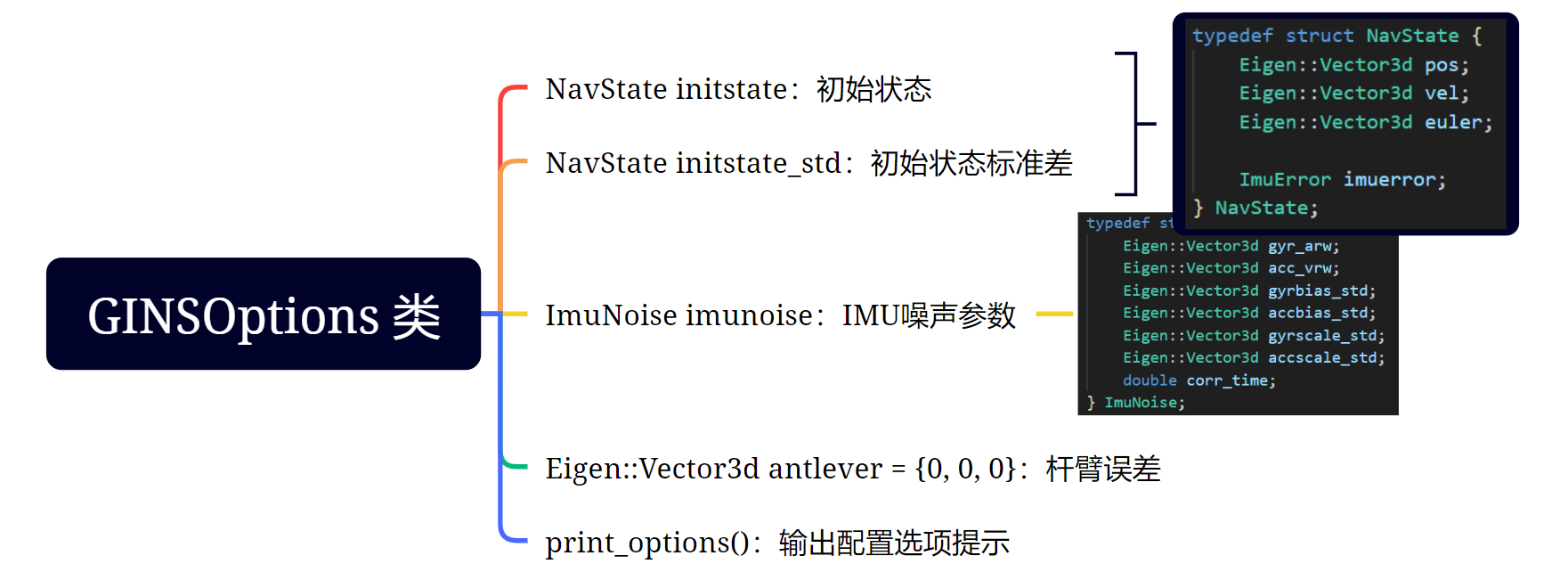
3、配置选项类:GINSOptions
4、大地参数计算静态类:Earth
5、角度弧度转换静态类:Angle

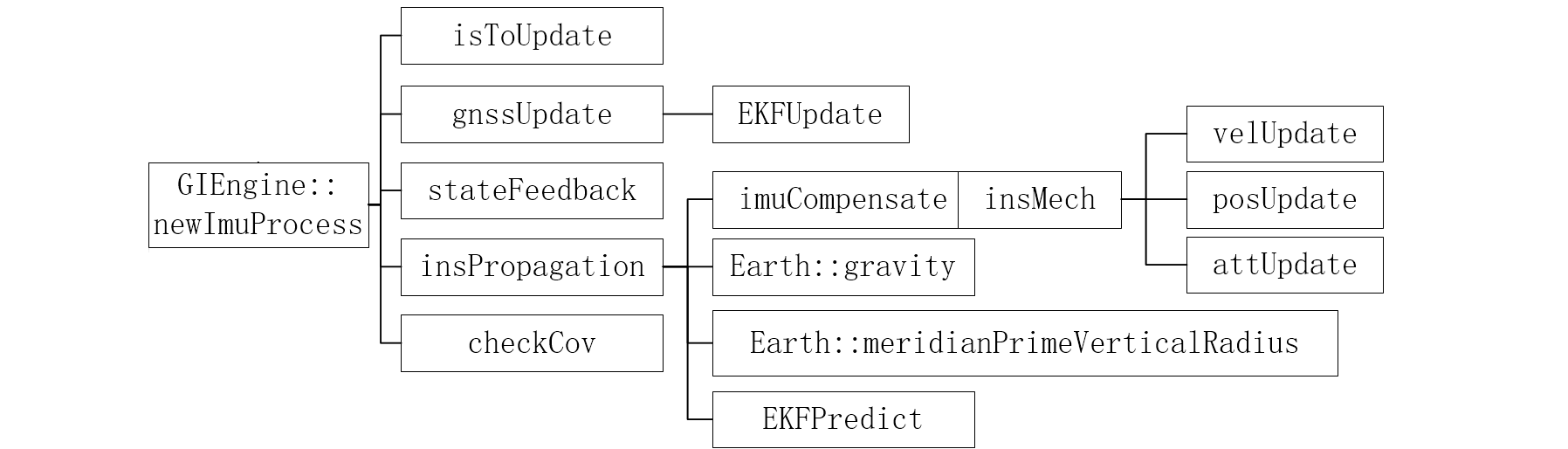
四、程序执行流程
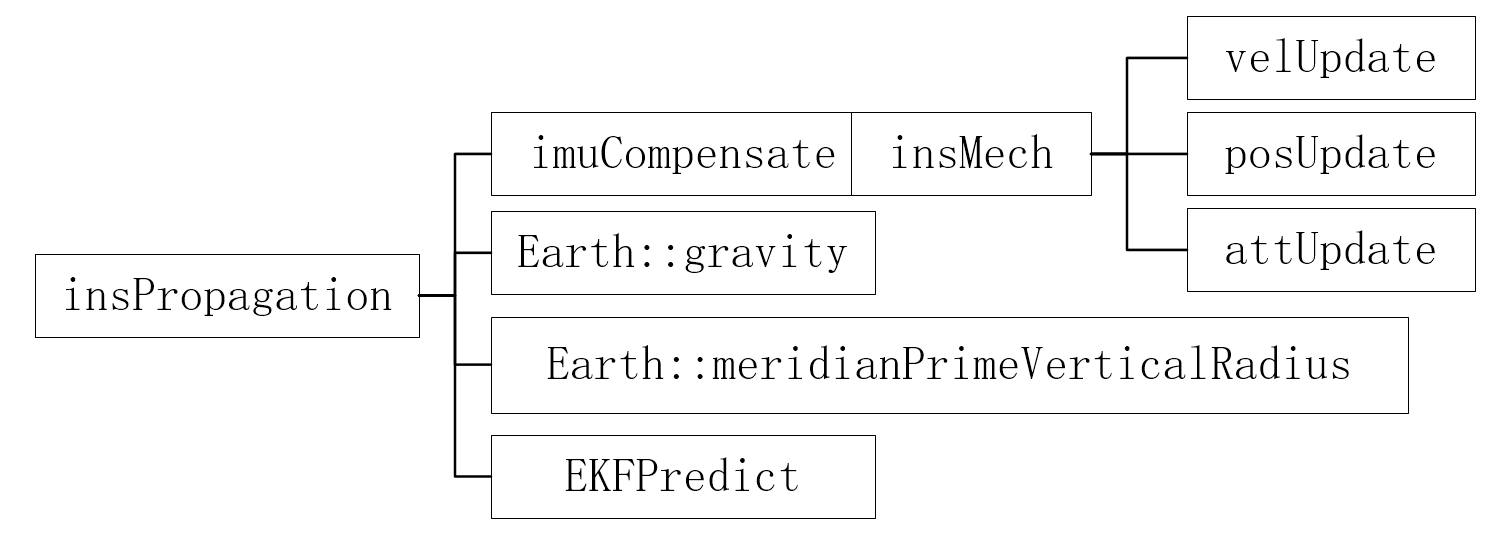
1、函数调用关系
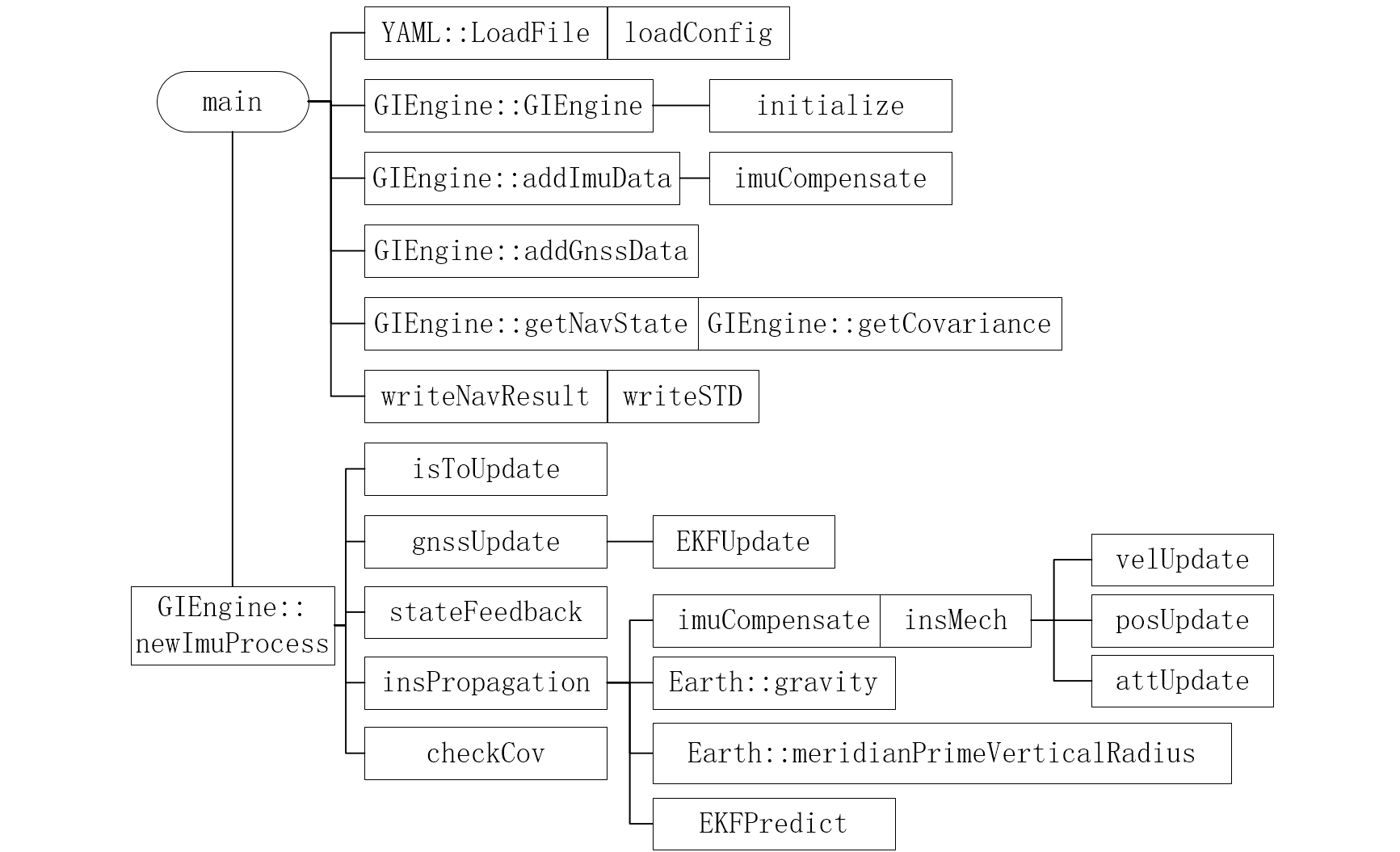
2、重点函数
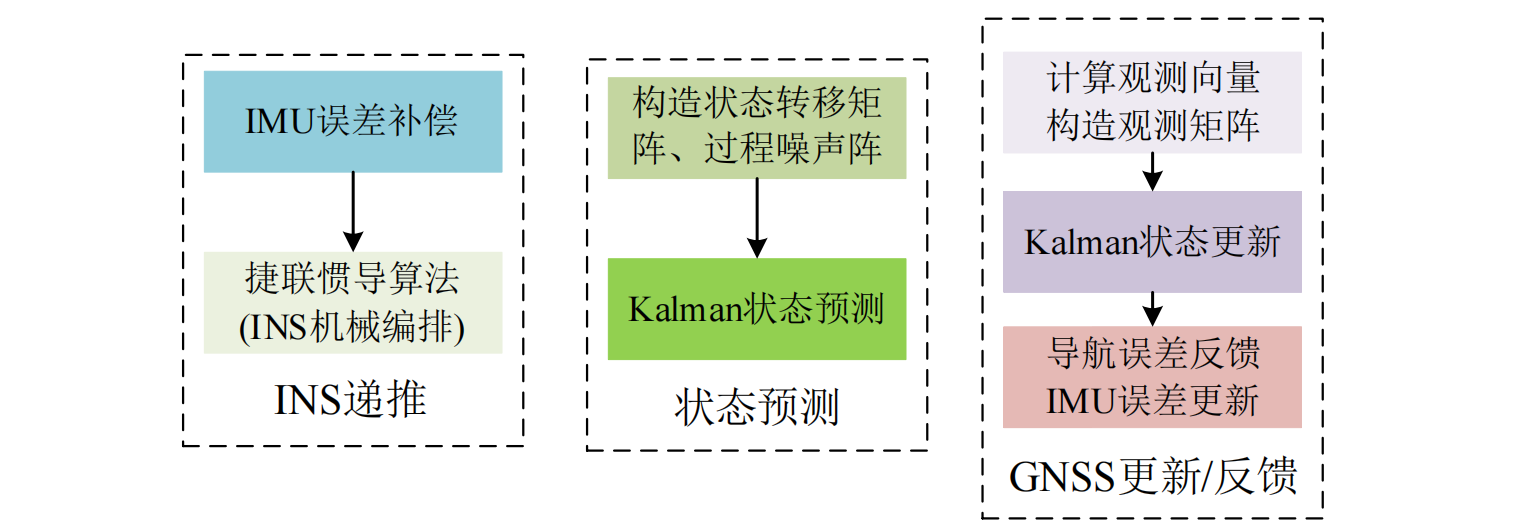
newImuProcess()是松组合的核心函数。isToUpdate()中根据当前 IMU 和 GNSS 时间戳关系,判断要不要进行 GNSS 量测更新。imuCompensate()中进行 IMU 校正,即减去零偏、除以比例。insPropagation()中实现捷联惯导 PVA 和噪声递推、构建 F 矩阵。insMech()中 IMU 机械编排,依次进行速度更新、位置更新、姿态更新。gnssUpdate()中进行 GNSS 量测更新,实现杆臂补偿。stateFeedback()GNSS 量测更新后,状态向量误差反馈。
3、主函数
首先判断命令行参数,如果不为 2(可执行程序名算第一个参数 argv[0])即没传入配置文件路径,输出提示并退出程序:
if (argc != 2) {std::cout << "usage: KF-GINS kf-gins.yaml" << std::endl;return -1;
}
创建 t1、t2、t3 用于计时:
long t1,t2,t3; // 用于计时
t1=clock();
std::cout << std::endl << "KF-GINS: An EKF-Based GNSS/INS Integrated Navigation System" << std::endl << std::endl;
auto ts = absl::Now();
读取配置文件:
// 加载配置文件
// load configuration file
YAML::Node config;
try {config = YAML::LoadFile(argv[1]);
} catch (YAML::Exception &exception) {std::cout << "Failed to read configuration file. Please check the path and format of the configuration file!"<< std::endl;return -1;
}// 读取配置参数到GINSOptioins中,并构造GIEngine
// load configuration parameters to GINSOptioins
GINSOptions options;
if (!loadConfig(config, options)) {std::cout << "Error occurs in the configuration file!" << std::endl;return -1;
}// 读取文件路径配置
// load filepath configuration
std::string imupath, gnsspath, outputpath;
try {imupath = config["imupath"].as<std::string>();gnsspath = config["gnsspath"].as<std::string>();outputpath = config["outputpath"].as<std::string>();
} catch (YAML::Exception &exception) {std::cout << "Failed when loading configuration. Please check the file path and output path!" << std::endl;return -1;
}// imu数据配置,数据处理区间
// imudata configuration, data processing interval
int imudatalen, imudatarate;
double starttime, endtime;
try {imudatalen = config["imudatalen"].as<int>();imudatarate = config["imudatarate"].as<int>();starttime = config["starttime"].as<double>();endtime = config["endtime"].as<double>();
} catch (YAML::Exception &exception) {std::cout << "Failed when loading configuration. Please check the data length, data rate, and the process time!"<< std::endl;return -1;
}
根据读进来的配置,构造解算用到的几个对象:
- 文件读取对象:
gnssfile、imufile - 松组合解算核心类:
giengine - 构造输出文件对象:
navfile、imuerrfile、stdfile
// 加载 GNSS 文件和 IMU 文件
// load GNSS file and IMU file
GnssFileLoader gnssfile(gnsspath);
ImuFileLoader imufile(imupath, imudatalen, imudatarate);t2 =clock();// 构造GIEngine
// Construct GIEngine
GIEngine giengine(options);// 构造输出文件
// construct output file
// navfile: gnssweek(1) + time(1) + pos(3) + vel(3) + euler angle(3) = 11
// imuerrfile: time(1) + gyrbias(3) + accbias(3) + gyrscale(3) + accscale(3) = 13
// stdfile: time(1) + pva_std(9) + imubias_std(6) + imuscale_std(6) = 22
int nav_columns = 11, imuerr_columns = 13, std_columns = 22;
FileSaver navfile(outputpath + "/KF_GINS_Navresult.nav", nav_columns, FileSaver::TEXT);
FileSaver imuerrfile(outputpath + "/KF_GINS_IMU_ERR.txt", imuerr_columns, FileSaver::TEXT);
FileSaver stdfile(outputpath + "/KF_GINS_STD.txt", std_columns, FileSaver::TEXT);// 检查文件是否正确打开
// check if these files are all opened
if (!gnssfile.isOpen() || !imufile.isOpen() || !navfile.isOpen() || !imuerrfile.isOpen() || !stdfile.isOpen()) {std::cout << "Failed to open data file!" << std::endl;return -1;
}
检查处理起止时间是否合理:
if (endtime < 0) {endtime = imufile.endtime();
}
if (endtime > 604800 || starttime < imufile.starttime() || starttime > endtime) {std::cout << "Process time ERROR!" << std::endl;return -1;
}
循环调用 imufile.next()、gnssfile.next() 读取 IMU、GNSS 数据,直到时间戳在解算时间范围内。循环结束后 imu_cur、gnss 分别存解算时间内第一个IMU、GNSS量测,且文件指针指向的位置也到达解算时间内数据的开头:
IMU imu_cur;
do {imu_cur = imufile.next();
} while (imu_cur.time < starttime);GNSS gnss;
do {gnss = gnssfile.next();
} while (gnss.time <= starttime);
调用 addImuData()、addGnssData() 将刚刚读取到解算时间范围内第一个 IMU、GNSS 数据加入 giengine,并对 IMU 数据进行误差补偿,减去零偏、除以加上单位阵后的比例:
// 添加IMU数据到GIEngine中,补偿IMU误差
// add imudata to GIEngine and compensate IMU error
giengine.addImuData(imu_cur, true);// 添加GNSS数据到GIEngine
// add gnssdata to GIEngine
giengine.addGnssData(gnss);
定义变量,用于保存处理结果、显示处理进度:
// 用于保存处理结果
// used to save processing results
double timestamp;
NavState navstate;
Eigen::MatrixXd cov;// 用于显示处理进程
// used to display processing progress
int percent = 0, lastpercent = 0;
double interval = endtime - starttime;
接下来是一个大 while 死循环,每次循环都会读取一个 IMU 数据,只有当前 IMU 状态时间新于 GNSS 时间时,才会读取 GNSS 数据:
// 当前IMU状态时间新于GNSS时间时,读取并添加新的GNSS数据到GIEngine
// load new gnssdata when current state time is newer than GNSS time and add it to GIEngine
if (gnss.time < imu_cur.time && !gnssfile.isEof()) {gnss = gnssfile.next();giengine.addGnssData(gnss);
}// 读取并添加新的IMU数据到GIEngine
// load new imudata and add it to GIEngine
imu_cur = imufile.next();
if (imu_cur.time > endtime || imufile.isEof()) {break;
}
giengine.addImuData(imu_cur);
调用 newImuProcess() 根据当前 IMU、GNSS 数据进行解算,下面会重点介绍:
giengine.newImuProcess();
解算之后,获取当前时间,IMU状态和协方差、保存并输出处理结果,输出结果的时间戳与 IMU 时间戳一致:
// 获取当前时间,IMU状态和协方差
// get current timestamp, navigation state and covariance
timestamp = giengine.timestamp();
navstate = giengine.getNavState();
cov = giengine.getCovariance();// 保存处理结果
// save processing results
writeNavResult(timestamp, navstate, navfile, imuerrfile);
writeSTD(timestamp, cov, stdfile);
显示处理进度:
percent = int((imu_cur.time - starttime) / interval * 100);if (percent - lastpercent >= 1) {std::cout << " - Processing: " << std::setw(3) << percent << "%\r" << std::flush;lastpercent = percent;
}
循环处理完成之后,关闭打开的文件、输出结束信息、return 0 退出程序:
// 关闭打开的文件
// close opened file
imufile.close();
gnssfile.close();
navfile.close();
imuerrfile.close();
stdfile.close();// 处理完毕
// process finish
auto te = absl::Now();
std::cout << std::endl << std::endl << "KF-GINS Process Finish! ";
std::cout << "From " << starttime << " s to " << endtime << " s, total " << interval << " s!" << std::endl;
std::cout << "Cost " << absl::ToDoubleSeconds(te - ts) << " s in total" << std::endl;return 0;
4、配置文件读取
KF-GINS 使用 YMAL 格式的配置文件,通过配置文件可以设置数据文件路径、处理时间段、初始PVA、初始比例零偏、杆臂等。KF-GINS 的配置都是键值对形式的: 键 :值,设置的时候改后面的值即可。程序执行的时候要把配置文件路径作为命令行参数。下面简单介绍读取流程:
在主函数中先调用 yaml-cpp 的接口 YAML::LoadFile() 通过 YMAL 配置文件路径,将配置导入为 YMAL 节点 config:
YAML::Node config;
try {config = YAML::LoadFile(argv[1]);
} catch (YAML::Exception &exception) {std::cout << "Failed to read configuration file. Please check the path and format of the configuration file!"<< std::endl;return -1;
}
然后调用 loadConfig() 从 YMAL 根节点 config 读取配置参数到 GINSOptions 类型对象 options 中:
GINSOptions options;
if (!loadConfig(config, options)) {std::cout << "Error occurs in the configuration file!" << std::endl;return -1;
}
需要注意 loadConfig() 并没有把所有配置信息都读进来,它读取的只是取初始位置、IMU零偏、比例和对应的标准差;大部分参数都是三维的,读取的时候先存成 vector 然后进行量纲、单位转换,再存到 options 对应的 vector3d 类型字段中。以初始 PVA 为例:
// 读取初始位置(纬度 经度 高程)、(北向速度 东向速度 垂向速度)、姿态(欧拉角,ZYX旋转顺序, 横滚角、俯仰角、航向角)
// load initial position(latitude longitude altitude)
// velocity(speeds in the directions of north, east and down)
// attitude(euler angle, ZYX, roll, pitch and yaw)
std::vector<double> vec1, vec2, vec3, vec4, vec5, vec6;
try {vec1 = config["initpos"].as<std::vector<double>>();vec2 = config["initvel"].as<std::vector<double>>();vec3 = config["initatt"].as<std::vector<double>>();
} catch (YAML::Exception &exception) {std::cout << "Failed when loading configuration. Please check initial position, velocity, and attitude!"<< std::endl;return false;
}
for (int i = 0; i < 3; i++) { // 单位转换options.initstate.pos[i] = vec1[i] * D2R;options.initstate.vel[i] = vec2[i];options.initstate.euler[i] = vec3[i] * D2R;
}
options.initstate.pos[2] *= R2D; // 高程不用转
文件路径和 IMU 处理配置是在主函数中读取:
// 读取文件路径配置
// load filepath configuration
std::string imupath, gnsspath, outputpath;
try {imupath = config["imupath"].as<std::string>();gnsspath = config["gnsspath"].as<std::string>();outputpath = config["outputpath"].as<std::string>();
} catch (YAML::Exception &exception) {std::cout << "Failed when loading configuration. Please check the file path and output path!" << std::endl;return -1;
}// imu数据配置,数据处理区间
// imudata configuration, data processing interval
int imudatalen, imudatarate;
double starttime, endtime;
try {imudatalen = config["imudatalen"].as<int>();imudatarate = config["imudatarate"].as<int>();starttime = config["starttime"].as<double>();endtime = config["endtime"].as<double>();
} catch (YAML::Exception &exception) {std::cout << "Failed when loading configuration. Please check the data length, data rate, and the process time!"<< std::endl;return -1;
}
5、数据文件读取
KF-GINS 中没有一次性把整个文件都读进来;而是先打开文件,获取文件描述符;然后计算一点,读一点,模仿实时解算。
在主函数中先构造 GnssFileLoader、ImuFileLoader 类的对象 gnssfile、imufile:
GnssFileLoader gnssfile(gnsspath);
ImuFileLoader imufile(imupath, imudatalen, imudatarate);
构造函数中调用 open() 函数,将文件打开,获得文件指针,并记录下文件列数和 IMU 采样间隔。
explicit GnssFileLoader(const string &filename, int columns = 7) {open(filename, columns, FileLoader::TEXT);
}
ImuFileLoader(const string &filename, int columns, int rate = 200) {open(filename, columns, FileLoader::TEXT);dt_ = 1.0 / (double) rate;imu_.time = 0;
}
bool FileLoader::open(const string &filename, int columns, int filetype) {auto type = filetype == TEXT ? std::ios_base::in : (std::ios_base::in | std::ios_base::binary);filefp_.open(filename, type);columns_ = columns;filetype_ = filetype;return isOpen();
}
调用 imufile.next()、gnssfile.next(),读取一个数据。
在主文件中,先循环调用 imufile.next()、gnssfile.next() 读取 IMU、GNSS 数据,直到时间戳在解算时间范围内。循环结束后 imu_cur、gnss 分别存解算时间内第一个 IMU、GNSS 量测,且文件指针指向的位置也到达解算时间内数据的开头:
IMU imu_cur;
do {imu_cur = imufile.next();
} while (imu_cur.time < starttime);GNSS gnss;
do {gnss = gnssfile.next();
} while (gnss.time <= starttime);
之后每次循环解算,都会读取一个 IMU 数据,只有当前 IMU 状态时间新于 GNSS 时间时,才会读取 GNSS 数据:
while (true) {// 当前IMU状态时间新于GNSS时间时,读取并添加新的GNSS数据到GIEngine// load new gnssdata when current state time is newer than GNSS time and add it to GIEngineif (gnss.time < imu_cur.time && !gnssfile.isEof()) {gnss = gnssfile.next();giengine.addGnssData(gnss);}// 读取并添加新的IMU数据到GIEngine// load new imudata and add it to GIEngineimu_cur = imufile.next();if (imu_cur.time > endtime || imufile.isEof()) {break;}
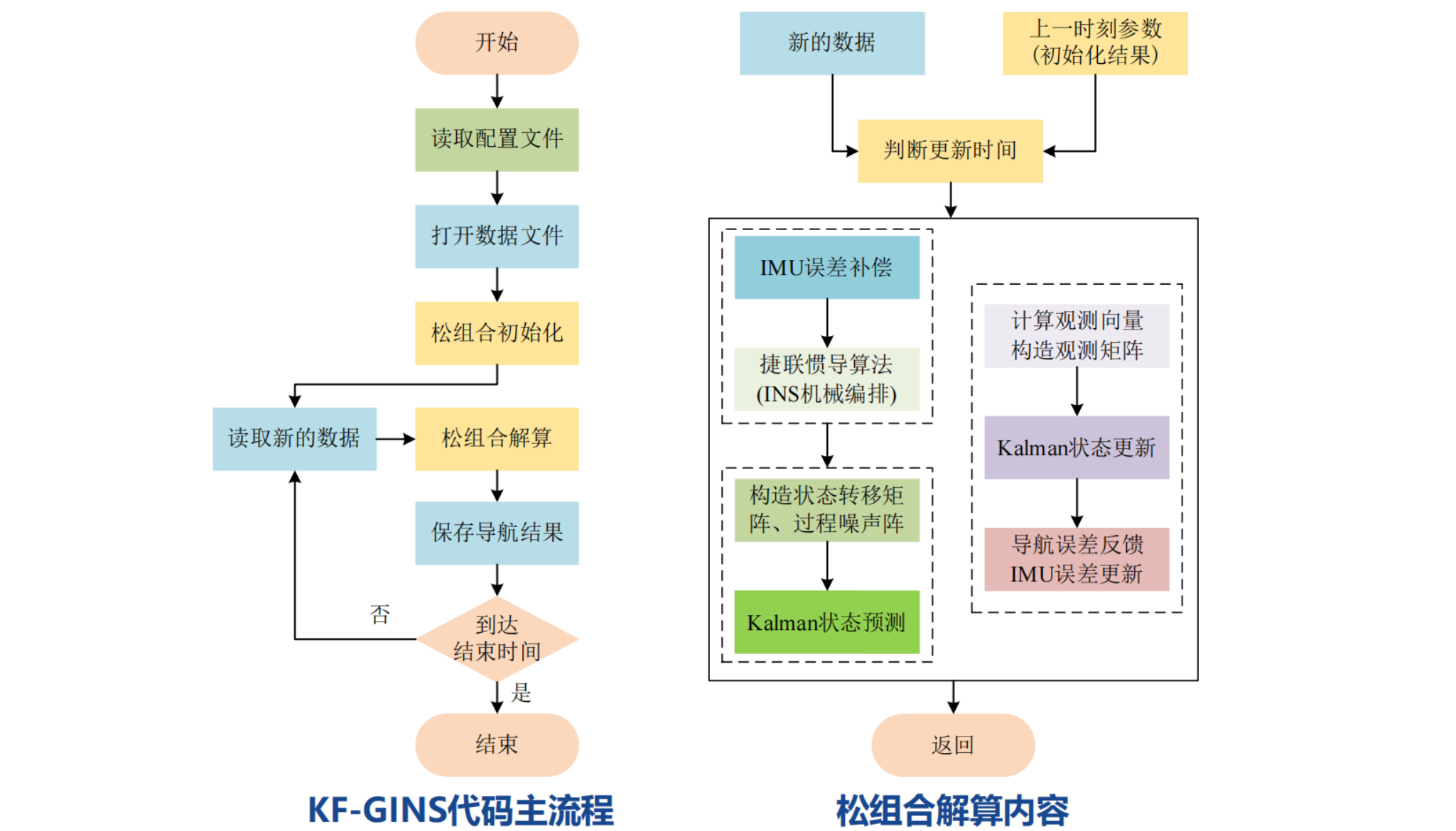
6、newImuProcess():松组合
这个函数是松组合解算的入口,IMU 量测的频率远远大于 GNSS 量测;所以用 IMU 为基准,得到的系统状态向量和协方差阵是当前 IMU 时间的,每次调用这个函数都会有新 IMU 量测。函数的计算基于当前时刻 IMU 量测和上一时刻 IMU 量测,如果两次量测之间没有 GNSS 数据,就只是进行捷联惯导递推,将系统状态和噪声递推到当前时刻;如果两次量测间有 GNSS 数据,就先捷联惯导递推到 GNSS 时刻,在 GNSS 时刻进行量测更新、误差反馈,最后再捷联惯导递推到当前时刻。
首先将当前 IMU 时间作为系统当前状态时间,也就是说这个函数执行完之后,得到的系统状态向量和协方差阵是当前 IMU 时间的:
timestamp_ = imucur_.time;
如果GNSS有效,则将量测更新时间设置为 GNSS 时间:
double updatetime = gnssdata_.isvalid ? gnssdata_.time : -1;
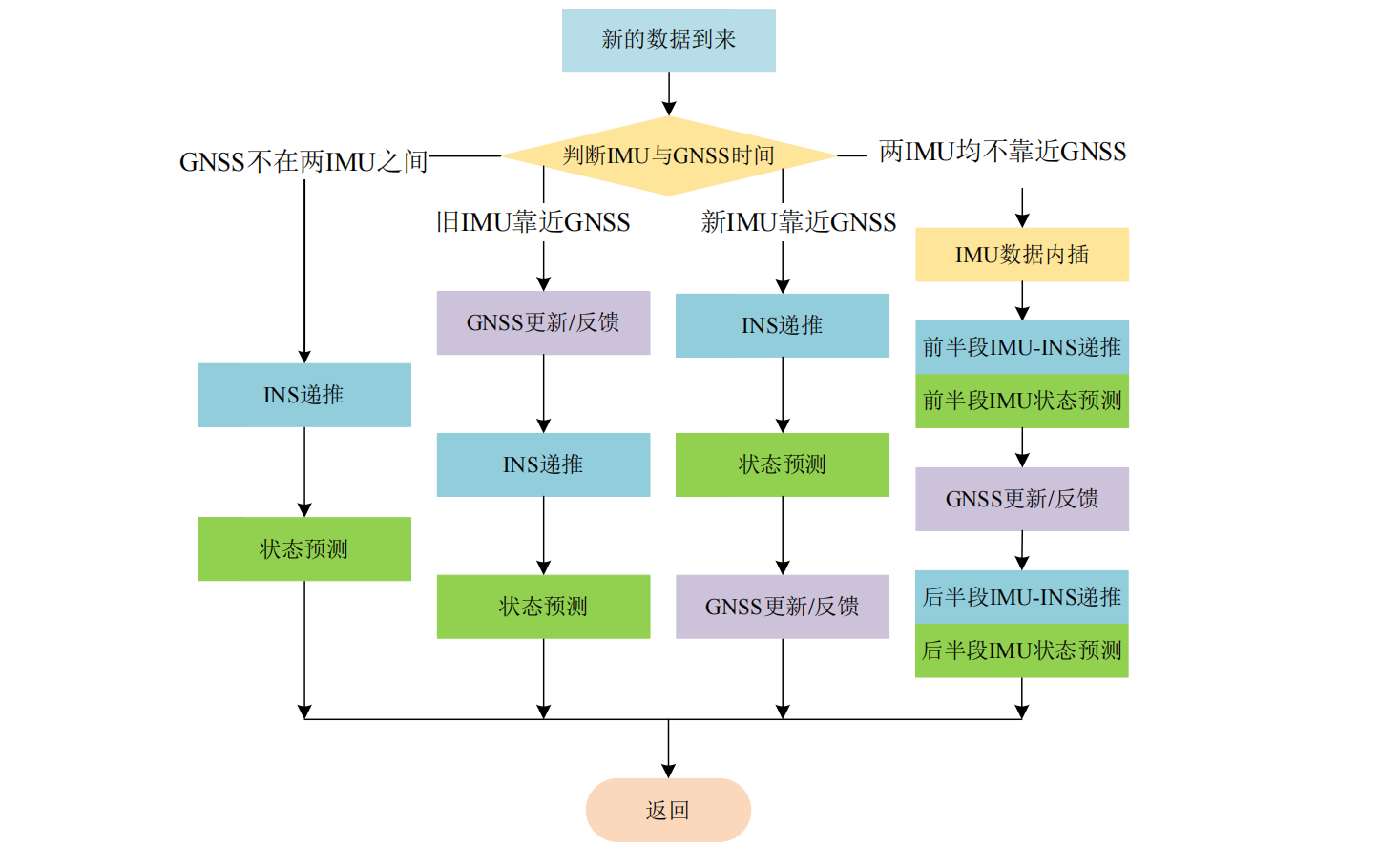
先调用 isToUpdate(),根据当前 GNSS 与当前和先前两 IMU 量测的时间关系,判断是否需要进行 GNSS 更新,有四种情况,分别返回不同的值:
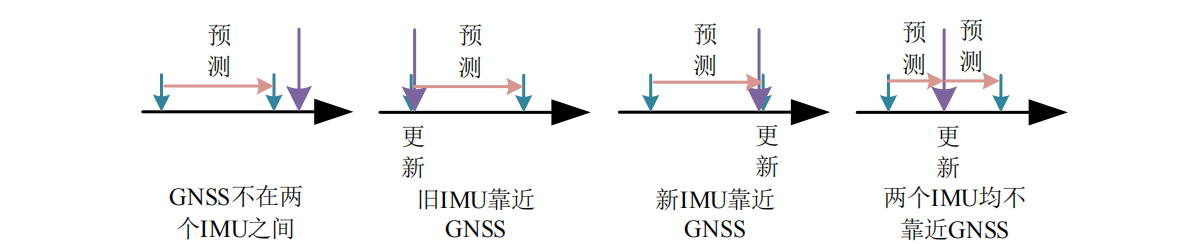
int GIEngine::isToUpdate(double imutime1, double imutime2, double updatetime) const {if (abs(imutime1 - updatetime) < TIME_ALIGN_ERR) {// 更新时间靠近imutime1// updatetime is near to imutime1return 1;} else if (abs(imutime2 - updatetime) <= TIME_ALIGN_ERR) {// 更新时间靠近imutime2// updatetime is near to imutime2return 2;} else if (imutime1 < updatetime && updatetime < imutime2) {// 更新时间在imutime1和imutime2之间, 但不靠近任何一个// updatetime is between imutime1 and imutime2, but not near to eitherreturn 3;} else {// 更新时间不在imutimt1和imutime2之间,且不靠近任何一个// updatetime is not bewteen imutime1 and imutime2, and not near to either.return 0;}
}
根据更新时间对齐误差
TIME_ALIGN_ERR评定是否靠近,默认为 0.001,也就是说时间差距在 1ms 内,认为是靠近的。文档和注释都用“靠近”这个词,起始与其说是“靠近”,更像是在说是“重合”。
返回 0,表示 GNSS 不在两个 IMU 之间,在当前 IMU 量测之后,那么只进行捷联惯导递推,调用 insPropagation() 根据两帧 IMU 量测将状态递推到当前 IMU 时间戳:
if (res == 0) {// 只传播导航状态// only propagate navigation stateinsPropagation(imupre_, imucur_);
返回 1,表示 GNSS 在两个 IMU 之间,更靠近前一个 IMU:
- 先调用
gnssUpdate()进行 GNSS 量测更新; - 再调用
stateFeedback()进行系统状态反馈; - 最后调用
insPropagation()根据两帧 IMU 量测将状态递推到当前 IMU 时间戳:
} else if (res == 1) {// GNSS数据靠近上一历元,先对上一历元进行GNSS更新// gnssdata is near to the previous imudata, we should firstly do gnss updategnssUpdate(gnssdata_);stateFeedback();pvapre_ = pvacur_;insPropagation(imupre_, imucur_);
返回 2,表示 GNSS 在两个 IMU 之间,更靠近后一个 IMU:
- 先调用
insPropagation()根据两帧 IMU 量测将状态递推到当前 IMU 时间戳; - 再调用
gnssUpdate()进行 GNSS 量测更新; - 最后调用
stateFeedback()进行系统状态反馈:
} else if (res == 2) {// GNSS数据靠近当前历元,先对当前IMU进行状态传播// gnssdata is near current imudata, we should firstly propagate navigation stateinsPropagation(imupre_, imucur_);gnssUpdate(gnssdata_);stateFeedback();返回 3,表示 GNSS 在两个 IMU 之间,不靠近任何一个:
- 先调用
imuInterpolate()根据两帧 IMU 量测插值到 GNSS 时间戳,得到 GNSS 时刻 IMU 量测值midimu; - 调用 insPropagation 根据前一个 IMU 和
midimu将状态递推到当前 GNSS 时间戳; - 再调用
gnssUpdate()进行 GNSS 量测更新,调用stateFeedback()进行系统状态反馈; - 最后再调用一次
insPropagation()根据 midimu 和当前时刻 IMU 量测将状态递推到当前 IMU 时间戳:
} else {// GNSS数据在两个IMU数据之间(不靠近任何一个), 将当前IMU内插到整秒时刻// gnssdata is between the two imudata, we interpolate current imudata to gnss timeIMU midimu;imuInterpolate(imupre_, imucur_, updatetime, midimu);// 对前一半IMU进行状态传播// propagate navigation state for the first half imudatainsPropagation(imupre_, midimu);// 整秒时刻进行GNSS更新,并反馈系统状态// do GNSS position update at the whole second and feedback system statesgnssUpdate(gnssdata_);stateFeedback();// 对后一半IMU进行状态传播// propagate navigation state for the second half imudatapvapre_ = pvacur_;insPropagation(midimu, imucur_);
}
几种情况可总结如下图:
处理完之后调用 checkCov() 检查协方差对角线元素是否都为正,更新上一时刻的状态和 IMU 数据:
// 检查协方差对角线元素是否都为正
// check diagonal elements of current covariance matrix
checkCov();
// 更新上一时刻的状态和IMU数据
// update system state and imudata at the previous epoch
pvapre_ = pvacur_;
imupre_ = imucur_;
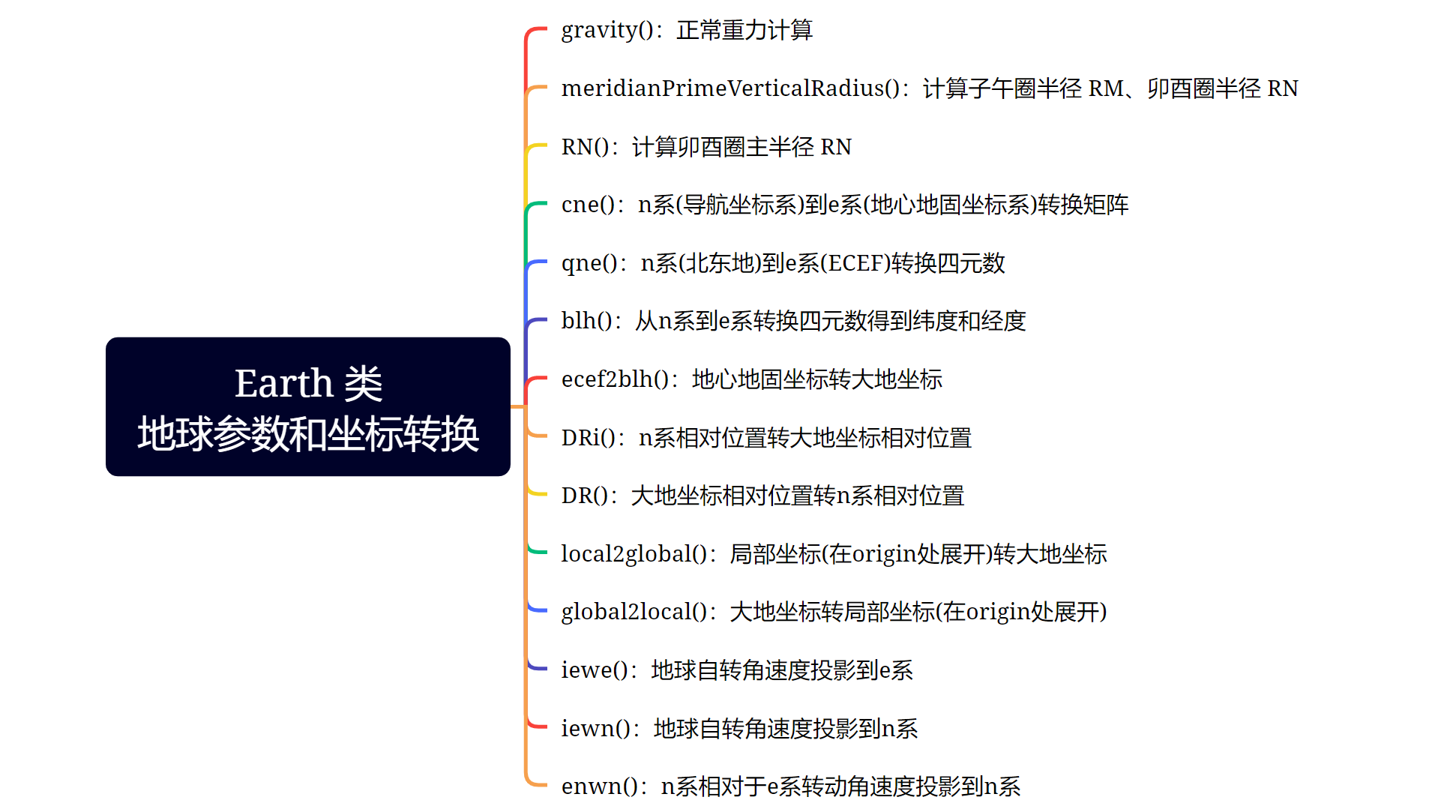
六、Earth 类:地球参数和坐标转换
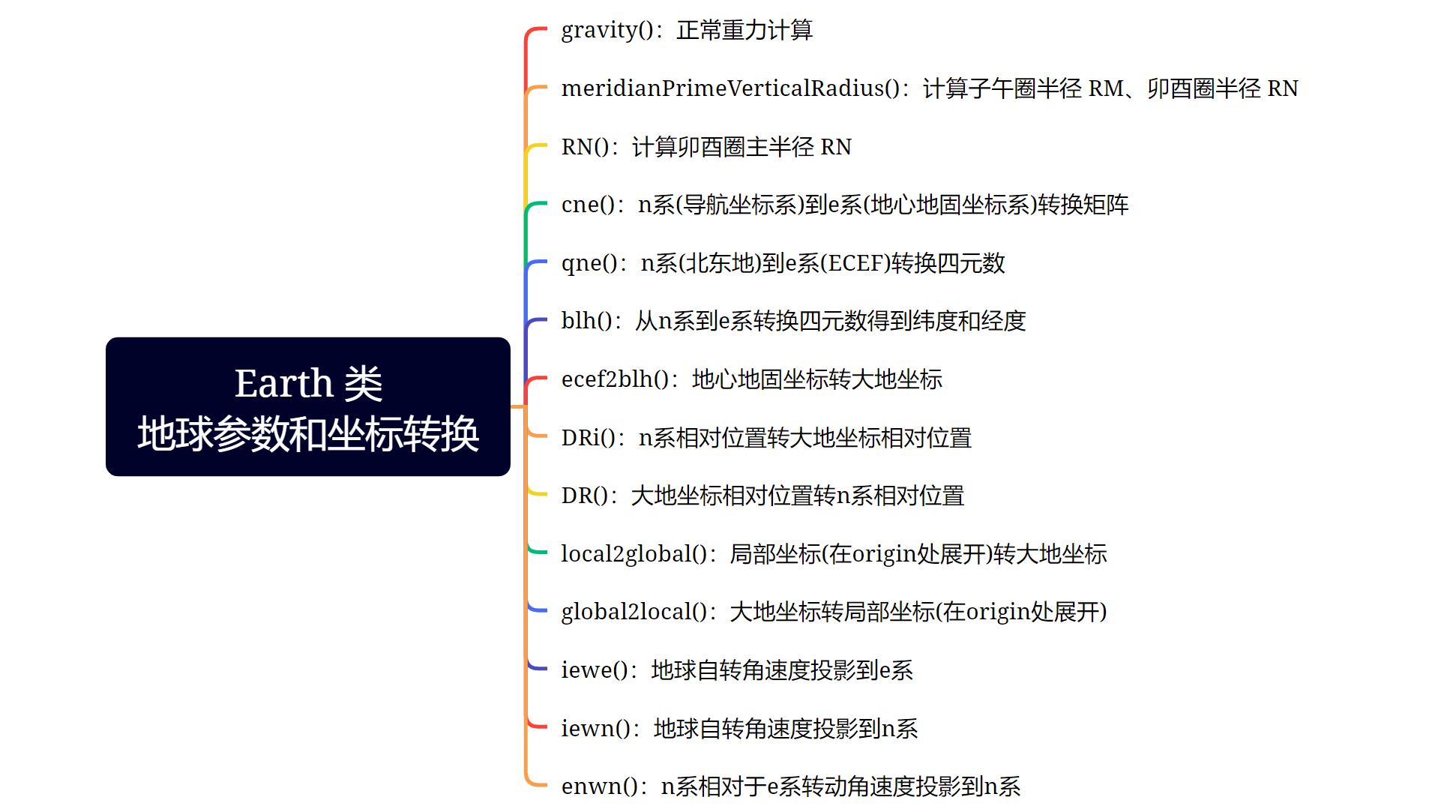
Earth 类里都是静态函数,使用的时候直接类名::成员函数(),文件的开头定义了一些椭球参数:
/* WGS84椭球模型参数NOTE:如果使用其他椭球模型需要修改椭球参数 */
const double WGS84_WIE = 7.2921151467E-5; /* 地球自转角速度*/
const double WGS84_F = 0.0033528106647474805; /* 扁率 */
const double WGS84_RA = 6378137.0000000000; /* 长半轴a */
const double WGS84_RB = 6356752.3142451793; /* 短半轴b */
const double WGS84_GM0 = 398600441800000.00; /* 地球引力常数 */
const double WGS84_E1 = 0.0066943799901413156; /* 第一偏心率平方 */
const double WGS84_E2 = 0.0067394967422764341; /* 第二偏心率平方 */
1、gravity():正常重力计算
重力是万有引力与离心力共同作用的结果,随纬度升高离心力增大但引力减小、随高程升高引力减小,共同作用下重力的计算公式如下:
g L = 9.7803267715 × ( 1 + 0.0052790414 × sin 2 L − 0.0000232718 × sin 2 2 L ) + h × ( 0.0000000043977311 × sin 2 L − 0.0000030876910891 ) + 0.0000000000007211 × sin 4 2 L g_{L}=9.7803267715 \times\left(1+0.0052790414 \times \sin ^{2} L-0.0000232718 \times \sin ^{2} 2 L\right) \\ +h\times(0.0000000043977311\times\sin ^{2} L-0.0000030876910891)+0.0000000000007211\times\sin ^{4} 2 L gL=9.7803267715×(1+0.0052790414×sin2L−0.0000232718×sin22L)+h×(0.0000000043977311×sin2L−0.0000030876910891)+0.0000000000007211×sin42L
static double gravity(const Vector3d &blh) {double sin2 = sin(blh[0]);sin2 *= sin2;return 9.7803267715 * (1 + 0.0052790414 * sin2 + 0.0000232718 * sin2 * sin2) +blh[2] * (0.0000000043977311 * sin2 - 0.0000030876910891) + 0.0000000000007211 * blh[2] * blh[2];
}
2、meridianPrimeVerticalRadius():计算子午圈半径 RM、卯酉圈半径 RN
返回值是 Vector2d,第一个是子午圈主曲率半径 RM、第二个是卯酉圈主半径 RN:
R M = R e ( 1 − e 2 ) ( 1 − e 2 sin 2 L ) 3 / 2 、 R N = R e 1 − e 2 sin 2 L R_{M}=\frac{R_{e}\left(1-e^{2}\right)}{\left(1-e^{2} \sin ^{2} L\right)^{3 / 2}}、R_{N}=\frac{R_{e}}{\sqrt{1-e^{2} \sin ^{2} L}} RM=(1−e2sin2L)3/2Re(1−e2)、RN=1−e2sin2LRe
static Eigen::Vector2d meridianPrimeVerticalRadius(double lat) {double tmp, sqrttmp;tmp = sin(lat); tmp *= tmp;tmp = 1 - WGS84_E1 * tmp;sqrttmp = sqrt(tmp);return {WGS84_RA * (1 - WGS84_E1) / (sqrttmp * tmp), WGS84_RA / sqrttmp};
}
3、RN():计算卯酉圈主半径 RN
R N = R e 1 − e 2 sin 2 L R_{N}=\frac{R_{e}}{\sqrt{1-e^{2} \sin ^{2} L}} RN=1−e2sin2LRe
static double RN(double lat) {double sinlat = sin(lat);return WGS84_RA / sqrt(1.0 - WGS84_E1 * sinlat * sinlat);
}
4、cne():n系(导航坐标系)到e系(地心地固坐标系)转换矩阵
C e n = [ − sin φ 0 cos φ 0 1 0 − cos φ 0 − sin φ ] [ cos λ sin λ 0 − sin λ cos λ 0 0 0 1 ] = [ − sin φ cos λ − sin φ sin λ cos φ − sin λ cos λ 0 − cos φ cos λ − cos φ sin λ − sin φ ] C_{e}^{n}=\left[\begin{array}{ccc}-\sin \varphi & 0 & \cos \varphi \\ 0 & 1 & 0 \\ -\cos \varphi & 0 & -\sin \varphi\end{array}\right]\left[\begin{array}{ccc}\cos \lambda & \sin \lambda & 0 \\ -\sin \lambda & \cos \lambda & 0 \\ 0 & 0 & 1\end{array}\right]=\\ \left[\begin{array}{ccc}-\sin \varphi \cos \lambda & -\sin \varphi \sin \lambda & \cos \varphi \\ -\sin \lambda & \cos \lambda & 0 \\ -\cos \varphi \cos \lambda & -\cos \varphi \sin \lambda & -\sin \varphi\end{array}\right] Cen= −sinφ0−cosφ010cosφ0−sinφ cosλ−sinλ0sinλcosλ0001 = −sinφcosλ−sinλ−cosφcosλ−sinφsinλcosλ−cosφsinλcosφ0−sinφ
static Matrix3d cne(const Vector3d &blh) {double coslon, sinlon, coslat, sinlat;sinlat = sin(blh[0]);sinlon = sin(blh[1]);coslat = cos(blh[0]);coslon = cos(blh[1]);Matrix3d dcm;dcm(0, 0) = -sinlat * coslon;dcm(0, 1) = -sinlon;dcm(0, 2) = -coslat * coslon;dcm(1, 0) = -sinlat * sinlon;dcm(1, 1) = coslon;dcm(1, 2) = -coslat * sinlon;dcm(2, 0) = coslat;dcm(2, 1) = 0;dcm(2, 2) = -sinlat;return dcm;
}
5、qne():计算n系(北东地)到e系(ECEF)转换四元数
位置更新的时候,调用此函数根据上一时刻经纬度,得到上一时刻的 qne,然后 qee * qne * qnn 得到当前时刻的 qne,再调用下面的 blh() 得到经纬度。
q n e = [ cos ( − π / 4 − φ / 2 ) cos ( λ / 2 ) − sin ( − π / 4 − φ / 2 ) sin ( λ / 2 ) sin ( − π / 4 − φ / 2 ) cos ( λ / 2 ) cos ( − π / 4 − sin / 2 ) sin ( λ / 2 ) ] ] \boldsymbol{q}_{n}^{e}=\left[\begin{array}{c}\cos (-\pi / 4-\varphi / 2) \cos (\lambda / 2) \\ -\sin (-\pi / 4-\varphi / 2) \sin (\lambda / 2) \\ \sin (-\pi / 4-\varphi / 2) \cos (\lambda / 2) \\ \cos (-\pi / 4-\sin / 2) \sin (\lambda / 2)]\end{array}\right] qne= cos(−π/4−φ/2)cos(λ/2)−sin(−π/4−φ/2)sin(λ/2)sin(−π/4−φ/2)cos(λ/2)cos(−π/4−sin/2)sin(λ/2)]
/* n系(导航坐标系)到e系(地心地固坐标系)转换四元数 */
static Quaterniond qne(const Vector3d &blh) {Quaterniond quat;double coslon, sinlon, coslat, sinlat;coslon = cos(blh[1] * 0.5);sinlon = sin(blh[1] * 0.5);coslat = cos(-M_PI * 0.25 - blh[0] * 0.5);sinlat = sin(-M_PI * 0.25 - blh[0] * 0.5);quat.w() = coslat * coslon;quat.x() = -sinlat * sinlon;quat.y() = sinlat * coslon;quat.z() = coslat * sinlon;return quat;
}
6、blh():从n系到e系转换四元数得到纬度和经度
位置更新的时候,通过算当前时刻 n 系到 e 系转换四元数 qne,然后调用此函数得到经纬度。
/* 从n系到e系转换四元数得到纬度和经度 */
static Vector3d blh(const Quaterniond &qne, double height) {return {-2 * atan(qne.y() / qne.w()) - M_PI * 0.5, 2 * atan2(qne.z(), qne.w()), height};
}
7、blh2ecef():大地坐标(纬度、经度和高程)转地心地固坐标
x = ( R N + h ) cos L cos λ y = ( R N + h ) cos L sin λ z = [ R N ( 1 − e 2 ) + h ] sin L \begin{array}{l}x=\left(R_{N}+h\right) \cos L \cos \lambda \\ y=\left(R_{N}+h\right) \cos L \sin \lambda \\ z=\left[R_{N}\left(1-e^{2}\right)+h\right] \sin L\end{array} x=(RN+h)cosLcosλy=(RN+h)cosLsinλz=[RN(1−e2)+h]sinL
/* 大地坐标(纬度、经度和高程)转地心地固坐标 */
static Vector3d blh2ecef(const Vector3d &blh) {double coslat, sinlat, coslon, sinlon;double rnh, rn;coslat = cos(blh[0]);sinlat = sin(blh[0]);coslon = cos(blh[1]);sinlon = sin(blh[1]);rn = RN(blh[0]);rnh = rn + blh[2];return {rnh * coslat * coslon, rnh * coslat * sinlon, (rnh - rn * WGS84_E1) * sinlat};
}
7、ecef2blh():地心地固坐标转大地坐标
B 0 = arctan ( Z ( 1 − e 2 ) p ) N k = a 1 − e 2 sin 2 B k − 1 H k = p cos B k − 1 − N k B k = arctan ( z ( 1 − e 2 N k N k ) p ) \begin{array}{c}B_{0}=\arctan \left(\frac{Z}{\left(1-e^{2}\right) p}\right) \\ N_{k}=\frac{a}{\sqrt{1-e^{2} \sin ^{2} B_{k-1}}} \\ H_{k}=\frac{p}{\cos B_{k-1}}-N_{k} \\ B_{k}=\arctan \left(\frac{z}{\left(1-\frac{e^{2} N_{k}}{N_{k}}\right)\ p }\right)\end{array} B0=arctan((1−e2)pZ)Nk=1−e2sin2Bk−1aHk=cosBk−1p−NkBk=arctan (1−Nke2Nk) pz
static Vector3d ecef2blh(const Vector3d &ecef) {double p = sqrt(ecef[0] * ecef[0] + ecef[1] * ecef[1]);double rn;double lat, lon;double h = 0, h2;// 初始状态lat = atan(ecef[2] / (p * (1.0 - WGS84_E1)));lon = 2.0 * atan2(ecef[1], ecef[0] + p);do {h2 = h;rn = RN(lat);h = p / cos(lat) - rn;lat = atan(ecef[2] / (p * (1.0 - WGS84_E1 * rn / (rn + h))));} while (fabs(h - h2) > 1.0e-4);return {lat, lon, h};
}
8、DRi():n系相对位置转大地坐标相对位置
[ δ φ δ L δ H ] = [ ( R M + H ) − 1 0 0 0 ( R N + H ) − 1 0 0 0 − 1 ] [ δ p N δ p E δ p B ] \left[\begin{array}{l}\delta \varphi \\ \delta L \\ \delta H\end{array}\right]=\left[\begin{array}{ccc}\left(R_{M}+H\right)^{-1} & 0 & 0 \\ 0 & \left(R_{N}+H\right)^{-1} & 0 \\ 0 & 0 & -1 \end{array}\right]\left[\begin{array}{l}\delta \boldsymbol{p}_{N} \\ \delta \boldsymbol{p}_{E} \\ \delta \boldsymbol{p}_{B}\end{array}\right] δφδLδH = (RM+H)−1000(RN+H)−1000−1 δpNδpEδpB
/* n系相对位置转大地坐标相对位置 */
static Matrix3d DRi(const Vector3d &blh) {Matrix3d dri = Matrix3d::Zero();Eigen::Vector2d rmn = meridianPrimeVerticalRadius(blh[0]);dri(0, 0) = 1.0 / (rmn[0] + blh[2]);dri(1, 1) = 1.0 / ((rmn[1] + blh[2]) * cos(blh[0]));dri(2, 2) = -1;return dri;
}
9、DR():大地坐标相对位置转n系相对位置
[ δ φ δ L δ H ] = [ ( R M + H ) − 1 0 0 0 ( R N + H ) − 1 0 0 0 − 1 ] [ δ p N δ p E δ p B ] \left[\begin{array}{l}\delta \varphi \\ \delta L \\ \delta H\end{array}\right]=\left[\begin{array}{ccc}\left(R_{M}+H\right)^{-1} & 0 & 0 \\ 0 & \left(R_{N}+H\right)^{-1} & 0 \\ 0 & 0 & -1 \end{array}\right]\left[\begin{array}{l}\delta \boldsymbol{p}_{N} \\ \delta \boldsymbol{p}_{E} \\ \delta \boldsymbol{p}_{B}\end{array}\right] δφδLδH = (RM+H)−1000(RN+H)−1000−1 δpNδpEδpB
/* 大地坐标相对位置转n系相对位置 */
static Matrix3d DR(const Vector3d &blh) {Matrix3d dr = Matrix3d::Zero();Eigen::Vector2d rmn = meridianPrimeVerticalRadius(blh[0]);dr(0, 0) = rmn[0] + blh[2];dr(1, 1) = (rmn[1] + blh[2]) * cos(blh[0]);dr(2, 2) = -1;return dr;
}
10、local2global():局部坐标(在origin处展开)转大地坐标
在 enwn() 中被调用,为了方便能直接传入北东地(n 系)坐标计算 n 系相对于 e 系转动角速度在 n 系的投影。
static Vector3d local2global(const Vector3d &origin, const Vector3d &local) {Vector3d ecef0 = blh2ecef(origin);Matrix3d cn0e = cne(origin);Vector3d ecef1 = ecef0 + cn0e * local;Vector3d blh1 = ecef2blh(ecef1);return blh1;
}
11、global2local():大地坐标转局部坐标(在origin处展开)
好像整个程序中都没用到这个函数。
static Vector3d global2local(const Vector3d &origin, const Vector3d &global) {Vector3d ecef0 = blh2ecef(origin);Matrix3d cn0e = cne(origin);Vector3d ecef1 = blh2ecef(global);return cn0e.transpose() * (ecef1 - ecef0);
}
static Pose global2local(const Vector3d &origin, const Pose &global) {Pose local;Vector3d ecef0 = blh2ecef(origin);Matrix3d cn0e = cne(origin);Vector3d ecef1 = blh2ecef(global.t);Matrix3d cn1e = cne(global.t);local.t = cn0e.transpose() * (ecef1 - ecef0);local.R = cn0e.transpose() * cn1e * global.R;return local;
}
12、iewe():地球自转角速度投影到e系
ω i e e = [ 0 0 ω e ] T \boldsymbol{\omega}_{i e}^{e}=\left[\begin{array}{lll}0 & 0 & \omega_{e}\end{array}\right]^{T} ωiee=[00ωe]T
static Vector3d iewe() {return {0, 0, WGS84_WIE};
}
13、iewn():地球自转角速度投影到n系
ω i e n = [ ω e cos φ 0 − ω e sin φ ] T \boldsymbol{\omega}_{i e}^{n}=\left[\begin{array}{lll}\omega_{e} \cos \varphi & 0 & -\omega_{e} \sin \varphi\end{array}\right]^{T} ωien=[ωecosφ0−ωesinφ]T
static Vector3d iewn(double lat) {return {WGS84_WIE * cos(lat), 0, -WGS84_WIE * sin(lat)};
}
也可以直接传入北东地(n 系)坐标计算:
static Vector3d iewn(const Vector3d &origin, const Vector3d &local) {Vector3d global = local2global(origin, local);return iewn(global[0]);
}
14、enwn():n系相对于e系转动角速度投影到n系
由载体运动线速度和地球曲率引起,与东向、北向速度有关,与天向速度无关
ω e n n = [ v E R N + h − v N R M + h − v E tan φ R N + h ] T \boldsymbol{\omega}_{e n}^{n}=\left[\begin{array}{lll}\frac{v_{E}}{R_{N}+h} & \frac{-v_{N}}{R_{M}+h} & -\frac{v_{E} \tan \varphi}{R_{N}+h}\end{array}\right]^{T} ωenn=[RN+hvERM+h−vN−RN+hvEtanφ]T
static Vector3d enwn(const Eigen::Vector2d &rmn, const Vector3d &blh, const Vector3d &vel) {return {vel[1] / (rmn[1] + blh[2]), -vel[0] / (rmn[0] + blh[2]), -vel[1] * tan(blh[0]) / (rmn[1] + blh[2])};
}
同样也可以直接传入北东地(n 系)坐标计算:
static Vector3d enwn(const Vector3d &origin, const Vector3d &local, const Vector3d &vel) {Vector3d global = local2global(origin, local);Eigen::Vector2d rmn = meridianPrimeVerticalRadius(global[0]);return enwn(rmn, global, vel);
}
七、捷联惯导更新:insPropagation()
1、insPropagation():捷联惯导递推
根据两帧的 IMU 量测,将系统状态和误差状态从前一个 IMU 时间递推到后一个 IMU 时间;主要有三个步骤:IMU 误差补偿、状态更新(机械编排)、噪声传播。
先调用 imuCompensate(),补偿当前时刻 IMU 量测,就是减去零偏、除以加上单位阵后的比例:
imuCompensate(imucur);
调用 insMech() 依次进行速度更新、位置更新、姿态更新:
INSMech::insMech(pvapre_, pvacur_, imupre, imucur);
之后一大段是噪声传播,后面详细介绍。
2、imuCompensate():IMU数据误差补偿
减去零偏、除以加上单位阵后的比例:
diag ( I + s ‾ g ) − 1 ( ω ~ i b b − b ‾ g ) = ω ^ i b b diag ( I + s ‾ a ) − 1 ( f ~ i b b − b ‾ a ) = f ^ i b b \begin{array}{l}\operatorname{diag}\left(\boldsymbol{I}+\overline{\boldsymbol{s}}_{g}\right)^{-1}\left(\tilde{\boldsymbol{\omega}}_{i b}^{b}-\overline{\boldsymbol{b}}_{g}\right)=\hat{\boldsymbol{\omega}}_{i b}^{b} \\ \operatorname{diag}\left(\boldsymbol{I}+\overline{\boldsymbol{s}}_{a}\right)^{-1}\left(\tilde{\boldsymbol{f}}_{i b}^{b}-\overline{\boldsymbol{b}}_{a}\right)=\hat{\boldsymbol{f}}_{i b}^{b}\end{array} diag(I+sg)−1(ω~ibb−bg)=ω^ibbdiag(I+sa)−1(f~ibb−ba)=f^ibb
void GIEngine::imuCompensate(IMU &imu) {// 补偿IMU零偏// compensate the imu biasimu.dtheta -= imuerror_.gyrbias * imu.dt;imu.dvel -= imuerror_.accbias * imu.dt;// 补偿IMU比例因子// compensate the imu scaleEigen::Vector3d gyrscale, accscale;gyrscale = Eigen::Vector3d::Ones() + imuerror_.gyrscale;accscale = Eigen::Vector3d::Ones() + imuerror_.accscale;imu.dtheta = imu.dtheta.cwiseProduct(gyrscale.cwiseInverse());imu.dvel = imu.dvel.cwiseProduct(accscale.cwiseInverse());
}
3、insMech():IMU 状态更新(机械编排)
依次进行速度更新、位置更新、姿态更新,不可调换顺序。
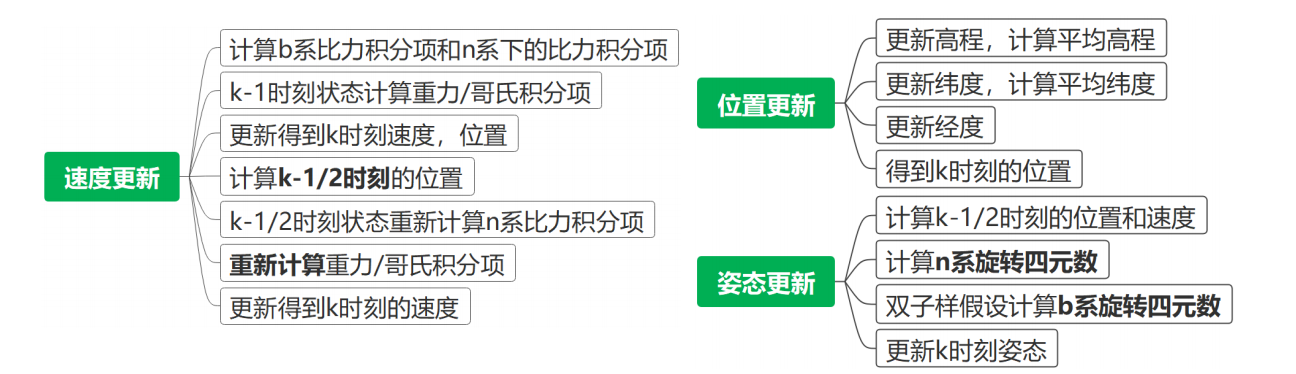
void INSMech::insMech(const PVA &pvapre, PVA &pvacur, const IMU &imupre, const IMU &imucur) {// perform velocity update, position updata and attitude update in sequence, irreversible order// 依次进行速度更新、位置更新、姿态更新, 不可调换顺序velUpdate(pvapre, pvacur, imupre, imucur);posUpdate(pvapre, pvacur, imupre, imucur);attUpdate(pvapre, pvacur, imupre, imucur);
}
值得一提的是:
- PVA 更新都是先计算中间时刻,再由此计算当前时刻。
- 位置更新中:先计算 n 系到 e 系旋转四元数,再调用
blh()计算经纬度。 - 我觉得因为 PVA 写成三个函数,部分计算过程有重复,写在同一个函数实现能更简洁一些。
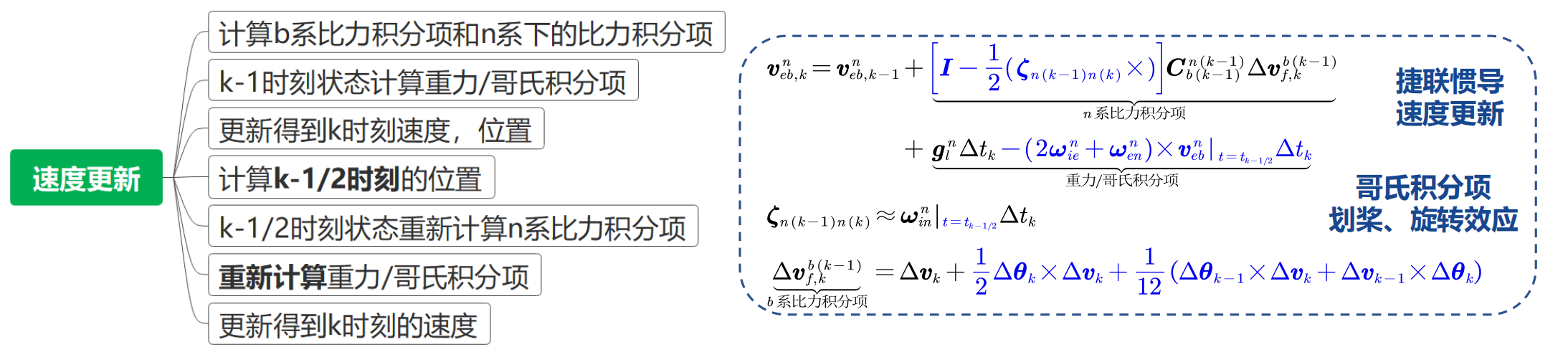
4、velUpdate():速度更新
先定义解算过程中涉及的中间变量:
Eigen::Vector3d d_vfb, d_vfn, d_vgn, gl, midvel, midpos;
Eigen::Vector3d temp1, temp2, temp3;
Eigen::Matrix3d cnn, I33 = Eigen::Matrix3d::Identity();
Eigen::Quaterniond qne, qee, qnn, qbb, q1, q2;
调用 meridianPrimeVerticalRadius(),根据上一时刻位置计算子午圈、卯酉圈半径:
R M = R e ( 1 − e 2 ) ( 1 − e 2 sin 2 L ) 3 / 2 、 R N = R e 1 − e 2 sin 2 L R_{M}=\frac{R_{e}\left(1-e^{2}\right)}{\left(1-e^{2} \sin ^{2} L\right)^{3 / 2}}、R_{N}=\frac{R_{e}}{\sqrt{1-e^{2} \sin ^{2} L}} RM=(1−e2sin2L)3/2Re(1−e2)、RN=1−e2sin2LRe
Eigen::Vector2d rmrn = Earth::meridianPrimeVerticalRadius(pvapre.pos(0));
计算地球自转引起的导航系旋转 wie_n:
ω i e n = [ ω e cos φ 0 − ω e sin φ ] T \boldsymbol{\omega}_{i e}^{n}=\left[\begin{array}{lll}\omega_{e} \cos \varphi & 0 & -\omega_{e} \sin \varphi\end{array}\right]^{\mathrm{T}} ωien=[ωecosφ0−ωesinφ]T
wie_n << WGS84_WIE * cos(pvapre.pos[0]), 0, -WGS84_WIE * sin(pvapre.pos[0]);
计算载体在地球表面移动因地球曲率引起的导航系旋转 wen_n:
ω e n n = [ v E / ( R N + h ) − v N / ( R M + h ) − v E tan φ / ( R N + h ) ] \boldsymbol{\omega}_{e n}^{n}=\left[\begin{array}{c}v_{E} /\left(R_{N}+h\right) \\ -v_{N} /\left(R_{M}+h\right) \\ -v_{E} \tan \varphi /\left(R_{N}+h\right)\end{array}\right] ωenn= vE/(RN+h)−vN/(RM+h)−vEtanφ/(RN+h)
wen_n << pvapre.vel[1] / (rmrn[1] + pvapre.pos[2]), -pvapre.vel[0] / (rmrn[0] + pvapre.pos[2]),-pvapre.vel[1] * tan(pvapre.pos[0]) / (rmrn[1] + pvapre.pos[2]);
调用 gravity(),根据上一时刻位置计算 重力 gravity:
g L = 9.7803267715 × ( 1 + 0.0052790414 × sin 2 L − 0.0000232718 × sin 2 2 L ) + h × ( 0.0000000043977311 × sin 2 L − 0.0000030876910891 ) + 0.0000000000007211 × sin 4 2 L g_{L}=9.7803267715 \times\left(1+0.0052790414 \times \sin ^{2} L-0.0000232718 \times \sin ^{2} 2 L\right) \\ +h\times(0.0000000043977311\times\sin ^{2} L-0.0000030876910891)+0.0000000000007211\times\sin ^{4} 2 L gL=9.7803267715×(1+0.0052790414×sin2L−0.0000232718×sin22L)+h×(0.0000000043977311×sin2L−0.0000030876910891)+0.0000000000007211×sin42L
double gravity = Earth::gravity(pvapre.pos);
计算 b 系比力积分项 d_vfb,单子样 + 前一周期补偿划桨效应:
Δ v f , k − 1 ) b ( k − 1 ) ⏟ b 系比力积分项 = Δ v k + 1 2 Δ θ k × Δ v k + 1 12 ( Δ θ k − 1 × Δ v k + Δ v k − 1 × Δ θ k ) \underbrace{\Delta \boldsymbol{v}_{f, k-1)}^{b(k-1)}}_{b \text { 系比力积分项 }}=\Delta \boldsymbol{v}_{k}+\frac{1}{2} \Delta \boldsymbol{\theta}_{k} \times \Delta \boldsymbol{v}_{k}+\frac{1}{12}\left(\Delta \boldsymbol{\theta}_{k-1} \times \Delta \boldsymbol{v}_{k}+\Delta \boldsymbol{v}_{k-1} \times \Delta \boldsymbol{\theta}_{k}\right) b 系比力积分项 Δvf,k−1)b(k−1)=Δvk+21Δθk×Δvk+121(Δθk−1×Δvk+Δvk−1×Δθk)
// 旋转效应和双子样划桨效应
// rotational and sculling motion
temp1 = imucur.dtheta.cross(imucur.dvel) / 2;
temp2 = imupre.dtheta.cross(imucur.dvel) / 12;
temp3 = imupre.dvel.cross(imucur.dtheta) / 12;
// b系比力积分项
// velocity increment due to the specific force
d_vfb = imucur.dvel + temp1 + temp2 + temp3;
比力积分项投影到 n 系,三行代码分别对应的公式为:
ω i n n = ω i e n + ω e n n {\omega}_{i n}^{n}={\omega}_{i e}^{n}+{\omega}_{e n}^{n} ωinn=ωien+ωenn
ζ n ( k − 1 ) n ( k ) ≈ ω i n n ∣ t = t k − 1 / 2 Δ t k \left.\boldsymbol{\zeta}_{n(k-1) n(k)} \approx \boldsymbol{\omega}_{i n}^{n}\right|_{t=t_{k-1 / 2}} \Delta t_{k} ζn(k−1)n(k)≈ωinn t=tk−1/2Δtk
[ I − 1 2 ( ζ n ( k − 1 ) n ( k ) × ) ] C b ( k − 1 ) n ( k − 1 ) Δ v f , k b ( k − 1 ) ⏟ n 系比力积分项 \underbrace{\left[\boldsymbol{I}-\frac{1}{2}\left(\boldsymbol{\zeta}_{n(k-1) n(k)} \times\right)\right] \boldsymbol{C}_{b(k-1)}^{n(k-1)} \Delta \boldsymbol{v}_{f, k}^{b(k-1)}}_{n \text { 系比力积分项 }} n 系比力积分项 [I−21(ζn(k−1)n(k)×)]Cb(k−1)n(k−1)Δvf,kb(k−1)
// 比力积分项投影到n系
// velocity increment dut to the specfic force projected to the n-frame
temp1 = (wie_n + wen_n) * imucur.dt / 2;
cnn = I33 - Rotation::skewSymmetric(temp1);
d_vfn = cnn * pvapre.att.cbn * d_vfb;
计算重力/哥式积分项:
g l n Δ t k − ( 2 ω i n + ω e n n ) × v e b n ∣ t = t k − 1 / 2 Δ t k ⏟ 重力/哥氏积分项 \underbrace{\boldsymbol{g}_{l}^{n} \Delta t_{k}-\left(2 \boldsymbol{\omega}_{i}^{n}+\boldsymbol{\omega}_{e n}^{n}\right) \times\left.\boldsymbol{v}_{e b}^{n}\right|_{t=t_{k-1 / 2}} \Delta t_{k}}_{\text {重力/哥氏积分项 }} 重力/哥氏积分项 glnΔtk−(2ωin+ωenn)×vebn∣t=tk−1/2Δtk
// 计算重力/哥式积分项
// velocity increment due to the gravity and Coriolis force
gl << 0, 0, gravity;
d_vgn = (gl - (2 * wie_n + wen_n).cross(pvapre.vel)) * imucur.dt;
上一时刻速度加上一半比力积分项和比力积分项,得到中间时刻速度:
// 得到中间时刻速度
// velocity at k-1/2
midvel = pvapre.vel + (d_vfn + d_vgn) / 2;
外推得到中间时刻位置:
- 计算两时刻n系旋转四元数
qnn - 根据地球自转角速率,计算两时刻e系旋转四元数
qee - 调用
qne根据先前时刻位置,计算先前时刻n系到e系旋转四元数qne - 当前时刻 n 系到 e 系旋转四元数
qne= 两时刻e系旋转四元数 * 先前n系到e系旋转四元数 * 两时刻 n 系旋转四元数 - 中间时刻高程 = 先前高程 - 高程方向速度 * 一半采样周期(因为北东地,计算出的速度时地向的,所以减)
- 调用
blh()根据 n系到e系旋转四元数计算经纬度
// 外推得到中间时刻位置
// position extrapolation to k-1/2
qnn = Rotation::rotvec2quaternion(temp1);
temp2 << 0, 0, -WGS84_WIE * imucur.dt / 2;
qee = Rotation::rotvec2quaternion(temp2);
qne = Earth::qne(pvapre.pos);
qne = qee * qne * qnn;
midpos[2] = pvapre.pos[2] - midvel[2] * imucur.dt / 2;
midpos = Earth::blh(qne, midpos[2]);
基于用中间时刻的位置,重新做一遍之前的操作:
- 重新计算中间时刻的地理参数:
rmrn、wie_n、wen_n(重力没重算) - 重新计算 n 系下平均比力积分项:
d_vfn - 重新计算重力、哥式积分项:
d_vgn
// 重新计算中间时刻的 rmrn, wie_e, wen_n
// recompute rmrn, wie_n, and wen_n at k-1/2
rmrn = Earth::meridianPrimeVerticalRadius(midpos[0]);
wie_n << WGS84_WIE * cos(midpos[0]), 0, -WGS84_WIE * sin(midpos[0]);
wen_n << midvel[1] / (rmrn[1] + midpos[2]), -midvel[0] / (rmrn[0] + midpos[2]),-midvel[1] * tan(midpos[0]) / (rmrn[1] + midpos[2]);// 重新计算n系下平均比力积分项
// recompute d_vfn
temp3 = (wie_n + wen_n) * imucur.dt / 2;
cnn = I33 - Rotation::skewSymmetric(temp3);
d_vfn = cnn * pvapre.att.cbn * d_vfb;// 重新计算重力、哥式积分项
// recompute d_vgn
gl << 0, 0, Earth::gravity(midpos);
d_vgn = (gl - (2 * wie_n + wen_n).cross(midvel)) * imucur.dt;
最后,用上一时刻的速度,加上n系下平均比力积分项、重力/哥式积分项,得到当前时刻速度:
v e b , k n = v e b , k − 1 n + [ I − 1 2 ( ζ n ( k − 1 ) n ( k ) × ) ] C b ( k − 1 ) n ( k − 1 ) Δ v f , k b ( k − 1 ) ⏟ n 系比力积分项 + g l n Δ t k − ( 2 ω i n + ω e n n ) × v e b n ∣ t = t k − 1 / 2 Δ t k ⏟ 重力/哥氏积分项 \begin{aligned} \boldsymbol{v}_{e b, k}^{n}=\boldsymbol{v}_{e b, k-1}^{n} & +\underbrace{\left[\boldsymbol{I}-\frac{1}{2}\left(\boldsymbol{\zeta}_{n(k-1) n(k)} \times\right)\right] \boldsymbol{C}_{b(k-1)}^{n(k-1)} \Delta \boldsymbol{v}_{f, k}^{b(k-1)}}_{n \text { 系比力积分项 }} \\ & +\underbrace{\boldsymbol{g}_{l}^{n} \Delta t_{k}-\left(2 \boldsymbol{\omega}_{i}^{n}+\boldsymbol{\omega}_{e n}^{n}\right) \times\left.\boldsymbol{v}_{e b}^{n}\right|_{t=t_{k-1 / 2}} \Delta t_{k}}_{\text {重力/哥氏积分项 }}\end{aligned} veb,kn=veb,k−1n+n 系比力积分项 [I−21(ζn(k−1)n(k)×)]Cb(k−1)n(k−1)Δvf,kb(k−1)+重力/哥氏积分项 glnΔtk−(2ωin+ωenn)×vebn∣t=tk−1/2Δtk
pvacur.vel = pvapre.vel + d_vfn + d_vgn;
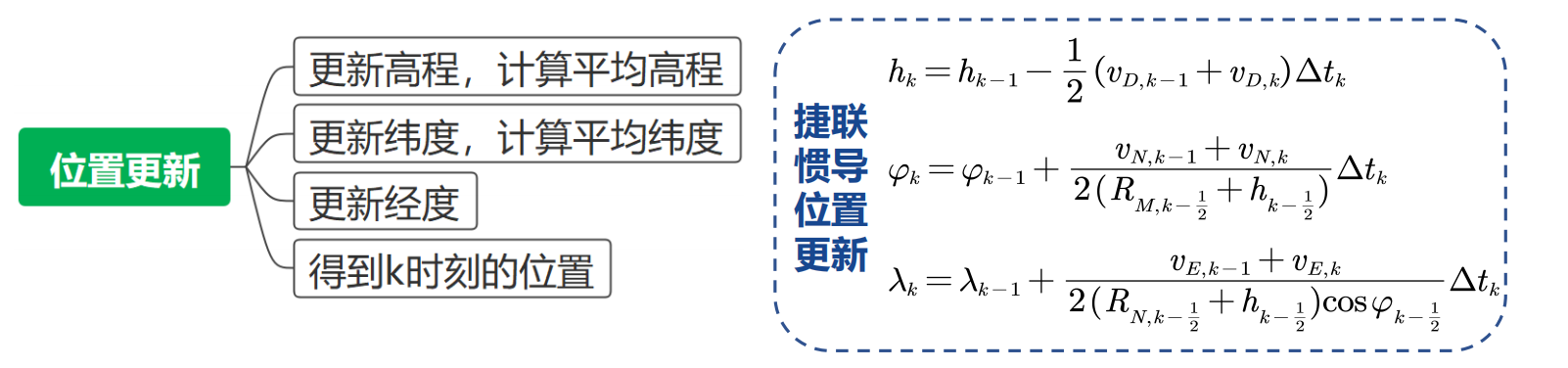
5、posUpdate():位置更新
先定义解算过程中涉及的中间变量:
Eigen::Vector3d temp1, temp2, midvel, midpos;
Eigen::Quaterniond qne, qee, qnn;
重新计算中间时刻的速度 midvel 和位置 midpos:
- 中间时刻速度:取两时刻的平均。
- 中间时刻位置:上一时刻位置 + 平均速度 * 一半采样间隔。
// 重新计算中间时刻的速度和位置
// recompute velocity and position at k-1/2
midvel = (pvacur.vel + pvapre.vel) / 2;
midpos = pvapre.pos + Earth::DRi(pvapre.pos) * midvel * imucur.dt / 2;
根据中间时刻位置, 重新计算中间时刻地理参数(除了重力):
// 重新计算中间时刻地理参数
// recompute rmrn, wie_n, wen_n at k-1/2
Eigen::Vector2d rmrn;
Eigen::Vector3d wie_n, wen_n;
rmrn = Earth::meridianPrimeVerticalRadius(midpos[0]);
wie_n << WGS84_WIE * cos(midpos[0]), 0, -WGS84_WIE * sin(midpos[0]);
wen_n << midvel[1] / (rmrn[1] + midpos[2]), -midvel[0] / (rmrn[0] + midpos[2]),-midvel[1] * tan(midpos[0]) / (rmrn[1] + midpos[2]);
重新计算 k 时刻到 k-1 时刻 n 系旋转矢量:
ω i n n = ω i e n + ω e n n {\omega}_{i n}^{n}={\omega}_{i e}^{n}+{\omega}_{e n}^{n} ωinn=ωien+ωenn
ζ n ( k − 1 ) n ( k ) ≈ ω i n n ∣ t = t k − 1 / 2 Δ t k \left.\boldsymbol{\zeta}_{n(k-1) n(k)} \approx \boldsymbol{\omega}_{i n}^{n}\right|_{t=t_{k-1 / 2}} \Delta t_{k} ζn(k−1)n(k)≈ωinn t=tk−1/2Δtk
// 重新计算 k时刻到k-1时刻 n系旋转矢量
// recompute n-frame rotation vector (n(k) with respect to n(k-1)-frame)
temp1 = (wie_n + wen_n) * imucur.dt;
qnn = Rotation::rotvec2quaternion(temp1);
e 系转动等效旋转矢量 (k-1时刻k时刻,所以取负号),直接就是地球自转角速率乘以时间差:
// e系转动等效旋转矢量 (k-1时刻k时刻,所以取负号)
// e-frame rotation vector (e(k-1) with respect to e(k)-frame)
temp2 << 0, 0, -WGS84_WIE * imucur.dt;
qee = Rotation::rotvec2quaternion(temp2);
由先前时刻位置,调用 qne(),得到先前n系到e系旋转四元数:
qne = Earth::qne(pvapre.pos);
当前时刻n系到e系旋转四元数 = 两时刻e系旋转四元数 * 先前n系到e系旋转四元数 * 两时刻n系旋转四元数:
qne = qee * qne * qnn;
当前时刻高程 = 先前高程 - 高程方向速度 * 采样间隔(因为北东地,计算出的速度时地向的,所以减):
pvacur.pos[2] = pvapre.pos[2] - midvel[2] * imucur.dt;
调用 blh() 根据 n 系到 e 系旋转四元数计算经纬度:
pvacur.pos = Earth::blh(qne, pvacur.pos[2]);
6、attUpdate():姿态更新

先定义解算过程中涉及的中间变量:
Eigen::Quaterniond qne_pre, qne_cur, qne_mid, qnn, qbb;
Eigen::Vector3d temp1, midpos, midvel;
重新计算中间时刻的速度和位置,中间速度是两时刻平均、中间位置相对于是作了一次位置更新:
- 根据两时刻速度,计算平均速度
midvel - 根据上一时刻位置计算n系到e系转换四元数
qne_pre - 根据当前时刻位置计算n系到e系转换四元数
qne_cur - 根据两时刻转换四元数,计算n系到e系平均转换四元数
qne_mid(注意得通过等效旋转矢量,并非直接插值) - 计算当前中间时刻位置
midpos
// 重新计算中间时刻的速度和位置
// recompute velocity and position at k-1/2
midvel = (pvapre.vel + pvacur.vel) / 2;
qne_pre = Earth::qne(pvapre.pos);
qne_cur = Earth::qne(pvacur.pos);
temp1 = Rotation::quaternion2vector(qne_cur.inverse() * qne_pre);
qne_mid = qne_pre * Rotation::rotvec2quaternion(temp1 / 2).inverse();
midpos[2] = (pvacur.pos[2] + pvapre.pos[2]) / 2;
midpos = Earth::blh(qne_mid, midpos[2]);
重新计算中间时刻地理参数:
// 重新计算中间时刻地理参数
// recompute rmrn, wie_n, wen_n at k-1/2
Eigen::Vector2d rmrn;
Eigen::Vector3d wie_n, wen_n;
rmrn = Earth::meridianPrimeVerticalRadius(midpos[0]);
wie_n << WGS84_WIE * cos(midpos[0]), 0, -WGS84_WIE * sin(midpos[0]);
wen_n << midvel[1] / (rmrn[1] + midpos[2]), -midvel[0] / (rmrn[0] + midpos[2]),-midvel[1] * tan(midpos[0]) / (rmrn[1] + midpos[2]);
计算 n 系的旋转四元数 k-1 时刻到 k 时刻系旋转:
ω i n n = ω i e n + ω e n n {\omega}_{i n}^{n}={\omega}_{i e}^{n}+{\omega}_{e n}^{n} ωinn=ωien+ωenn
ζ n ( k − 1 ) n ( k ) ≈ ω i n n ∣ t = t k − 1 / 2 Δ t k \left.\boldsymbol{\zeta}_{n(k-1) n(k)} \approx \boldsymbol{\omega}_{i n}^{n}\right|_{t=t_{k-1 / 2}} \Delta t_{k} ζn(k−1)n(k)≈ωinn t=tk−1/2Δtk
// 重新计算 k时刻到k-1时刻 n系旋转矢量
// recompute n-frame rotation vector (n(k) with respect to n(k-1)-frame)
temp1 = (wie_n + wen_n) * imucur.dt;
qnn = Rotation::rotvec2quaternion(temp1);
计算 b 系旋转四元数补偿二阶圆锥误差:
q b k b k − 1 ← ϕ k = Δ θ k + 1 12 Δ θ k − 1 × Δ θ k \boldsymbol{q}_{b_{k}}^{b_{k-1}} \leftarrow \boldsymbol{\phi}_{k}=\Delta \boldsymbol{\theta}_{k}+\frac{1}{12} \Delta \boldsymbol{\theta}_{k-1} \times \Delta \boldsymbol{\theta}_{k} qbkbk−1←ϕk=Δθk+121Δθk−1×Δθk
// 计算b系旋转四元数 补偿二阶圆锥误差
// b-frame rotation vector (b(k) with respect to b(k-1)-frame)
// compensate the second-order coning correction term.
temp1 = imucur.dtheta + imupre.dtheta.cross(imucur.dtheta) / 12;
qbb = Rotation::rotvec2quaternion(temp1);
两时刻n系的旋转四元数 * 上一时刻姿态四元数 * 两时刻b系旋转四元数得到当前姿态:
q b k n k = q n k − 1 n k q b k − 1 n k − 1 q b k b k − 1 \boldsymbol{q}_{b_{k}}^{n_{k}}=\boldsymbol{q}_{n_{k-1}}^{n_{k}} \boldsymbol{q}_{b_{k-1}}^{n_{k-1}} \boldsymbol{q}_{b_{k}}^{b_{k-1}} qbknk=qnk−1nkqbk−1nk−1qbkbk−1
// 姿态更新完成
// attitude update finish
pvacur.att.qbn = qnn * pvapre.att.qbn * qbb;
pvacur.att.cbn = Rotation::quaternion2matrix(pvacur.att.qbn);
pvacur.att.euler = Rotation::matrix2euler(pvacur.att.cbn);
7、噪声传播
在 insPropagation() 函数中,IMU状态更新之后进行。
先要构建 F 矩阵:
F = [ F r r I 3 × 3 0 0 0 0 0 F v r F v v [ ( C b n f b ) × ] 0 C b n 0 C b n diag ( f b ) F ϕ r F ϕ v − ( ω i n n × ) − C b n 0 − C b n diag ( ω i b b ) 0 0 0 0 − 1 T g b I 3 × 3 0 0 0 0 0 0 0 − 1 T a b I 3 × 3 0 0 0 0 0 0 0 − 1 T g s I 3 × 3 0 0 0 0 0 0 0 − 1 T a s I 3 × 3 ] \mathbf{F}=\left[\begin{array}{ccccccc}\mathbf{F}_{r r} & \mathbf{I}_{3 \times 3} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} \\ \mathbf{F}_{v r} & \mathbf{F}_{v v} & {\left[\left(\mathbf{C}_{b}^{n} \boldsymbol{f}^{b}\right) \times\right]} & \mathbf{0} & \mathbf{C}_{b}^{n} & \mathbf{0} & \mathbf{C}_{b}^{n} \operatorname{diag}\left(\boldsymbol{f}^{b}\right) \\ \mathbf{F}_{\phi r} & \mathbf{F}_{\phi v} & -\left(\boldsymbol{\omega}_{i n}^{n} \times\right) & -\mathbf{C}_{b}^{n} & \mathbf{0} & -\mathbf{C}_{b}^{n} \operatorname{diag}\left(\boldsymbol{\omega}_{i b}^{b}\right) & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \frac{-1}{T_{g b}} \mathbf{I}_{3 \times 3} & \mathbf{0} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \frac{-1}{T_{a b}} \mathbf{I}_{3 \times 3} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \frac{-1}{T_{g s}} \mathbf{I}_{3 \times 3} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \frac{-1}{T_{a s}} \mathbf{I}_{3 \times 3}\end{array}\right] F= FrrFvrFϕr0000I3×3FvvFϕv00000[(Cbnfb)×]−(ωinn×)000000−CbnTgb−1I3×30000Cbn00Tab−1I3×30000−Cbndiag(ωibb)00Tgs−1I3×300Cbndiag(fb)0000Tas−1I3×3
上面 F 矩阵每一块都是一个 3 × 3 3 \times 3 3×3 矩阵,分别表示位置、速度、姿态、陀螺仪零偏、加速度计零偏、陀螺仪比例、加速度计比力,共21维。可以很明显的看出左上角几乎是满的,因为位置、速度、姿态之间误差耦合很深;右下的器件误差很稀释,因为我们认为器件与器件之间的量测是相互独立的,处理在对角线上有元素之外,只在与器件相关的位置有元素(陀螺仪和姿态相关、加速度计和速度相关)。
定义了枚举值来索引左上角元素的下标:
enum StateID { P_ID = 0, V_ID = 3, PHI_ID = 6, BG_ID = 9, BA_ID = 12, SG_ID = 15, SA_ID = 18 };
代码排的很整齐,遵循从左往右、从上往下的顺序计算:
// 位置误差
// position error
temp.setZero();
temp(0, 0) = -pvapre_.vel[2] / rmh;
temp(0, 2) = pvapre_.vel[0] / rmh;
temp(1, 0) = pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh;
temp(1, 1) = -(pvapre_.vel[2] + pvapre_.vel[0] * tan(pvapre_.pos[0])) / rnh;
temp(1, 2) = pvapre_.vel[1] / rnh;
F.block(P_ID, P_ID, 3, 3) = temp;
F.block(P_ID, V_ID, 3, 3) = Eigen::Matrix3d::Identity();// 速度误差
// velocity error
temp.setZero();
temp(0, 0) = -2 * pvapre_.vel[1] * WGS84_WIE * cos(pvapre_.pos[0]) / rmh -pow(pvapre_.vel[1], 2) / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(0, 2) = pvapre_.vel[0] * pvapre_.vel[2] / rmh / rmh - pow(pvapre_.vel[1], 2) * tan(pvapre_.pos[0]) / rnh / rnh;
temp(1, 0) = 2 * WGS84_WIE * (pvapre_.vel[0] * cos(pvapre_.pos[0]) - pvapre_.vel[2] * sin(pvapre_.pos[0])) / rmh +pvapre_.vel[0] * pvapre_.vel[1] / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(1, 2) = (pvapre_.vel[1] * pvapre_.vel[2] + pvapre_.vel[0] * pvapre_.vel[1] * tan(pvapre_.pos[0])) / rnh / rnh;
temp(2, 0) = 2 * WGS84_WIE * pvapre_.vel[1] * sin(pvapre_.pos[0]) / rmh;
temp(2, 2) = -pow(pvapre_.vel[1], 2) / rnh / rnh - pow(pvapre_.vel[0], 2) / rmh / rmh +2 * gravity / (sqrt(rmrn[0] * rmrn[1]) + pvapre_.pos[2]);
F.block(V_ID, P_ID, 3, 3) = temp;
temp.setZero();
temp(0, 0) = pvapre_.vel[2] / rmh;
temp(0, 1) = -2 * (WGS84_WIE * sin(pvapre_.pos[0]) + pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh);
temp(0, 2) = pvapre_.vel[0] / rmh;
temp(1, 0) = 2 * WGS84_WIE * sin(pvapre_.pos[0]) + pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh;
temp(1, 1) = (pvapre_.vel[2] + pvapre_.vel[0] * tan(pvapre_.pos[0])) / rnh;
temp(1, 2) = 2 * WGS84_WIE * cos(pvapre_.pos[0]) + pvapre_.vel[1] / rnh;
temp(2, 0) = -2 * pvapre_.vel[0] / rmh;
temp(2, 1) = -2 * (WGS84_WIE * cos(pvapre_.pos(0)) + pvapre_.vel[1] / rnh);
F.block(V_ID, V_ID, 3, 3) = temp;
F.block(V_ID, PHI_ID, 3, 3) = Rotation::skewSymmetric(pvapre_.att.cbn * accel);
F.block(V_ID, BA_ID, 3, 3) = pvapre_.att.cbn;
F.block(V_ID, SA_ID, 3, 3) = pvapre_.att.cbn * (accel.asDiagonal());// 姿态误差
// attitude error
temp.setZero();
temp(0, 0) = -WGS84_WIE * sin(pvapre_.pos[0]) / rmh;
temp(0, 2) = pvapre_.vel[1] / rnh / rnh;
temp(1, 2) = -pvapre_.vel[0] / rmh / rmh;
temp(2, 0) = -WGS84_WIE * cos(pvapre_.pos[0]) / rmh - pvapre_.vel[1] / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(2, 2) = -pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh / rnh;
F.block(PHI_ID, P_ID, 3, 3) = temp;
temp.setZero();
temp(0, 1) = 1 / rnh;
temp(1, 0) = -1 / rmh;
temp(2, 1) = -tan(pvapre_.pos[0]) / rnh;
F.block(PHI_ID, V_ID, 3, 3) = temp;
F.block(PHI_ID, PHI_ID, 3, 3) = -Rotation::skewSymmetric(wie_n + wen_n);
F.block(PHI_ID, BG_ID, 3, 3) = -pvapre_.att.cbn;
F.block(PHI_ID, SG_ID, 3, 3) = -pvapre_.att.cbn * (omega.asDiagonal());// IMU零偏误差和比例因子误差,建模成一阶高斯-马尔科夫过程
// imu bias error and scale error, modeled as the first-order Gauss-Markov process
F.block(BG_ID, BG_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(BA_ID, BA_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(SG_ID, SG_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(SA_ID, SA_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
其中:
F r r = [ − v D R M + h 0 v N R M + h v E tan φ R N + h − v D + v N tan φ R N + h v E R N + h 0 0 0 ] \mathbf{F}_{r r}=\left[\begin{array}{ccc}-\frac{v_{D}}{R_{M}+h} & 0 & \frac{v_{N}}{R_{M}+h} \\ \frac{v_{E} \tan \varphi}{R_{N}+h} & -\frac{v_{D}+v_{N} \tan \varphi}{R_{N}+h} & \frac{v_{E}}{R_{N}+h} \\ 0 & 0 & 0\end{array}\right] Frr= −RM+hvDRN+hvEtanφ00−RN+hvD+vNtanφ0RM+hvNRN+hvE0
temp.setZero();
temp(0, 0) = -pvapre_.vel[2] / rmh;
temp(0, 2) = pvapre_.vel[0] / rmh;
temp(1, 0) = pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh;
temp(1, 1) = -(pvapre_.vel[2] + pvapre_.vel[0] * tan(pvapre_.pos[0])) / rnh;
temp(1, 2) = pvapre_.vel[1] / rnh;
F.block(P_ID, P_ID, 3, 3) = temp;
F v r = [ − 2 v E ω e cos φ R M + h − v E 2 sec 2 φ ( R M + h ) ( R N + h ) 0 v N v D ( R M + h ) 2 − v E 2 tan φ ( R N + h ) 2 2 ω e ( v N cos φ − v D sin φ ) R M + h + v N v E sec 2 φ ( R M + h ) ( R N + h ) 0 v E v D + v N v E tan φ ( R N + h ) 2 2 ω e v E sin φ R M + h 0 − v E 2 ( R N + h ) 2 − v N 2 ( R M + h ) 2 + 2 g p R M R N + h ] \mathbf{F}_{v r}=\left[\begin{array}{ccc}\frac{-2 v_{E} \omega_{e} \cos \varphi}{R_{M}+h}-\frac{v_{E}^{2} \sec ^{2} \varphi}{\left(R_{M}+h\right)\left(R_{N}+h\right)} & 0 & \frac{v_{N} v_{D}}{\left(R_{M}+h\right)^{2}}-\frac{v_{E}^{2} \tan \varphi}{\left(R_{N}+h\right)^{2}} \\ \frac{2 \omega_{e}\left(v_{N} \cos \varphi-v_{D} \sin \varphi\right)}{R_{M}+h}+\frac{v_{N} v_{E} \sec ^{2} \varphi}{\left(R_{M}+h\right)\left(R_{N}+h\right)} & 0 & \frac{v_{E} v_{D}+v_{N} v_{E} \tan \varphi}{\left(R_{N}+h\right)^{2}} \\ \frac{2 \omega_{e} v_{E} \sin \varphi}{R_{M}+h} & 0 & -\frac{v_{E}^{2}}{\left(R_{N}+h\right)^{2}}-\frac{v_{N}^{2}}{\left(R_{M}+h\right)^{2}}+\frac{2 g_{p}}{\sqrt{R_{M} R_{N}+h}}\end{array}\right] Fvr= RM+h−2vEωecosφ−(RM+h)(RN+h)vE2sec2φRM+h2ωe(vNcosφ−vDsinφ)+(RM+h)(RN+h)vNvEsec2φRM+h2ωevEsinφ000(RM+h)2vNvD−(RN+h)2vE2tanφ(RN+h)2vEvD+vNvEtanφ−(RN+h)2vE2−(RM+h)2vN2+RMRN+h2gp
temp.setZero();
temp(0, 0) = -2 * pvapre_.vel[1] * WGS84_WIE * cos(pvapre_.pos[0]) / rmh -pow(pvapre_.vel[1], 2) / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(0, 2) = pvapre_.vel[0] * pvapre_.vel[2] / rmh / rmh - pow(pvapre_.vel[1], 2) * tan(pvapre_.pos[0]) / rnh / rnh;
temp(1, 0) = 2 * WGS84_WIE * (pvapre_.vel[0] * cos(pvapre_.pos[0]) - pvapre_.vel[2] * sin(pvapre_.pos[0])) / rmh +pvapre_.vel[0] * pvapre_.vel[1] / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(1, 2) = (pvapre_.vel[1] * pvapre_.vel[2] + pvapre_.vel[0] * pvapre_.vel[1] * tan(pvapre_.pos[0])) / rnh / rnh;
temp(2, 0) = 2 * WGS84_WIE * pvapre_.vel[1] * sin(pvapre_.pos[0]) / rmh;
temp(2, 2) = -pow(pvapre_.vel[1], 2) / rnh / rnh - pow(pvapre_.vel[0], 2) / rmh / rmh +2 * gravity / (sqrt(rmrn[0] * rmrn[1]) + pvapre_.pos[2]);
F.block(V_ID, P_ID, 3, 3) = temp;
F v v = [ v D R M + h − 2 ( ω e sin φ + v E tan φ R N + h ) v N R M + h 2 ω e sin φ + v E tan φ R N + h v D + v N tan φ R N + h 2 ω e cos φ + v E R N + h − 2 v N R M + h − 2 ( ω e cos φ + v E R N + h ) 0 ] \mathbf{F}_{v v}=\left[\begin{array}{ccc}\frac{v_{D}}{R_{M}+h} & -2\left(\omega_{e} \sin \varphi+\frac{v_{E} \tan \varphi}{R_{N}+h}\right) & \frac{v_{N}}{R_{M}+h} \\ 2 \omega_{e} \sin \varphi+\frac{v_{E} \tan \varphi}{R_{N}+h} & \frac{v_{D}+v_{N} \tan \varphi}{R_{N}+h} & 2 \omega_{e} \cos \varphi+\frac{v_{E}}{R_{N}+h} \\ -\frac{2 v_{N}}{R_{M}+h} & -2\left(\omega_{e} \cos \varphi+\frac{v_{E}}{R_{N}+h}\right) & 0\end{array}\right] Fvv= RM+hvD2ωesinφ+RN+hvEtanφ−RM+h2vN−2(ωesinφ+RN+hvEtanφ)RN+hvD+vNtanφ−2(ωecosφ+RN+hvE)RM+hvN2ωecosφ+RN+hvE0
temp.setZero();
temp(0, 0) = pvapre_.vel[2] / rmh;
temp(0, 1) = -2 * (WGS84_WIE * sin(pvapre_.pos[0]) + pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh);
temp(0, 2) = pvapre_.vel[0] / rmh;
temp(1, 0) = 2 * WGS84_WIE * sin(pvapre_.pos[0]) + pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh;
temp(1, 1) = (pvapre_.vel[2] + pvapre_.vel[0] * tan(pvapre_.pos[0])) / rnh;
temp(1, 2) = 2 * WGS84_WIE * cos(pvapre_.pos[0]) + pvapre_.vel[1] / rnh;
temp(2, 0) = -2 * pvapre_.vel[0] / rmh;
temp(2, 1) = -2 * (WGS84_WIE * cos(pvapre_.pos(0)) + pvapre_.vel[1] / rnh);
F.block(V_ID, V_ID, 3, 3) = temp;
F ϕ r = [ − ω e sin φ R M + h 0 v E ( R N + h ) 2 0 0 − v N ( R M + h ) 2 − ω e cos φ R M + h − v E sec 2 φ ( R M + h ) ( R N + h ) 0 − v E tan φ ( R N + h ) 2 ] \mathbf{F}_{\phi r}=\left[\begin{array}{ccc}-\frac{\omega_{e} \sin \varphi}{R_{M}+h} & 0 & \frac{v_{E}}{\left(R_{N}+h\right)^{2}} \\ 0 & 0 & -\frac{v_{N}}{\left(R_{M}+h\right)^{2}} \\ -\frac{\omega_{e} \cos \varphi}{R_{M}+h}-\frac{v_{E} \sec ^{2} \varphi}{\left(R_{M}+h\right)\left(R_{N}+h\right)} & 0 & -\frac{v_{E} \tan \varphi}{\left(R_{N}+h\right)^{2}}\end{array}\right] Fϕr= −RM+hωesinφ0−RM+hωecosφ−(RM+h)(RN+h)vEsec2φ000(RN+h)2vE−(RM+h)2vN−(RN+h)2vEtanφ
temp.setZero();
temp(0, 0) = -WGS84_WIE * sin(pvapre_.pos[0]) / rmh;
temp(0, 2) = pvapre_.vel[1] / rnh / rnh;
temp(1, 2) = -pvapre_.vel[0] / rmh / rmh;
temp(2, 0) = -WGS84_WIE * cos(pvapre_.pos[0]) / rmh - pvapre_.vel[1] / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(2, 2) = -pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh / rnh;
F.block(PHI_ID, P_ID, 3, 3) = temp;
F ϕ v = [ 0 1 R N + h 0 − 1 R M + h 0 0 0 − tan φ R N + h 0 ] \mathbf{F}_{\phi v}=\left[\begin{array}{ccc}0 & \frac{1}{R_{N}+h} & 0 \\ -\frac{1}{R_{M}+h} & 0 & 0 \\ 0 & -\frac{\tan \varphi}{R_{N}+h} & 0\end{array}\right] Fϕv= 0−RM+h10RN+h10−RN+htanφ000
temp.setZero();
temp(0, 1) = 1 / rnh;
temp(1, 0) = -1 / rmh;
temp(2, 1) = -tan(pvapre_.pos[0]) / rnh;
F.block(PHI_ID, V_ID, 3, 3) = temp;
IMU零偏误差和比例因子误差,建模成一阶高斯-马尔科夫过程,:
− 1 T g s I 3 × 3 \frac{-1}{T_{g s}} \mathbf{I}_{3 \times 3} Tgs−1I3×3
// IMU零偏误差和比例因子误差,建模成一阶高斯-马尔科夫过程
// imu bias error and scale error, modeled as the first-order Gauss-Markov process
F.block(BG_ID, BG_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(BA_ID, BA_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(SG_ID, SG_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(SA_ID, SA_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
然后构建系统噪声驱动矩阵:
G 18 21 × 18 = [ 0 0 0 0 0 0 C b n 0 0 0 0 0 0 C b n 0 0 0 0 0 0 I 3 × 3 0 0 0 0 0 0 I 3 × 3 0 0 0 0 0 0 I 3 × 3 0 0 0 0 0 0 I 3 × 3 ] \underset{21 \times 18}{\mathbf{G}_{18}}=\left[\begin{array}{cccccc}\mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} \\ \mathbf{C}_{b}^{n} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{C}_{b}^{n} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{I}_{3 \times 3} & \mathbf{0} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I}_{3 \times 3} & \mathbf{0} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I}_{3 \times 3} & \mathbf{0} \\ \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{0} & \mathbf{I}_{3 \times 3}\end{array}\right] 21×18G18= 0Cbn0000000Cbn0000000I3×30000000I3×30000000I3×30000000I3×3
// 系统噪声驱动矩阵
// system noise driven matrix
G.block(V_ID, VRW_ID, 3, 3) = pvapre_.att.cbn;
G.block(PHI_ID, ARW_ID, 3, 3) = pvapre_.att.cbn;
G.block(BG_ID, BGSTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
G.block(BA_ID, BASTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
G.block(SG_ID, SGSTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
G.block(SA_ID, SASTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
系统传播噪声的状态转移矩阵:
Φ k / k − 1 = I + F k − 1 Δ t k \boldsymbol{\Phi}_{k / k-1}=\boldsymbol{I}+\boldsymbol{F}_{k-1} \Delta t_{k} Φk/k−1=I+Fk−1Δtk
// 状态转移矩阵
// compute the state transition matrix
Phi.setIdentity();
Phi = Phi + F * imucur.dt;
系统传播噪声:
Q k = ( Φ k / k − 1 G k − 1 q k − 1 G k − 1 T Φ k / k − 1 T + G k q k G k T ) Δ t k / 2 \boldsymbol{Q}_{k}=\left(\begin{array}{c}\boldsymbol{\Phi}_{k / k-1} \boldsymbol{G}_{k-1} \boldsymbol{q}_{k-1} \boldsymbol{G}_{k-1}^{T} \boldsymbol{\Phi}_{k / k-1}^{T} \\ +\boldsymbol{G}_{k} \boldsymbol{q}_{k} \boldsymbol{G}_{k}^{T}\end{array}\right) \Delta t_{k} / 2 Qk=(Φk/k−1Gk−1qk−1Gk−1TΦk/k−1T+GkqkGkT)Δtk/2
// 计算系统传播噪声
// compute system propagation noise
Qd = G * Qc_ * G.transpose() * imucur.dt;
Qd = (Phi * Qd * Phi.transpose() + Qd) / 2;
EKF 预测传播系统协方差和系统误差状态:
x k / k − 1 = Φ k / k − 1 x k − 1 P k / k − 1 = Φ k / k − 1 P k − 1 Φ k / k − 1 T + Q k \begin{aligned} \boldsymbol{x}_{k / k-1} & =\boldsymbol{\Phi}_{k / k-1} \boldsymbol{x}_{k-1} \\ \boldsymbol{P}_{k / k-1} & =\boldsymbol{\Phi}_{k / k-1} \boldsymbol{P}_{k-1} \boldsymbol{\Phi}_{k / k-1}^{T}+\boldsymbol{Q}_{k}\end{aligned} xk/k−1Pk/k−1=Φk/k−1xk−1=Φk/k−1Pk−1Φk/k−1T+Qk
EKFPredict(Phi, Qd);
void GIEngine::EKFPredict(Eigen::MatrixXd &Phi, Eigen::MatrixXd &Qd) {assert(Phi.rows() == Cov_.rows());assert(Qd.rows() == Cov_.rows());// 传播系统协方差和误差状态// propagate system covariance and error stateCov_ = Phi * Cov_ * Phi.transpose() + Qd;dx_ = Phi * dx_;
}
八、GNSS 量测更新、系统状态反馈
1、gnssUpdate():GNSS 量测更新
先将 IMU 位置 pvacur_.pos 转到 GNSS 天线相位中心位置 antenna_pos:
r ^ G = r ^ I + D R − 1 C ^ b n l b \hat{\boldsymbol{r}}_{G}=\hat{\boldsymbol{r}}_{I}+\boldsymbol{D}_{R}^{-1} \hat{\boldsymbol{C}}_{b}^{n} \boldsymbol{l}^{b} r^G=r^I+DR−1C^bnlb
// IMU位置转到GNSS天线相位中心位置
// convert IMU position to GNSS antenna phase center position
Eigen::Vector3d antenna_pos;
Eigen::Matrix3d Dr, Dr_inv;
Dr_inv = Earth::DRi(pvacur_.pos);
Dr = Earth::DR(pvacur_.pos);
antenna_pos = pvacur_.pos + Dr_inv * pvacur_.att.cbn * options_.antlever;
计算位置观测向量:IMU 预测天线位置减去 GNSS 观测位置:
z r = D R ( r ^ G − r ~ G ) \boldsymbol{z}_{r}=\boldsymbol{D}_{R}\left(\hat{\boldsymbol{r}}_{G}-\tilde{\boldsymbol{r}}_{G}\right) zr=DR(r^G−r~G)
// GNSS位置测量新息
// compute GNSS position innovation
Eigen::MatrixXd dz;
dz = Dr * (antenna_pos - gnssdata.blh);
构造 GNSS 位置观测矩阵:
H r = [ I 3 0 3 ( C b n l b ) × 0 3 0 3 0 3 0 3 ] \boldsymbol{H}_{r}=\left[\begin{array}{lllllll}\boldsymbol{I}_{3} & 0_{3} & \left(\boldsymbol{C}_{b}^{n} \boldsymbol{l}^{b}\right) \times & 0_{3} & 0_{3} & 0_{3} & 0_{3}\end{array}\right] Hr=[I303(Cbnlb)×03030303]
// 构造GNSS位置观测矩阵
// construct GNSS position measurement matrix
Eigen::MatrixXd H_gnsspos;
H_gnsspos.resize(3, Cov_.rows());
H_gnsspos.setZero();
H_gnsspos.block(0, P_ID, 3, 3) = Eigen::Matrix3d::Identity();
H_gnsspos.block(0, PHI_ID, 3, 3) = Rotation::skewSymmetric(pvacur_.att.cbn * options_.antlever);
位置观测噪声阵,就是用数据文件中读取到的 GNSS 位置标准差平方得到协方差,组成成协方差阵:
// 位置观测噪声阵
// construct measurement noise matrix
Eigen::MatrixXd R_gnsspos;
R_gnsspos = gnssdata.std.cwiseProduct(gnssdata.std).asDiagonal();
得到观测向量z,观测矩阵H, 观测噪声矩阵R后,调用 EKFUpdate(),量测更新:
EKFUpdate(dz, H_gnsspos, R_gnsspos);
最后,GNSS更新之后设置为不可用:
gnssdata.isvalid = false;
2、EKFUpdate():EKF 更新协方差和误差状态
判断矩阵维度是否合理,不合理直接退出程序:
assert(H.cols() == Cov_.rows());
assert(dz.rows() == H.rows());
assert(dz.rows() == R.rows());
assert(dz.cols() == 1);
计算 Kalman 滤波增益系数 K:
K k = P k / k − 1 H k T ( H k P k / k − 1 H k T + R k ) − 1 \boldsymbol{K}_{k}=\boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{T}\left(\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{T}+\boldsymbol{R}_{k}\right)^{-1} Kk=Pk/k−1HkT(HkPk/k−1HkT+Rk)−1
// 计算Kalman增益
// Compute Kalman Gain
auto temp = H * Cov_ * H.transpose() + R;
Eigen::MatrixXd K = Cov_ * H.transpose() * temp.inverse();
更新系统误差状态和协方差:
P k = ( I − K k H k ) P k / k − 1 ( I − K k H k ) T + K k R k K k T K k = P k / k − 1 H k T ( H k P k / k − 1 H k T + R k ) − 1 \begin{array}{l}\boldsymbol{P}_{k}=\left(\boldsymbol{I}-\boldsymbol{K}_{k} \boldsymbol{H}_{k}\right) \boldsymbol{P}_{k / k-1}\left(\boldsymbol{I}-\boldsymbol{K}_{k} \boldsymbol{H}_{k}\right)^{T}+\boldsymbol{K}_{k} \boldsymbol{R}_{k} \boldsymbol{K}_{k}^{T} \\ \boldsymbol{K}_{k}=\boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{T}\left(\boldsymbol{H}_{k} \boldsymbol{P}_{k / k-1} \boldsymbol{H}_{k}^{T}+\boldsymbol{R}_{k}\right)^{-1}\end{array} Pk=(I−KkHk)Pk/k−1(I−KkHk)T+KkRkKkTKk=Pk/k−1HkT(HkPk/k−1HkT+Rk)−1
// 更新系统误差状态和协方差
// update system error state and covariance
Eigen::MatrixXd I;
I.resizeLike(Cov_);
I.setIdentity();
I = I - K * H;
// 如果每次更新后都进行状态反馈,则更新前dx_一直为0,下式可以简化为:dx_ = K * dz;
// if state feedback is performed after every update, dx_ is always zero before the update
// the following formula can be simplified as : dx_ = K * dz;
dx_ = dx_ + K * (dz - H * dx_);
Cov_ = I * Cov_ * I.transpose() + K * R * K.transpose();
3、stateFeedback():状态反馈
想清楚卡尔曼滤波到底算的是什么,考虑到底是加还是减。零偏、比例因子残差是加、速度位置残差是减,反馈之后误差状态置 0:
void GIEngine::stateFeedback() {Eigen::Vector3d vectemp;// 位置误差反馈// posisiton error feedbackEigen::Vector3d delta_r = dx_.block(P_ID, 0, 3, 1);Eigen::Matrix3d Dr_inv = Earth::DRi(pvacur_.pos);pvacur_.pos -= Dr_inv * delta_r;// 速度误差反馈// velocity error feedbackvectemp = dx_.block(V_ID, 0, 3, 1);pvacur_.vel -= vectemp;// 姿态误差反馈// attitude error feedbackvectemp = dx_.block(PHI_ID, 0, 3, 1);Eigen::Quaterniond qpn = Rotation::rotvec2quaternion(vectemp);pvacur_.att.qbn = qpn * pvacur_.att.qbn;pvacur_.att.cbn = Rotation::quaternion2matrix(pvacur_.att.qbn);pvacur_.att.euler = Rotation::matrix2euler(pvacur_.att.cbn);// IMU零偏误差反馈// IMU bias error feedbackvectemp = dx_.block(BG_ID, 0, 3, 1);imuerror_.gyrbias += vectemp;vectemp = dx_.block(BA_ID, 0, 3, 1);imuerror_.accbias += vectemp;// IMU比例因子误差反馈// IMU sacle error feedbackvectemp = dx_.block(SG_ID, 0, 3, 1);imuerror_.gyrscale += vectemp;vectemp = dx_.block(SA_ID, 0, 3, 1);imuerror_.accscale += vectemp;// 误差状态反馈到系统状态后,将误差状态清零// set 'dx' to zero after feedback error state to system statedx_.setZero();
}
九、KF-GINS常见问题
复制自PPT
KF-GINS能够达到怎么样的定位精度?
组合导航算法精度更受IMU等级、以及测试时GNSS定位质量影响。组合导航算法相对成熟,对于同样的设备只要算法正确实现,算法几乎不会对定位精度产生较大影响。
初始导航状态和初始导航状态标准差如何给定?
-
初始位置(和速度)可由GNSS给定,初始姿态(和速度)可从参考结果中获取;
-
位置速度标准差可由GNSS给定,姿态标准差可给经验值,车载领域一般横滚俯仰小,航向大一些
IMU数据输入到程序之前,需要扣除重力加速度吗?
不需要,惯性导航算法中补偿了重力加速度
INS机械编排中旋转效应等补偿项,对于低端IMU是否需要补偿?
低端IMU测量噪声更大,简化的IMU积分算法对低端IMU精度产生的影响较小
组合导航中GNSS信号丢失期间进行纯惯导解算,这时IMU误差项可以补偿吗?
GNSS丢失期间IMU误差项不更新,但是可以利用之前估计的IMU误差项继续补偿
IMU数据,如何从速率形式转到增量形式?
一般采用更高频率速率数据积分得到增量数据,参考:新手入门系列4——MEMS IMU原始数
据采集和时间同步的那些坑(i2Nav网站)
IMU零偏和比例因子建模时相关时间如何给定?
建模为一阶高斯-马尔可夫过程,实际中一般根据经验设置相关时间,MEMS设置1h
GNSS/INS组合导航中是否需要考虑惯性系和车体系的转换?
不需要,GNSS/INS组合导航不受载体限制,不需要考虑车体系
初始化拓展
-
动态初始对准,GNSS位置差分速度(或者GNSS直接输出速度),位置差分计算初始航向
-
快速航向初始化 ,轨迹匹配方法快速获取准确初始航向
-
静态粗对准,适用于高精度惯导,双矢量法找到初始姿态
观测信息拓展
-
直接构建观测向量、观测模型和噪声矩阵,调用EKFUpdate更新和stateFeedback反馈
-
GNSS速度观测信息、NHC约束信息(对于车载)、零速信息修正
状态信息拓展
- 如果需要增广系统状态(如里程计增广比例因子[2]),则修改RANK(NOISERANK),添加StateID, NoiseID
- 协方差、状态转移矩阵、观测信息对应修改;添加观测信息,进行更新反馈
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!