从卫星接收机到组合导航【二】(光纤陀螺启动)
文章目录
- 光纤陀螺启动问题
- 负载开关
- 负载开关控制
光纤陀螺启动问题
本系统使用的是单轴光纤陀螺,该陀螺的启动电流比较大,大概在1.3A(这里只看稳压源显示的,实际应该比这大)左右,三个陀螺的则需要3.6A以上的启动电流,常温下使用20W或者25W(5V/4A)DC/DC模块没啥问题,但是本系统设计工作温度为-40~+60度,在低温或者高温时电源模块效率会下降,会出现陀螺启动不起来问题。为了解决该问题,这里使用了TPS22966负载开关来控制陀螺的启动(开关默认下拉)。
负载开关
使用双通道负载开关分别控制Y轴和Z陀螺启动(X轴随着系统进行启动),其中Y陀螺和电源模块供的5V如下图:
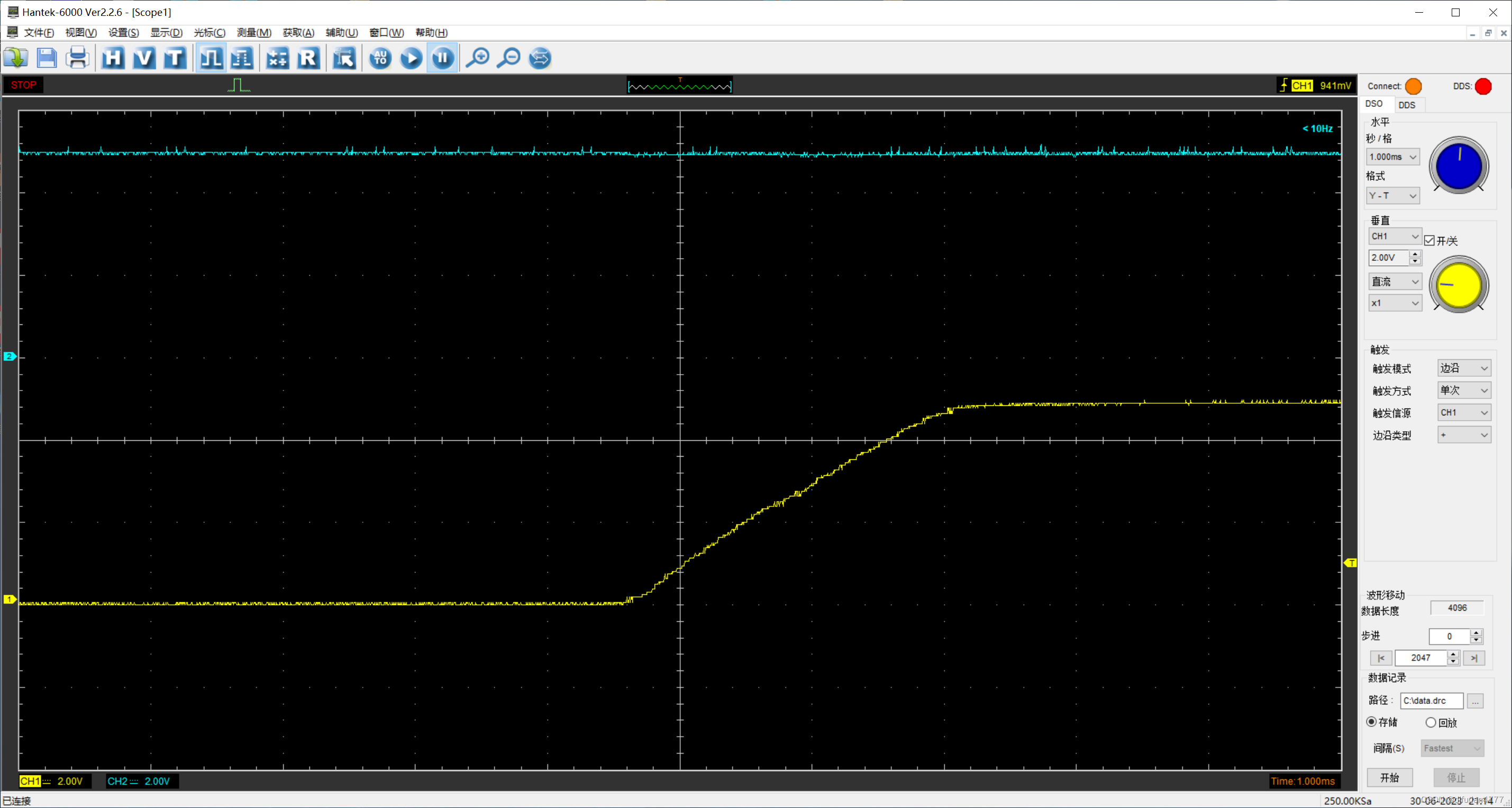
可以看到示波器显示的CH1(黄色)有个5V启动过程,其中整个启动时间大概在2.4ms,CH2一直持续在5V没有电压下降。Z轴启动与Y轴一样,如下图: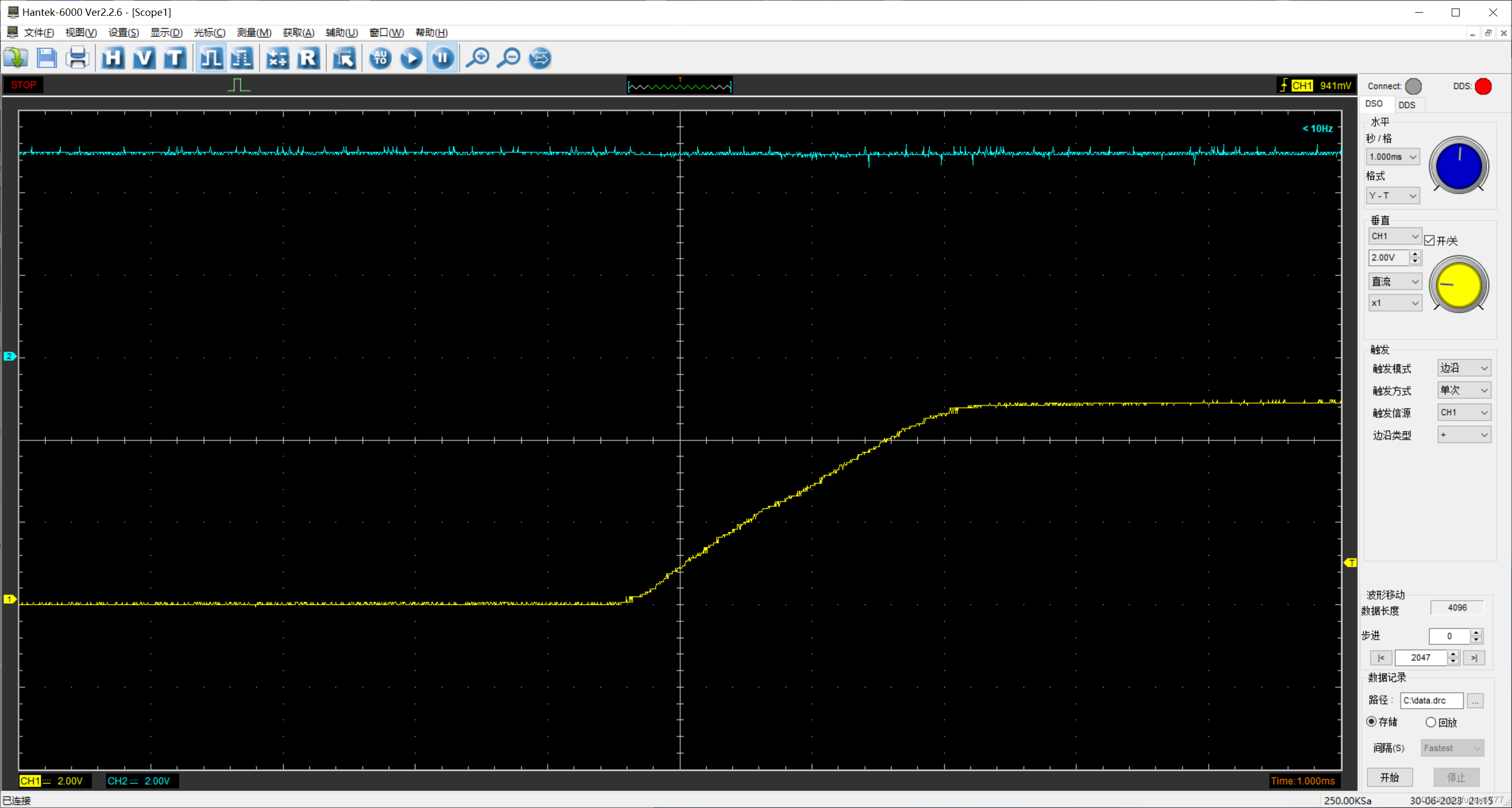
负载开关控制
负载开关是由ZYNQ上电后,间隔1.5S进行对陀螺上电,其中Verlog代码如下:
//Y陀螺和Z陀螺启动reg [31:0] gyro_power_count;reg gyro_power;initial begingyro_y_power <= 1'b0;gyro_z_power <=1'b0;gyro_power_count <= 32'd0;end//控制X、Y陀螺的always @( posedge S_AXI_ACLK ) beginif ( S_AXI_ARESETN == 1'b0 )begingyro_y_power <= 1'b0;gyro_z_power <= 1'b0;gyro_power_count <= 32'd0;end elsebegin if(gyro_power_count < 32'd150_000_000) begin gyro_power_count <= gyro_power_count + 1'b1;endelse if(gyro_power_count == 32'd150_000_000)begin //1.5Sgyro_power_count <= gyro_power_count + 1'b1;gyro_y_power <= 1'b1;endelse if(gyro_power_count == 32'd300_000_000)begin //3S//else if(gyro_power_count == 32'd200_000_000)begin //2S//else if(gyro_power_count == 32'd250_000_000)begin //2.5Sgyro_z_power <= 1'b1;endelse if(gyro_power_count > 32'd300_000_000)begin//else if(gyro_power_count > 32'd200_000_000)begin//不需要做事endelse begingyro_power_count <= gyro_power_count + 1'b1;endendend
上述代码 S_AXI_ACLK 为100MHz ,从ZYNQ PS中来。
X轴(黄色)和Y轴的启动时序如下图:
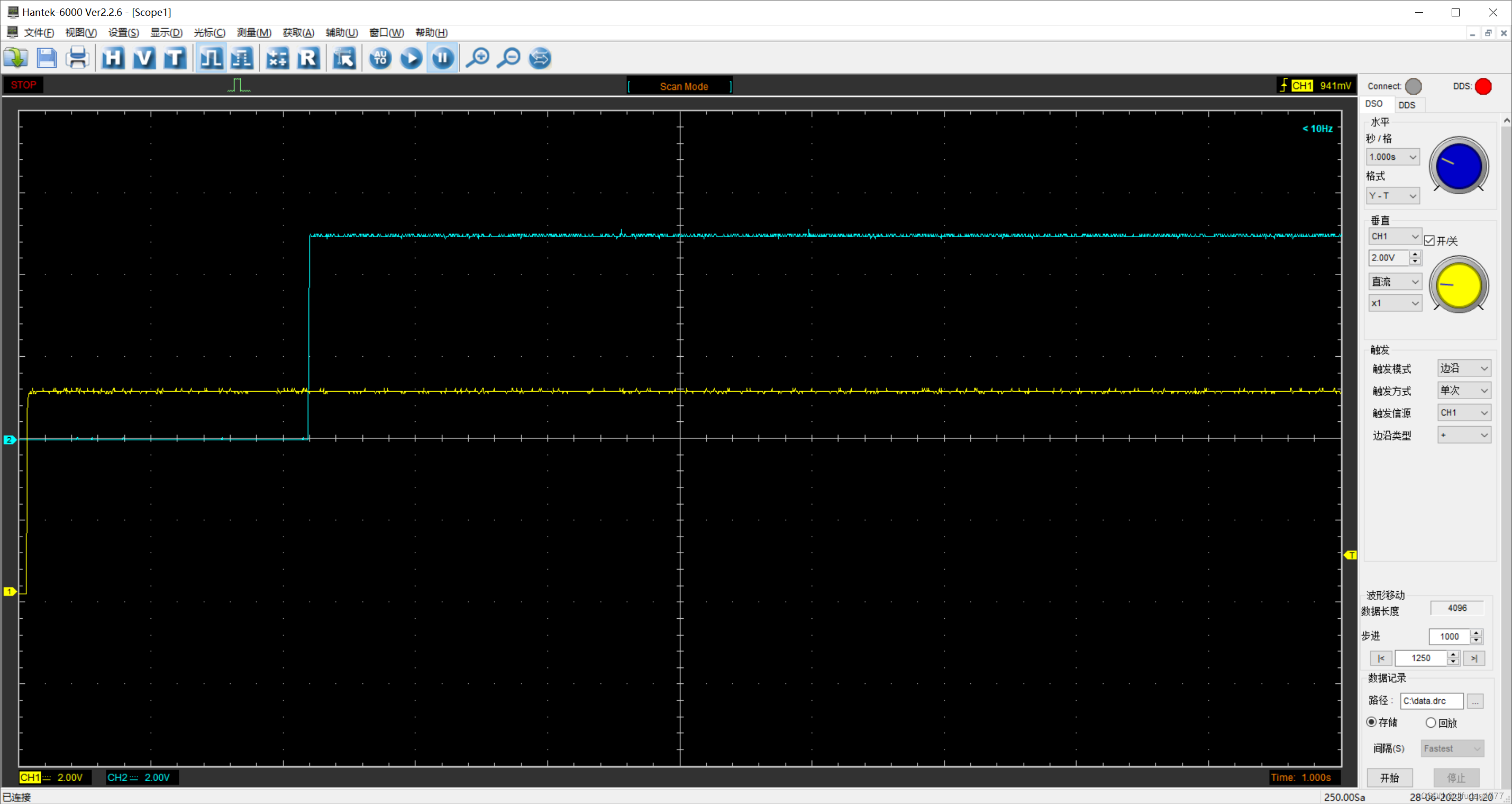
Y轴(黄色)和Z轴的启动时序如下图:
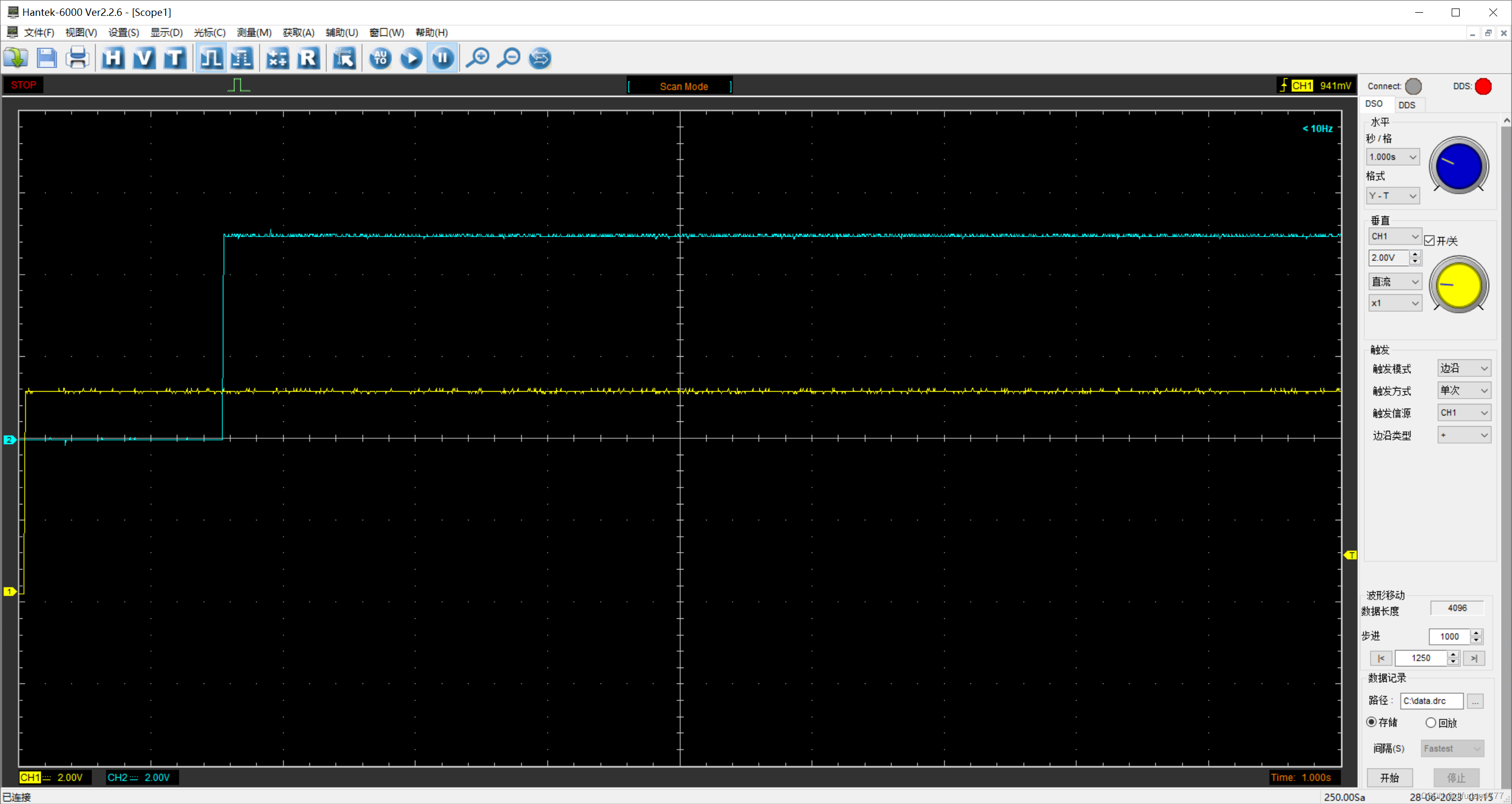
其中时序表(按照X启动时间为起始时间)如下:
| 陀螺 | 时间 |
|---|---|
| X螺 | 0S |
| Y轴 | 2.1S |
| Z轴 | 3.6S |
其中上电电流变化图可看如下视频:
VID_20230630_211657
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!