[Modern Robotics] 2 -旋转与角速度
Modern Robotics
- 旋转矩阵
- 旋转矩阵与特殊正交群
- 旋转矩阵的性质
- 旋转矩阵的使用
- 角速度
- 旋转的指数坐标表示
- 线性微分方程的一些必要结论
- 旋转的指数坐标
- 旋转的矩阵对数
旋转矩阵
旋转矩阵与特殊正交群
在上篇文章中说过,旋转矩阵 R R R 的9个变量中,只有3个是独立的,这说明矩阵有6个显式的约束。如下条件应满足:
(a) 坐标系的轴 x b ^ , y b ^ , z b ^ \hat{x_b}, \hat{y_b}, \hat{z_b} xb^,yb^,zb^ 应为单位向量:
(3.17) r 11 2 + r 21 2 + r 31 2 = 1 r 12 2 + r 22 2 + r 32 2 = 1 r 13 2 + r 23 2 + r 33 2 = 1 r_{11}^2 + r_{21}^2 + r_{31}^2 = 1 \\ r_{12}^2 + r_{22}^2 + r_{32}^2 = 1 \\ r_{13}^2 + r_{23}^2 + r_{33}^2 = 1 \tag{3.17} r112+r212+r312=1r122+r222+r322=1r132+r232+r332=1(3.17)
(b) 三个坐标轴互相垂直:
(3.18) r 11 r 12 + r 21 r 22 + r 31 r 32 = 0 r 12 r 13 + r 22 r 23 + r 32 r 33 = 0 r 11 r 13 + r 21 r 23 + r 31 r 33 = 0 r_{11}r_{12} + r_{21}r_{22} + r_{31}r_{32} = 0 \\ r_{12}r_{13} + r_{22}r_{23} + r_{32}r_{33} = 0 \\ r_{11}r_{13} + r_{21}r_{23} + r_{31}r_{33} = 0 \tag{3.18} r11r12+r21r22+r31r32=0r12r13+r22r23+r32r33=0r11r13+r21r23+r31r33=0(3.18)
如上的六个约束条件可表示为:
(3.19) R T R = I R^TR = I \tag{3.19} RTR=I(3.19)
其中, R T R^T RT是矩阵转置, I I I 为单位阵。
同样对于右手旋转矩阵,还有如下性质:
(3.21) d e t R = 1 det R = 1 \tag{3.21} detR=1(3.21)
所有的 3 × 3 3 \times 3 3×3 实数矩阵组成了特殊正交群 S O ( 3 ) SO(3) SO(3),定义如下:满足
(i) R T R = I R^TR = I RTR=I
(ii) d e t R = 1 det R = 1 detR=1
类似的也有特殊正交群 S O ( 2 ) SO(2) SO(2),对于 R ∈ S O ( 2 ) R \in SO(2) R∈SO(2),有:
R = [ r 11 r 12 r 21 r 22 ] = [ c o s θ − s i n θ s i n θ c o s θ ] . R = \left[ \begin{matrix} r_{11} & r_{12} \\ r_{21} & r_{22} \end{matrix} \right] = \left[ \begin{matrix} cos\theta & -sin\theta \\ sin\theta & cos\theta \end{matrix} \right]. R=[r11r21r12r22]=[cosθsinθ−sinθcosθ].
其中 θ ∈ [ 0 , 2 π ) \theta \in [0, 2\pi) θ∈[0,2π)。 S O ( 2 ) SO(2) SO(2)的元素代表的是平面方向, S O ( 3 ) SO(3) SO(3)的元素表示的是空间方向。
旋转矩阵的性质
S O ( 2 ) SO(2) SO(2) 与 S O ( 3 ) SO(3) SO(3) 之所以称之为群,是因为他们满足数学上对群的如下定义要求:
(1) 封闭性: A B AB AB 也属于群。
(2) 结合律: ( A B ) C = A ( B C ) (AB)C = A(BC) (AB)C=A(BC)
(3) 幺元: 存在单位阵,使 A I = I A = A AI = IA = A AI=IA=A
(4) 逆: 群存在 A − 1 A^{-1} A−1,使得 A A − 1 = A − 1 A = I AA^{-1} = A^{-1}A = I AA−1=A−1A=I
并且有如下性质:
(1) 对于任意 R ∈ S O ( 3 ) R \in SO(3) R∈SO(3),它的逆 R − 1 R^{-1} R−1 也是旋转矩阵,且有 R − 1 = R T R^{-1} = R^T R−1=RT。
(2) 两个旋转矩阵的乘积仍然是旋转矩阵。
(3) 旋转矩阵相乘满足结合律,不满足交换律。
(4) 对于任意向量 x ∈ R 3 , R ∈ S O ( 3 ) x \in \mathbb{R}^3,R\in SO(3) x∈R3,R∈SO(3),向量 y = R x y = Rx y=Rx 与 x x x 有相同的长度或模。
旋转矩阵的使用
对于一个旋转矩阵 R R R,有三个主要用处:
(1) 描述一个方向
(2) 改变一个向量或坐标系的参考坐标系
(3) 旋转一个向量或坐标系
对于第一种情况, R R R 矩阵用来描述一个坐标系。对于第二种,第三种情况, R R R 矩阵认为是一个操作,作用于一个向量或坐标系(改变其参考坐标系或者旋转它)。

如图3.7所示, { a } \{a\} {a}, { b } \{b\} {b}, { c } \{c\} {c} 坐标系有相同的原点,图示用来说明方向。假设 { a } \{a\} {a} 坐标系与 { s } \{s\} {s} 坐标系是重合的。则此三个坐标系相对于 { s } \{s\} {s} 的方向可表示为:
R a = [ 1 0 0 0 1 0 0 0 1 ] , R b = [ 0 − 1 0 1 0 0 0 0 1 ] , R c = [ 0 − 1 0 0 0 − 1 1 0 0 ] R_a = \left[ \begin{matrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 &1 \end{matrix} \right], R_b = \left[ \begin{matrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 &1 \end{matrix} \right], R_c = \left[ \begin{matrix} 0 & -1 & 0 \\ 0 & 0 & -1 \\ 1 & 0 &0 \end{matrix} \right] Ra=⎣⎡100010001⎦⎤,Rb=⎣⎡010−100001⎦⎤,Rc=⎣⎡001−1000−10⎦⎤
对于空间一个 p p p 点,其在三个坐标系中的坐标为:
p a = [ 1 1 0 ] , p b = [ 1 − 1 0 ] , p c = [ 0 − 1 − 1 ] . p_a = \left[ \begin{matrix} 1 \\ 1 \\ 0 \end{matrix} \right], p_b = \left[ \begin{matrix} 1 \\ -1 \\ 0 \end{matrix} \right], p_c = \left[ \begin{matrix} 0 \\ -1 \\ -1 \end{matrix} \right]. pa=⎣⎡110⎦⎤,pb=⎣⎡1−10⎦⎤,pc=⎣⎡0−1−1⎦⎤.
同时注意到, { b } \{b\} {b} 是 { a } \{a\} {a} 绕着 z a ^ \hat{z_a} za^ 旋转90°得到的, { c } \{c\} {c} 是绕着 { b } \{b\} {b}坐标系的 y b ^ \hat{y_b} yb^ 旋转 -90°得到的。
(1) 描述方向
当我们描述 R c R_c Rc 时,默认的是 { c } \{c\} {c} 相对于 { s } \{s\} {s} 的方向。为突出相对性,写成 R s c R_{sc} Rsc。
例如:
R a c = [ 0 − 1 0 0 0 − 1 1 0 0 ] , R c a = [ 0 0 1 − 1 0 0 0 − 1 0 ] R_{ac} = \left[ \begin{matrix} 0 & -1 & 0 \\ 0 & 0 & -1 \\ 1 & 0 &0 \end{matrix} \right], R_{ca} = \left[ \begin{matrix} 0 & 0 & 1 \\ -1 & 0 & 0 \\ 0 & -1 &0 \end{matrix} \right] Rac=⎣⎡001−1000−10⎦⎤,Rca=⎣⎡0−1000−1100⎦⎤
简单的计算发现, R a c R c a = I R_{ac}R_{ca} = I RacRca=I,这说明 R a c = R c a − 1 R_{ac} = R_{ca}^{-1} Rac=Rca−1,又根据旋转矩阵的性质,有 R a c = R c a T R_{ac} = R_{ca}^{T} Rac=RcaT。事实上,对于任意的两个坐标系 { d } \{d\} {d}, { e } \{e\} {e},
R d e = R e d − 1 = R e d T R_{de} = R_{ed}^{-1} = R_{ed}^T Rde=Red−1=RedT
(2) 改变参考坐标系
旋转矩阵 R a b R_{ab} Rab 描述的是 { b } \{b\} {b} 坐标系在 { a } \{a\} {a}中的方向, R b c R_{bc} Rbc 描述的是 { c } \{c\} {c} 坐标系在 { b } \{b\} {b}中的方向,直接计算可得到:
(3.22) R a c = R a b R b c R_{ac} = R_{ab}R_{bc} \tag{3.22} Rac=RabRbc(3.22)
这里可以把 R a b R_{ab} Rab 看作一个数学操作,把 { c } \{c\} {c}的参考坐标系从 { b } \{b\} {b} 改为 { a } \{a\} {a}。
下标去除规则可帮助我们记住这个性质:
R a b R b c = R a b / R b / c = R a c R_{ab}R_{bc} = R_{a{b\mkern-7mu/}}R_{{b\mkern-7mu/c}} =\quad R_{ac} RabRbc=Rab/Rb/c=Rac
一个旋转矩阵是由三个单位向量组成的集合,于是一个向量的参考坐标系也可以通过旋转矩阵来改变:
R a b p b = R a b / p b / = p a R_{ab}p_{b} = R_{a{b\mkern-7mu/}}p_{{b\mkern-7mu/}} = \quad p_{a} Rabpb=Rab/pb/=pa
(3) 旋转一个向量或坐标系
图3.8展示了一个坐标系 { c } \{c\} {c},其最初与 { s } \{s\} {s} 坐标系一致。如果我们将 { c } \{c\} {c} 坐标系绕着 w ^ \hat{w} w^ 单位轴旋转 θ \theta θ 角度,得到 { c ′ } \{c'\} {c′}坐标系,其坐标轴为 x ′ ^ , y ′ ^ , z ′ ^ {\hat{x'}, \hat{y'}, \hat{z'}} x′^,y′^,z′^。旋转矩阵为 R = R s c ′ R = R_{sc'} R=Rsc′,代表了 { c ′ } \{c'\} {c′} 的原点相对于 { s } \{s\} {s} 的方向。我们换个角度,也可以认为这个旋转使得 { s } \{s\} {s}变到 { c ′ } \{c'\} {c′}。我们看待旋转矩阵的角度转变成一个操作,而不是方向了,写成:
R = R o t ( w ^ , θ ) R = Rot(\hat{w}, \theta) R=Rot(w^,θ)

典型的绕坐标轴旋转的矩阵如下:
R o t ( x ^ , θ ) = [ 1 0 0 0 c o s θ − s i n θ 0 s i n θ c o s θ ] , R o t ( y ^ , θ ) = [ c o s θ 0 s i n θ 0 1 0 − s i n θ 0 c o s θ ] , R o t ( z ^ , θ ) = [ c o s θ − s i n θ 0 s i n θ c o s θ 0 0 0 1 ] . Rot(\hat{x}, \theta) = \left[ \begin{matrix} 1 & 0 & 0 \\ 0 & cos\theta & -sin\theta \\ 0 & sin\theta &cos\theta \end{matrix} \right], Rot(\hat{y}, \theta) = \left[ \begin{matrix} cos\theta & 0 & sin\theta \\ 0 & 1 & 0 \\ -sin\theta & 0 &cos\theta \end{matrix} \right], Rot(\hat{z},\theta) = \left[ \begin{matrix} cos\theta& -sin\theta & 0 \\ sin\theta & cos\theta & 0 \\ 0 & 0 & 1 \end{matrix} \right]. Rot(x^,θ)=⎣⎡1000cosθsinθ0−sinθcosθ⎦⎤,Rot(y^,θ)=⎣⎡cosθ0−sinθ010sinθ0cosθ⎦⎤,Rot(z^,θ)=⎣⎡cosθsinθ0−sinθcosθ0001⎦⎤.
更一般的,对于 w ^ = ( w 1 ^ , w 2 ^ , w 3 ^ ) \hat{w} = (\hat{w_1}, \hat{w_2}, \hat{w_3}) w^=(w1^,w2^,w3^),有:
R o t ( w ^ , θ ) = [ c θ + w 1 ^ 2 ( 1 − c θ ) w 1 ^ w 2 ^ ( 1 − c θ ) − w 3 ^ s θ w 1 ^ w 3 ^ ( 1 − c θ ) + w 2 ^ s θ w 1 ^ w 2 ^ ( 1 − c θ ) + w 3 ^ s θ c θ + w 2 ^ 2 ( 1 − c θ ) w 2 ^ w 3 ^ ( 1 − c θ ) − w 1 ^ s θ w 1 ^ w 3 ^ ( 1 − c θ ) − w 2 ^ s θ w 2 ^ w 3 ^ ( 1 − c θ ) + w 1 ^ s θ c θ + w 3 ^ 2 ( 1 − c θ ) ] Rot(\hat{w}, \theta) = \left[ \begin{matrix} c_\theta+\hat{w_1}^2(1-c_\theta) & \hat{w_1}\hat{w_2}(1-c_\theta) - \hat{w_3}s_\theta & \hat{w_1}\hat{w_3}(1-c_\theta) + \hat{w_2}s_\theta \\ \hat{w_1}\hat{w_2}(1-c_\theta) + \hat{w_3}s_\theta & c_\theta+\hat{w_2}^2(1-c_\theta) & \hat{w_2}\hat{w_3}(1-c_\theta) - \hat{w_1}s_\theta \\ \hat{w_1}\hat{w_3}(1-c_\theta) - \hat{w_2}s_\theta & \hat{w_2}\hat{w_3}(1-c_\theta) + \hat{w_1}s_\theta & c_\theta+\hat{w_3}^2(1-c_\theta) \end{matrix} \right] Rot(w^,θ)=⎣⎡cθ+w1^2(1−cθ)w1^w2^(1−cθ)+w3^sθw1^w3^(1−cθ)−w2^sθw1^w2^(1−cθ)−w3^sθcθ+w2^2(1−cθ)w2^w3^(1−cθ)+w1^sθw1^w3^(1−cθ)+w2^sθw2^w3^(1−cθ)−w1^sθcθ+w3^2(1−cθ)⎦⎤
其中, s θ = s i n θ , c θ = c o s θ s_\theta = sin\theta, c_\theta = cos\theta sθ=sinθ,cθ=cosθ。对于任意的 R ∈ S O ( 3 ) R \in SO(3) R∈SO(3) 可以通过单位阵绕着某个 w ^ \hat{w} w^ 旋转 θ \theta θ 角度得到。并且有 R o t ( w ^ , θ ) = R o t ( − w ^ , − θ ) Rot(\hat{w},\theta) = Rot(-\hat{w}, -\theta) Rot(w^,θ)=Rot(−w^,−θ)。
现在, R s b R_{sb} Rsb 表示的是 { b } \{b\} {b} 相对于 { s } \{s\} {s} 的方向,我们想要将 { b } \{b\} {b} 绕着一个单位轴 w ^ \hat{w} w^ 旋转 θ \theta θ 角度,如 R = R o t ( w ^ , θ ) R = Rot(\hat{w}, \theta) R=Rot(w^,θ)。为了区分清楚,我们需要指定 w ^ \hat{w} w^ 是相对于 { s } \{s\} {s}的坐标还是相对于 { b } \{b\} {b}的坐标。设 { b ′ } \{b'\} {b′} 坐标系是绕 w s ^ = w ^ \hat{w_s} = \hat{w} ws^=w^ 旋转 θ \theta θ 角得到的新坐标系,且旋转轴 w ^ \hat{w} w^ 是在 { s } \{s\} {s} 坐标下。设 { b ′ ′ } \{b''\} {b′′} 是绕 w b ^ = w ^ \hat{w_b} = \hat{w} wb^=w^ 旋转 θ \theta θ 角得到的新坐标系,且旋转轴 w ^ \hat{w} w^ 是在 { b } \{b\} {b} 坐标下。则有:
R s b ′ = R R s b R s b ′ ′ = R s b R R_{sb'} = RR_{sb} \\ R_{sb''} = R_{sb}R Rsb′=RRsbRsb′′=RsbR
另外,把 R = R o t ( w ^ , θ ) R = Rot(\hat{w}, \theta) R=Rot(w^,θ) 乘在前面,产生了绕 { s } \{s\} {s} 中的 w ^ \hat{w} w^ 旋转,与之相反的是产生了绕 { b } \{b\} {b} 中的 w ^ \hat{w} w^的旋转。见图3.9。

对于旋转一个向量 v v v,需要注意的是只会涉及一个坐标系,在表示 v v v 向量坐标的坐标系中, w ^ \hat{w} w^ 也同样在这个坐标系中。于是有:
v ′ = R v v' = Rv v′=Rv
角速度
如图3.10所示,假设有一个坐标系 { x ^ , y ^ , z ^ } \{\hat{x}, \hat{y}, \hat{z}\} {x^,y^,z^} 固定于旋转刚体上, x ^ , y ^ , z ^ \hat{x}, \hat{y}, \hat{z} x^,y^,z^ 均为单位向量。先从 x ^ ˙ \dot{\hat{x}} x^˙ 开始,当前只有 x ^ \hat{x} x^ 轴的方向可以随着时间变化。如果我们对时间 t t t 到 t + Δ t t+\Delta{t} t+Δt 的刚体考察,整个坐标系的改变可以认为是绕着通过坐标系原点的某根单位轴 w ^ \hat{w} w^ 旋转了 Δ θ \Delta{\theta} Δθ。
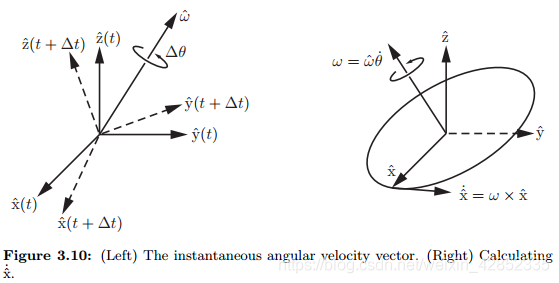
当 Δ t \Delta{t} Δt 趋近于0时, Δ θ / Δ t \Delta{\theta}/\Delta{t} Δθ/Δt 便变成了旋转的变化率 θ ˙ \dot{\theta} θ˙,且 w ^ \hat{w} w^ 可以认为是瞬时的旋转轴。事实上, w ^ \hat{w} w^ 与 θ ˙ \dot{\theta} θ˙ 可以结合起来表达角速度:
(3.25) w = w ^ θ ˙ w = \hat{w}\dot{\theta} \tag{3.25} w=w^θ˙(3.25)
参照图3.10(b),有:
x ^ ˙ = w × x ^ y ^ ˙ = w × y ^ z ^ ˙ = w × z ^ \dot{\hat{x}} = w \times \hat{x} \\ \dot{\hat{y}} = w \times \hat{y} \\ \dot{\hat{z}} = w \times \hat{z} x^˙=w×x^y^˙=w×y^z^˙=w×z^
为了表达这些等式,我们需要选择一个表述 w w w 的坐标系。我们可以选择任何坐标系,但是有两个自然的旋转, { s } \{s\} {s} 与 { b } \{b\} {b}。
(a) 先从固定坐标系 { s } \{s\} {s} 开始。
使 R ( t ) R(t) R(t)作为 t t t 时刻刚体坐标系相对于固定坐标系的方向。 R ˙ ( t ) \dot{R}(t) R˙(t) 是其随时间的变化率。 R ( t ) R(t) R(t) 的第一列,记为 r 1 ( t ) r_1(t) r1(t),描述了 x ^ \hat{x} x^ 在固定坐标系中的方向,同理 r 2 ( t ) , r 3 ( t ) r_2(t), r_3(t) r2(t),r3(t) 描述了
y ^ , z ^ \hat{y}, \hat{z} y^,z^ 在固定坐标系中的方向。在某个特定时刻 t t t,在固定坐标系下的角速度 w s ∈ R 3 w_s \in \mathbb{R}^3 ws∈R3,则有:
r i ˙ = w s × r i , i = 1 , 2 , 3. \dot{r_i} = w_s \times r_i, \quad i=1,2,3. ri˙=ws×ri,i=1,2,3.
写成矩阵形式:
(3.29) R ˙ = [ w s × r 1 w s × r 2 w s × r 3 ] = w s × R \dot{R} = \left[ \begin{matrix} w_s \times r_1 & w_s \times r_2 & w_s \times r_3 \end{matrix} \right] = w_s \times R \tag{3.29} R˙=[ws×r1ws×r2ws×r3]=ws×R(3.29)
为了去除等式右边的叉积,介绍一种新记法, w s × R w_s \times R ws×R 等同于 [ w s ] R [w_s]R [ws]R,其中 [ w s ] [w_s] [ws] 是 w s ∈ R 3 w_s \in \mathbb{R}^3 ws∈R3 的反对称矩阵表达。
有如下定义,给定一个向量 x = [ x 1 , x 2 , x 3 ] T ∈ R 3 x = [x_1,x_2, x_3]^T \in \mathbb{R}^3 x=[x1,x2,x3]T∈R3, 定义
[ x ] = [ 0 − x 3 x 2 x 3 0 − x 1 − x 2 x 1 0 ] [x] = \left[ \begin{matrix} 0 & -x_3 & x_2 \\ x_3 & 0 & -x_1 \\ -x_2 & x_1 & 0 \end{matrix} \right] [x]=⎣⎡0x3−x2−x30x1x2−x10⎦⎤
[ x ] [x] [x] 矩阵是一个 3 × 3 3 \times 3 3×3 的反对称矩阵,即:
[ x ] = − [ x ] T [x] = -[x]^T [x]=−[x]T
3 × 3 3 \times 3 3×3 的实反对称阵集合称作 s o ( 3 ) so(3) so(3)。
定理
给定任意 w ∈ R 3 , R ∈ S O ( 3 ) w \in \mathbb{R}^3,R \in SO(3) w∈R3,R∈SO(3),下列等式成立:
(3.31) R [ w ] R T = [ R w ] R[w] R^T = [Rw] \tag{3.31} R[w]RT=[Rw](3.31)
有了反对称矩阵的表示,重写式(3.29)如下:
(3.33) [ w s ] R = R ˙ [w_s]R = \dot{R} \tag{3.33} [ws]R=R˙(3.33)
两边右乘 R − 1 R^{-1} R−1,有:
(3.34) [ w s ] = R ˙ R − 1 [w_s] = \dot{R}R^{-1} \tag{3.34} [ws]=R˙R−1(3.34)
(b) 下面使 w b w_b wb 作为 w w w 在刚体坐标系中的坐标表达。
w s w_s ws 与 w b w_b wb 是同一个角速度 w w w 在不同坐标系下的向量表示,依据下标消除原则,且有 w s = R s b w b w_s = R_{sb}w_b ws=Rsbwb:
(3.35) w b = R s b − 1 w s = R − 1 w s = R T w s w_b = R_{sb}^{-1}w_s = R^{-1}w_s = R^Tw_s \tag{3.35} wb=Rsb−1ws=R−1ws=RTws(3.35)
用反对称阵表示:
(3.36) [ w b ] = [ R T w s ] = R T [ w s ] R = R T ( R ˙ R T ) R = R T R ˙ = R − 1 R ˙ [w_b] = [R^Tw_s] =R^T[w_s]R =R^T(\dot{R}R^T)R =R^T\dot{R} =R^{-1}\dot{R} \tag{3.36} [wb]=[RTws]=RT[ws]R=RT(R˙RT)R=RTR˙=R−1R˙(3.36)
总体来说,用 R ( t ) R(t) R(t) 表示相对于固定坐标系的坐标系方向,旋转的坐标系的角速度为 w w w,有:
R ˙ R − 1 = [ w s ] R − 1 R ˙ = [ w b ] \dot{R}R^{-1} = [w_s] \\ R^{-1}\dot{R} = [w_b] R˙R−1=[ws]R−1R˙=[wb]
其中, w s ∈ R 3 w_s \in \mathbb{R}^3 ws∈R3 是 w w w 在固定坐标系下的向量坐标表示, [ w s ] ∈ s o ( 3 ) [w_s] \in so(3) [ws]∈so(3) 是它的 3 × 3 3 \times 3 3×3 矩阵表示, w b ∈ R 3 w_b \in \mathbb{R}^3 wb∈R3 是 w w w 在刚体坐标系下的向量坐标表示, [ w b ] ∈ s o ( 3 ) [w_b] \in so(3) [wb]∈so(3) 是它的 3 × 3 3 \times 3 3×3 矩阵表示。
值得注意的是 w b w_b wb 不是相对于移动坐标系的角速度,反之, w b w_b wb 是相对于刚体上的固定坐标系 { b } \{b\} {b}的角速度。
最后,对于任意的坐标系 { d } \{d\} {d} 下的角速度,可以得到在另一个坐标系 { c } \{c\} {c}下的表达。如果我们知道 R c d R_{cd} Rcd,那么有:
w c = R c d w d w_c = R_{cd}w_d wc=Rcdwd
旋转的指数坐标表示
指数坐标以旋转轴(单位向量 w ^ \hat{w} w^)和绕这根轴的角度 θ \theta θ 来表达。 向量 w ^ θ ∈ R 3 \hat{w}\theta \in \mathbb{R}^3 w^θ∈R3 作为旋转的三参数指数坐标。而将 w ^ , θ \hat{w}, \theta w^,θ 分开写是轴-角的表示方法。
对于一个旋转矩阵 R R R,与其对应的指数坐标表示 w ^ θ \hat{w}\theta w^θ 等价于:
- 如果与 { s } \{s\} {s}初始是一致的坐标系绕轴 w ^ \hat{w} w^ 旋转了 θ \theta θ 角度,那么此坐标系相对了 { s } \{s\} {s} 的方向可以用 R R R 来表示。
- 如果与 { s } \{s\} {s}初始是一致的坐标系绕 w ^ θ \hat{w}\theta w^θ 旋转了单位时间( w ^ θ \hat{w}\theta w^θ由这个时间间隔组成),那么此坐标系相对了 { s } \{s\} {s} 的方向可以用 R R R 来表示。
- 如果与 { s } \{s\} {s}初始是一致的坐标系绕 w ^ \hat{w} w^ 旋转了 θ \theta θ 时间,那么此坐标系相对了 { s } \{s\} {s} 的方向可以用 R R R 来表示。
最后两种视角要求我们以线性微分方程来考虑指数坐标。
线性微分方程的一些必要结论
从一个简单的标量线性微分方程开始:
(3.39) x ˙ ( t ) = a x ( t ) \dot{x}(t) = ax(t) \tag{3.39} x˙(t)=ax(t)(3.39)
其中, x ( t ) ∈ R , a ∈ R x(t) \in \mathbb{R}, a \in \mathbb{R} x(t)∈R,a∈R,给定初值为 x ( 0 ) = x 0 x(0) = x_0 x(0)=x0。
式(3.39)有解:
x ( t ) = e a t x 0 x(t) = e^{at}x_0 x(t)=eatx0
指数级数展开为:
e a t = 1 + a t + ( a t ) 2 2 ! + ( a t ) 3 3 ! + ⋯ . e^{at} = 1+ at + \frac{(at)^2}{2!} + \frac{(at)^3}{3!} +\cdots. eat=1+at+2!(at)2+3!(at)3+⋯.
现在考虑线性微分方程:
(3.40) x ˙ ( t ) = A x ( t ) \dot{x}(t) = Ax(t) \tag{3.40} x˙(t)=Ax(t)(3.40)
其中, x ( t ) ∈ R n , A ∈ n × n x(t)\in\mathbb{R}^n, A\in\mathbb{n \times n} x(t)∈Rn,A∈n×n 是常量,给定初值条件 x ( 0 ) = x 0 x(0)=x_0 x(0)=x0。由以上的标量结果,我们猜想方程是解为:
(3.41) x ( t ) = e A t x 0 x(t) = e^{At}x_0 \tag{3.41} x(t)=eAtx0(3.41)
其中,矩阵的级数展开定义为:
(3.42) e A t = I + A t + ( A t ) 2 2 ! + ( A t ) 3 3 ! + ⋯ . e^{At} = I+ At + \frac{(At)^2}{2!} + \frac{(At)^3}{3!} +\cdots. \tag{3.42} eAt=I+At+2!(At)2+3!(At)3+⋯.(3.42)
对于任意的方阵, A B = ̸ B A AB =\not BA AB≠BA,但是对任意的方阵 A A A, 任意的标量 t t t,始终有:
(3.44) A e A t = e A t A Ae^{At} = e^{At}A \tag{3.44} AeAt=eAtA(3.44)
所以有:
x ˙ ( t ) = A e A t x 0 = e A t A x 0 \dot{x}(t) = Ae^{At}x_0 = e^{At}Ax_0 x˙(t)=AeAtx0=eAtAx0
由于矩阵指数是一种无穷级数,可定义一种闭环表达。如 A = P D P − 1 A = PDP^{-1} A=PDP−1,对于 D ∈ R n × n D\in \mathbb{R}^{n\times n} D∈Rn×n,可逆矩阵 P ∈ R n × n P \in \mathbb{R}^{n \times n} P∈Rn×n,则有:
(3.45) e A t = I + A t + ( A t ) 2 2 ! + ⋯ = I + ( P D P − 1 ) t + ( P D P − 1 ) ( P D P − 1 ) t 2 2 ! + ⋯ = P ( I + D t + ( D t ) 2 2 ! + ⋯ ) P − 1 = P e D t P − 1 \begin{aligned} e^{At} &= I + At + \frac{(At)^2}{2!} + \cdots \\ &= I + (PDP^{-1})t + (PDP^{-1})(PDP^{-1})\frac{t^2}{2!} + \cdots \\ &= P(I +Dt + \frac{(Dt)^2}{2!}+\cdots)P^{-1} \\ &= Pe^{Dt}P^{-1} \end{aligned} \tag{3.45} eAt=I+At+2!(At)2+⋯=I+(PDP−1)t+(PDP−1)(PDP−1)2!t2+⋯=P(I+Dt+2!(Dt)2+⋯)P−1=PeDtP−1(3.45)
倘若 D D D 是对角阵, D = d i a g { d 1 , d 2 , . . . , d n } D = diag\{d_1, d_2, ...,d_n\} D=diag{d1,d2,...,dn},其矩阵指数为:
(3.46) e D t = [ e d 1 t 0 ⋯ 0 0 e d 2 t ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ e d n t ] . e^{Dt} = \left[ \begin{matrix} e^{d_1t} & 0 & \cdots & 0 \\ 0 & e^{d_2t} & \cdots & 0 \\ \vdots & \vdots & \ddots & \vdots \\ 0 & 0 & \cdots & e^{d_nt} \end{matrix} \right]. \tag{3.46} eDt=⎣⎢⎢⎢⎡ed1t0⋮00ed2t⋮0⋯⋯⋱⋯00⋮ednt⎦⎥⎥⎥⎤.(3.46)
定理
线性微分方程 x ( t ) ˙ = A x ( t ) \dot{x(t)} = Ax(t) x(t)˙=Ax(t),初值为 x ( 0 ) = x 0 x(0) = x_0 x(0)=x0,其中 A ∈ R n × n A \in \mathbb{R}^{n \times n} A∈Rn×n 是常量, x ( t ) ∈ R n x(t) \in \mathbb{R}^n x(t)∈Rn,有解:
(3.47) x ( t ) = e A t x 0 x(t) = e^{At}x_0 \tag{3.47} x(t)=eAtx0(3.47)
其中:
(3.48) e A t = I + t A + t 2 2 ! A 2 + t 3 3 ! A 3 + ⋯ . e^{At} = I + tA + \frac{t^2}{2!}A^2 + \frac{t^3}{3!}A^3 + \cdots. \tag{3.48} eAt=I+tA+2!t2A2+3!t3A3+⋯.(3.48)
矩阵 e A t e^{At} eAt 进一步满足以下条件:
- d ( e A t ) / d t = A e A t = e A t A d(e^{At})/dt = Ae^{At} = e^{At}A d(eAt)/dt=AeAt=eAtA.
- 如果 A = P D P − 1 A = PDP^{-1} A=PDP−1, 则有 e A t = P e D t P − 1 e^{At} = Pe^{Dt}P^{-1} eAt=PeDtP−1.
- 如果 A B = B A AB = BA AB=BA,则有 e A e B = e A + B e^Ae^B = e^{A+B} eAeB=eA+B.
- ( e A ) − 1 = e − A (e^A)^{-1} = e^{-A} (eA)−1=e−A.
其中,第4个性质可由第三个中令 B = − A B = -A B=−A 得到。即 e A e − A = I e^{A}e^{-A} = I eAe−A=I,则有第四个性质。
旋转的指数坐标
旋转的指数坐标可以两种视角看待:
- 绕单位旋转轴 w ^ \hat{w} w^ ( w ^ ∈ R 3 , ∣ ∣ w ^ ∣ ∣ = 1 \hat{w} \in \mathbb{R}^3, ||\hat{w}|| = 1 w^∈R3,∣∣w^∣∣=1)旋转了角度 θ ∈ R \theta \in \mathbb{R} θ∈R。
- 将上述两者相乘,得到三维向量 w ^ θ ∈ R 3 \hat{w}\theta \in \mathbb{R}^3 w^θ∈R3。
当我们表达机器人关节的运动时,第一种更具优势,可以把绕轴旋转的角度分离。

如图3.11所示,三维向量 p ( 0 ) p(0) p(0) 绕着 w ^ \hat{w} w^ 旋转了 θ \theta θ 角度,这里我们假设所有的量都是在固定坐标系下的表示。此次旋转过程还可以通过将 p ( 0 ) p(0) p(0) 绕着 w ^ \hat{w} w^ 轴,以恒定速度 1 r a d / s 1 rad/s 1rad/s 从 t = 0 t = 0 t=0 到 t = θ t = \theta t=θ 旋转到达。以 p ( t ) p(t) p(t) 来表示向量的路径,则速度 p ˙ ( t ) \dot{p}(t) p˙(t) 为:
(3.49) p ˙ = w ^ × p \dot{p} = \hat{w} \times p \tag{3.49} p˙=w^×p(3.49)
证明过程: p ( t ) p(t) p(t) 与 w ^ \hat{w} w^ 间的恒定夹角为 ϕ \phi ϕ,注意到 p p p 的轨迹为一个绕着 w ^ \hat{w} w^ 半径为 ∣ ∣ p ∣ ∣ s i n ϕ ||p||sin\phi ∣∣p∣∣sinϕ 的圆弧。速度 p ˙ \dot{p} p˙ 与路径相切,由此推导。
同样上式可以表示为:
(3.50) p ˙ = [ w ^ ] p \dot{p} = [\hat{w}]p \tag{3.50} p˙=[w^]p(3.50)
初值条件为 p ( 0 ) p(0) p(0)。这是 x ˙ = A x \dot{x} = Ax x˙=Ax 形式的微分方程,解为:
(3.50) p ( t ) = e [ w ^ ] t p ( 0 ) p(t) = e^{[\hat{w}]t}p(0) \tag{3.50} p(t)=e[w^]tp(0)(3.50)
由于 t , θ t, \theta t,θ 是可交换的,等式也可以写为:
p ( θ ) = e [ w ^ ] θ p ( 0 ) p(\theta) = e^{[\hat{w}]\theta}p(0) p(θ)=e[w^]θp(0)
对矩阵指数 e [ w ^ ] θ e^{[\hat{w}]\theta} e[w^]θ 级数展开,直接的有 [ w ^ ] 3 = − [ w ^ ] [\hat{w}]^3 = -[\hat{w}] [w^]3=−[w^], [ w ^ ] 4 = − [ w ^ ] 2 [\hat{w}]^4 = -[\hat{w}]^2 [w^]4=−[w^]2, [ w ^ ] 5 = [ w ^ ] [\hat{w}]^5 = [\hat{w}] [w^]5=[w^],则有:
e [ w ^ ] θ = I + [ w ^ ] θ + [ w ^ ] 2 θ 2 2 ! + [ w ^ ] 3 θ 3 3 ! + ⋯ = I + ( θ − θ 3 3 ! + θ 5 5 ! − ⋯ ) [ w ^ ] + ( θ 2 2 ! − θ 4 4 ! + θ 6 6 ! − ⋯ ) [ w ^ ] 2 \begin{aligned} e^{[\hat{w}]\theta} &= I + [\hat{w}]\theta + [\hat{w}]^2\frac{\theta^2}{2!} + [\hat{w}]^3\frac{\theta^3}{3!} + \cdots \\ &= I + (\theta - \frac{\theta^3}{3!} + \frac{\theta^5}{5!} - \cdots)[\hat{w}] + (\frac{\theta^2}{2!} - \frac{\theta^4}{4!} +\frac{\theta^6}{6!} - \cdots)[\hat{w}]^2 \end{aligned} e[w^]θ=I+[w^]θ+[w^]22!θ2+[w^]33!θ3+⋯=I+(θ−3!θ3+5!θ5−⋯)[w^]+(2!θ2−4!θ4+6!θ6−⋯)[w^]2
同时有:
s i n θ = θ − θ 3 3 ! + θ 5 5 ! − ⋯ c o s θ = 1 − θ 2 2 ! − θ 4 4 ! − ⋯ sin\theta = \theta - \frac{\theta^3}{3!} + \frac{\theta^5}{5!} - \cdots \\ cos\theta = 1 - \frac{\theta^2}{2!} - \frac{\theta^4}{4!} - \cdots sinθ=θ−3!θ3+5!θ5−⋯cosθ=1−2!θ2−4!θ4−⋯
定理
给定一个向量 w ^ θ ∈ R 3 \hat{w}\theta \in \mathbb{R}^3 w^θ∈R3, θ \theta θ 为任意标量, w ^ ∈ R 3 \hat{w} \in \mathbb{R}^3 w^∈R3 是单位向量, [ w ^ θ ] [\hat{w}\theta] [w^θ]的矩阵指数为 [ w ^ ] θ = [ w ^ θ ] ∈ s o ( 3 ) [\hat{w}]\theta = [\hat{w}\theta] \in so(3) [w^]θ=[w^θ]∈so(3):
(3.51) R o t ( w ^ , θ ) = e [ w ^ ] θ = I + s i n θ [ w ^ ] + ( 1 − c o s θ ) [ w ^ ] 2 ∈ S O ( 3 ) Rot(\hat{w},\theta) = e^{[\hat{w}]\theta} = I + sin\theta[\hat{w}] + (1-cos\theta)[\hat{w}]^2 \in SO(3) \tag{3.51} Rot(w^,θ)=e[w^]θ=I+sinθ[w^]+(1−cosθ)[w^]2∈SO(3)(3.51)
上式也即罗德里格斯旋转公式。
可以看到,使用矩阵指数来创造一个绕轴 w ^ \hat{w} w^旋转的矩阵。进一步的, e [ w ^ ] θ p e^{[\hat{w}]\theta}p e[w^]θp 具有把 p ∈ R 3 p \in \mathbb{R}^3 p∈R3 绕着固定轴 w ^ \hat{w} w^ 旋转 θ \theta θ 角度的效果。
类似的,考虑由三个列向量组成的旋转矩阵 R R R,旋转矩阵 R ′ = e [ w ^ ] θ R = R o t ( w ^ , θ ) R R' = e^{[\hat{w}]\theta}R = Rot(\hat{w}, \theta)R R′=e[w^]θR=Rot(w^,θ)R,是将 R R R 绕着固定坐标系里的 w ^ \hat{w} w^ 旋转 θ \theta θ 角后的方向。而 R ′ ′ = R e [ w ^ ] θ = R R o t ( w ^ , θ ) R'' = Re^{[\hat{w}]\theta} = RRot(\hat{w}, \theta) R′′=Re[w^]θ=RRot(w^,θ),是将 R R R 在刚体坐标系里的 w ^ \hat{w} w^ 旋转 θ \theta θ 角后的方向。
下一步的任务是证明对于任意的 R ∈ S O ( 3 ) R \in SO(3) R∈SO(3),总是能找到一个单位向量 w ^ \hat{w} w^ 和一个标量 θ \theta θ,使得 R = e [ w ^ ] θ R = e^{[\hat{w}]\theta} R=e[w^]θ。
旋转的矩阵对数
如果 w ^ θ \hat{w}\theta w^θ 表示旋转矩阵 R R R 的指数坐标,那么反对称阵 [ w ^ θ ] = [ w ^ ] θ [\hat{w}\theta] = [\hat{w}]\theta [w^θ]=[w^]θ 是旋转矩阵的矩阵对数。正如矩阵指数给出了以角速度 [ w ^ ] θ [\hat{w}]\theta [w^]θ 旋转一秒的旋转矩阵 R ∈ S O ( 3 ) R\in SO(3) R∈SO(3),矩阵对数用来寻找恒定的角速度 [ w ^ ] θ ∈ s o ( 3 ) [\hat{w}]\theta \in so(3) [w^]θ∈so(3),在这样的角速度下,旋转一秒使 I I I 转到 R R R。或者说:
e x p : [ w ^ ] θ ∈ s o ( 3 ) → R ∈ S O ( 3 ) l o g : R ∈ S O ( 3 ) → [ w ^ ] θ ∈ s o ( 3 ) exp: [\hat{w}]\theta \in so(3) \to R \in SO(3) \\ log: R \in SO(3) \to [\hat{w}]\theta \in so(3) exp:[w^]θ∈so(3)→R∈SO(3)log:R∈SO(3)→[w^]θ∈so(3)
将 e [ w ^ ] θ e^{[\hat{w}]\theta} e[w^]θ展开得到:
[ c θ + w 1 ^ 2 ( 1 − c θ ) w 1 ^ w 2 ^ ( 1 − c θ ) − w 3 ^ s θ w 1 ^ w 3 ^ ( 1 − c θ ) + w 2 ^ s θ w 1 ^ w 2 ^ ( 1 − c θ ) + w 3 ^ s θ c θ + w 2 ^ 2 ( 1 − c θ ) w 2 ^ w 3 ^ ( 1 − c θ ) − w 1 ^ s θ w 1 ^ w 3 ^ ( 1 − c θ ) − w 2 ^ s θ w 2 ^ w 3 ^ ( 1 − c θ ) + w 1 ^ s θ c θ + w 3 ^ 2 ( 1 − c θ ) ] \left[ \begin{matrix} c_\theta+\hat{w_1}^2(1-c_\theta) & \hat{w_1}\hat{w_2}(1-c_\theta) - \hat{w_3}s_\theta & \hat{w_1}\hat{w_3}(1-c_\theta) + \hat{w_2}s_\theta \\ \hat{w_1}\hat{w_2}(1-c_\theta) + \hat{w_3}s_\theta & c_\theta+\hat{w_2}^2(1-c_\theta) & \hat{w_2}\hat{w_3}(1-c_\theta) - \hat{w_1}s_\theta \\ \hat{w_1}\hat{w_3}(1-c_\theta) - \hat{w_2}s_\theta & \hat{w_2}\hat{w_3}(1-c_\theta) + \hat{w_1}s_\theta & c_\theta+\hat{w_3}^2(1-c_\theta) \end{matrix} \right] ⎣⎡cθ+w1^2(1−cθ)w1^w2^(1−cθ)+w3^sθw1^w3^(1−cθ)−w2^sθw1^w2^(1−cθ)−w3^sθcθ+w2^2(1−cθ)w2^w3^(1−cθ)+w1^sθw1^w3^(1−cθ)+w2^sθw2^w3^(1−cθ)−w1^sθcθ+w3^2(1−cθ)⎦⎤
其中, w ^ = ( w ^ 1 , w ^ 2 , w ^ 3 ) \hat{w} = (\hat{w}_1, \hat{w}_2,\hat{w}_3) w^=(w^1,w^2,w^3),让上述矩阵等于 R ∈ S O ( 3 ) R\in SO(3) R∈SO(3),有:
r 32 − r 23 = 2 w ^ 1 s i n θ r 13 − r 31 = 2 w ^ 2 s i n θ r 21 − r 12 = 2 w ^ 3 s i n θ r_{32} - r_{23} = 2\hat{w}_1sin\theta \\ r_{13} - r_{31} = 2\hat{w}_2sin\theta \\ r_{21} - r_{12} = 2\hat{w}_3sin\theta r32−r23=2w^1sinθr13−r31=2w^2sinθr21−r12=2w^3sinθ
只要 s i n θ = ̸ 0 sin \theta =\not 0 sinθ≠0(或者说 θ \theta θ不是 π \pi π的整数倍),可以得到:
w ^ 1 = 1 2 s i n θ ( r 32 − r 23 ) w ^ 2 = 1 2 s i n θ ( r 13 − r 31 ) w ^ 3 = 1 2 s i n θ ( r 21 − r 12 ) \hat{w}_1 = \frac{1}{2sin\theta}(r_{32} - r_{23}) \\ \hat{w}_2 = \frac{1}{2sin\theta}(r_{13} - r_{31}) \\ \hat{w}_3 = \frac{1}{2sin\theta}(r_{21} - r_{12}) w^1=2sinθ1(r32−r23)w^2=2sinθ1(r13−r31)w^3=2sinθ1(r21−r12)
也可以用反对称阵表达为:
(3.53) [ w ^ ] = [ 0 − w ^ 3 w ^ 2 w ^ 3 0 − w ^ 1 − w ^ 2 w ^ 1 0 ] = 1 2 s i n θ ( R − R T ) [\hat{w}] = \left[ \begin{matrix} 0 & -\hat{w}_3 & \hat{w}_2 \\ \hat{w}_3 & 0 & -\hat{w}_1 \\ -\hat{w}_2 & \hat{w}_1 & 0 \end{matrix} \right] = \frac{1}{2sin\theta}(R - R^T) \tag{3.53} [w^]=⎣⎡0w^3−w^2−w^30w^1w^2−w^10⎦⎤=2sinθ1(R−RT)(3.53)
回忆下, w ^ \hat{w} w^ 表示的是给定旋转矩阵 R R R 的旋转轴。由于 s i n θ sin\theta sinθ 在分母上,如果 θ \theta θ 是 π \pi π 的整数倍时, [ w ^ ] [\hat{w}] [w^] 便不好定义,这个情况后面再说。先假设 s i n θ = ̸ 0 sin\theta =\not0 sinθ≠0,然后找到 θ \theta θ 的表达式。取式(3.52)矩阵的迹trace,且有 w ^ 1 2 + w ^ 2 2 + w ^ 3 2 = 1 \hat{w}_1^2 + \hat{w}_2^2 + \hat{w}_3^2 = 1 w^12+w^22+w^32=1:
(3.54) t r R = r 11 + r 22 + r 33 = 1 + 2 c o s θ tr R = r_{11} + r_{22} + r_{33} = 1+2cos\theta \tag{3.54} trR=r11+r22+r33=1+2cosθ(3.54)
对于满足 1 + 2 c o s θ = t r R 1+2cos\theta = trR 1+2cosθ=trR 的,且不是 π \pi π的整数倍的 θ \theta θ, [ w ^ ] [\hat{w}] [w^] 矩阵可以由式(3.53)表示。
而对于 θ = k π \theta = k\pi θ=kπ 的情况,先不要管 w ^ \hat{w} w^,我们先使 R = I R = I R=I,那么 w ^ \hat{w} w^ 就没有定义。当 k k k 是奇数时,由式(3.51),有:
(3.55) R = e [ w ^ ] π = I + 2 [ w ^ ] 2 R = e^{[\hat{w}]\pi} = I +2[\hat{w}]^2 \tag{3.55} R=e[w^]π=I+2[w^]2(3.55)
对角线上的元素为:
(3.56) w ^ i = ± r i i + 1 2 , i = 1 , 2 , 3 \hat{w}_i = \pm\sqrt{\frac{r_{ii}+1}{2}}, i=1,2,3 \tag{3.56} w^i=±2rii+1,i=1,2,3(3.56)
非对角元素有如下等式:
(3.57) 2 w ^ 1 w ^ 2 = r 12 , 2 w ^ 2 w ^ 3 = r 23 , 2 w ^ 1 w ^ 3 = r 13 , 2\hat{w}_1\hat{w}_2 = r_{12},\\ 2\hat{w}_2\hat{w}_3 = r_{23},\\ \tag{3.57} 2\hat{w}_1\hat{w}_3 = r_{13}, 2w^1w^2=r12,2w^2w^3=r23,2w^1w^3=r13,(3.57)
从等式(3.55)我们知道 R R R必须是对称阵: r 12 = r 21 r_{12} = r_{21} r12=r21, r 23 = r 32 r_{23} = r_{32} r23=r32, r 13 = r 31 r_{13} = r_{31} r13=r31。式(3.56)和式(3.57)可能都需要来求取 w ^ \hat{w} w^。一旦找到解,则 R = e [ w ^ ] θ R = e^{[\hat{w}]\theta} R=e[w^]θ,其中 θ = ± π , ± 3 π , ⋯ \theta = \pm\pi, \pm3\pi,\cdots θ=±π,±3π,⋯
我们把 θ \theta θ 的取值限制在 [ 0 , π ] [0,\pi] [0,π],那么下面的算法可用于旋转矩阵的对数。
算法
给定一个 R ∈ S O ( 3 ) R\in SO(3) R∈SO(3),找到一个 θ ∈ [ 0 , π ] \theta \in [0, \pi] θ∈[0,π] 和一个单位旋转轴 w ^ ∈ R 3 \hat{w} \in \mathbb{R}^3 w^∈R3, ∣ ∣ w ^ ∣ ∣ = 1 ||\hat{w}|| = 1 ∣∣w^∣∣=1 ,那么 e [ w ^ ] θ = R e^{[\hat{w}]\theta} = R e[w^]θ=R。反对称阵 [ w ^ ] θ ∈ s o ( 3 ) [\hat{w}]\theta \in so(3) [w^]θ∈so(3) 是矩阵的对数。
-
如果 R = I R = I R=I, 那么 θ = 0 \theta = 0 θ=0, w ^ \hat{w} w^ 无定义。
-
如果 t r R = − 1 tr R = -1 trR=−1,那么 θ = π \theta = \pi θ=π。 w ^ \hat{w} w^ 取下列三个值的任一个均可:
(3.58) w ^ = 1 2 ( 1 + r 33 ) [ r 13 r 23 1 + r 33 ] \hat{w} = \frac{1}{\sqrt{2(1+r_{33})}} \left[ \begin{matrix} r_{13} \\ r_{23} \\ 1+r_{33} \end{matrix} \right] \tag{3.58} w^=2(1+r33)1⎣⎡r13r231+r33⎦⎤(3.58)
或:
(3.59) w ^ = 1 2 ( 1 + r 22 ) [ r 12 1 + r 22 r 32 ] \hat{w} = \frac{1}{\sqrt{2(1+r_{22})}} \left[ \begin{matrix} r_{12} \\ 1+r_{22} \\ r_{32} \end{matrix} \right] \tag{3.59} w^=2(1+r22)1⎣⎡r121+r22r32⎦⎤(3.59)
或:
(3.60) w ^ = 1 2 ( 1 + r 11 ) [ 1 + r 11 r 21 r 31 ] \hat{w} = \frac{1}{\sqrt{2(1+r_{11})}} \left[ \begin{matrix} 1+r_{11} \\ r_{21} \\ r_{31} \end{matrix} \right] \tag{3.60} w^=2(1+r11)1⎣⎡1+r11r21r31⎦⎤(3.60) -
否则 θ = c o s − 1 ( 1 2 ( t r R − 1 ) ) ∈ [ 0 , π ) \theta = cos^{-1}(\frac{1}{2}(tr R-1))\in[0, \pi) θ=cos−1(21(trR−1))∈[0,π),且:
(3.61) [ w ^ ] = 1 2 s i n θ ( R − R T ) [\hat{w}] = \frac{1}{2sin\theta}(R-R^T) \tag{3.61} [w^]=2sinθ1(R−RT)(3.61)
由于每个 R ∈ S O ( 3 ) R\in SO(3) R∈SO(3) 满足上述三个条件中的一个,所以对于每一个 R R R 都存在一个矩阵对数 [ w ^ ] θ [\hat{w}]\theta [w^]θ,即指数坐标 w ^ θ \hat{w}\theta w^θ。
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!