机械臂机器人——(2)位姿描述与坐标变换
文章目录
- 1.刚体的位置与位姿
- 正交坐标系
- 正交坐标系的性质
- 正交坐标变换矩阵的几何意义
- 2.坐标系平移与旋转变换
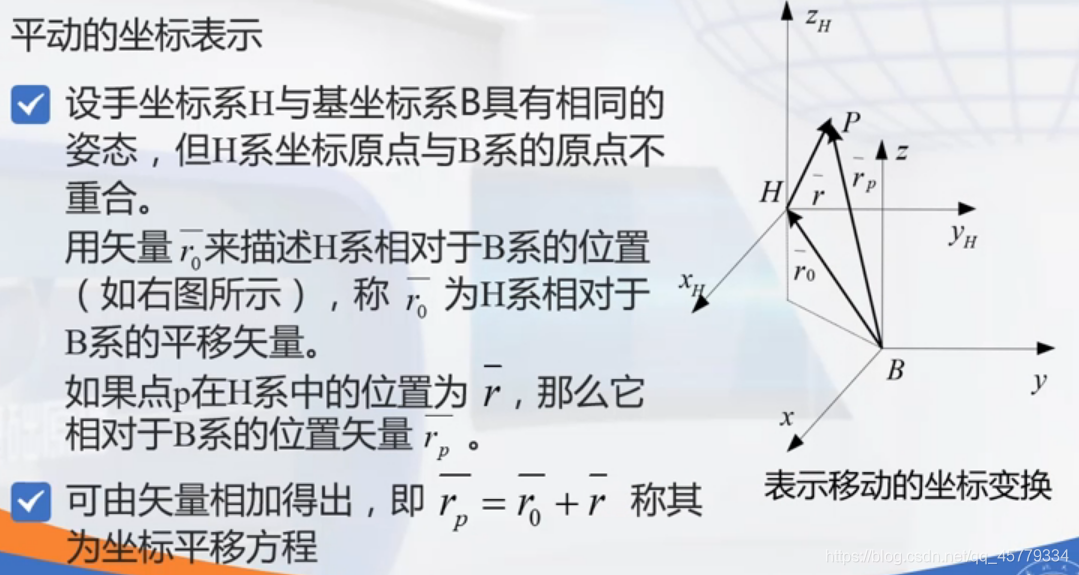
- (1)坐标系平移
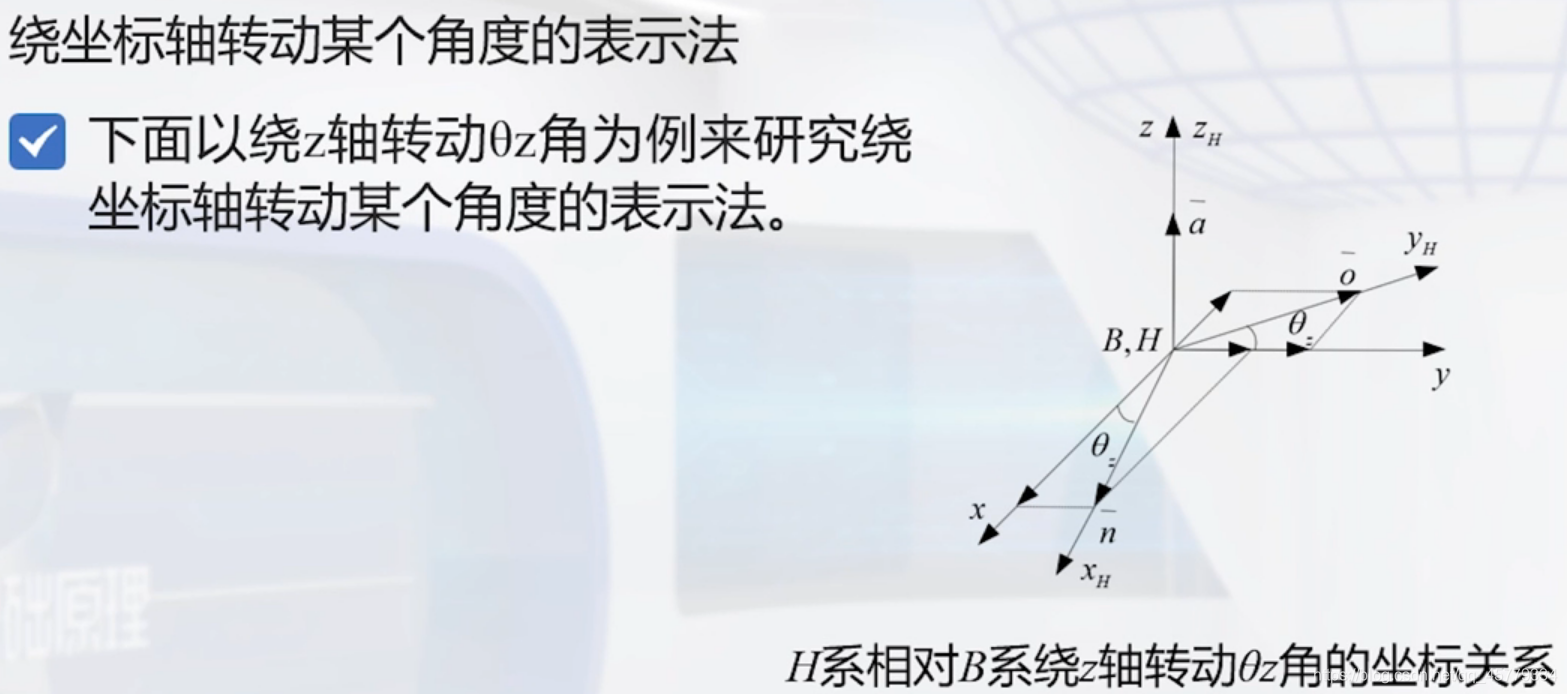
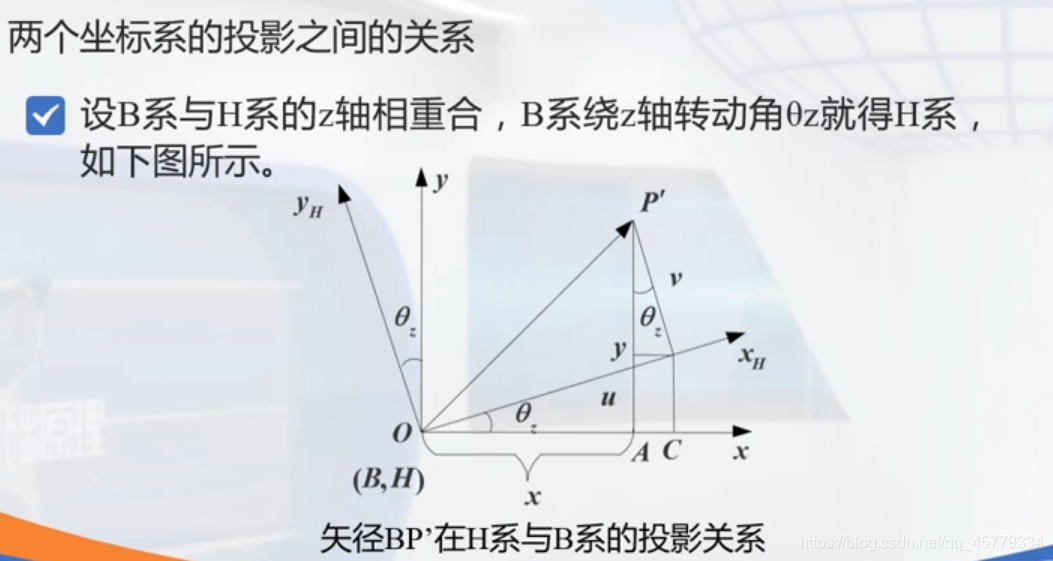
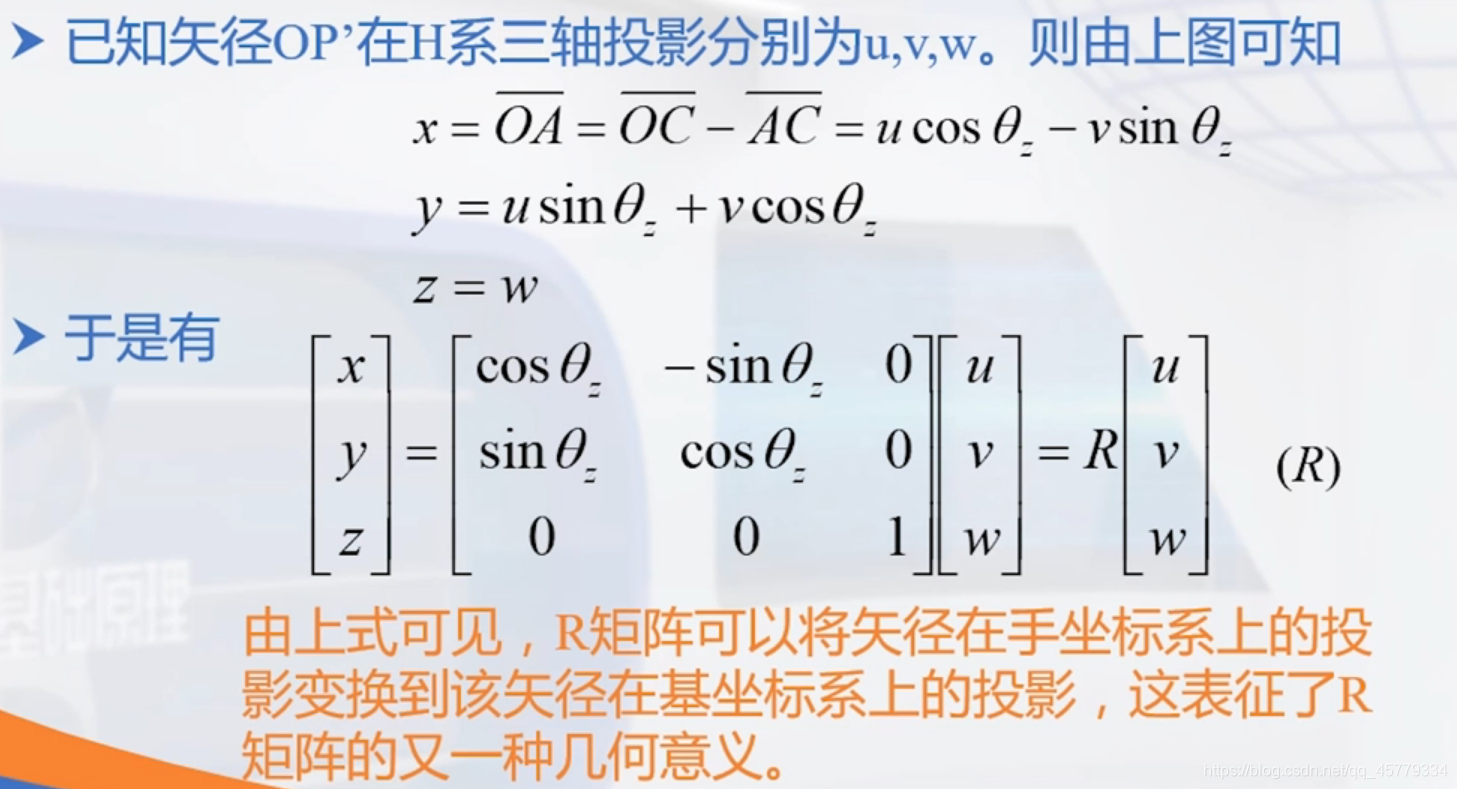
- (2)坐标系旋转
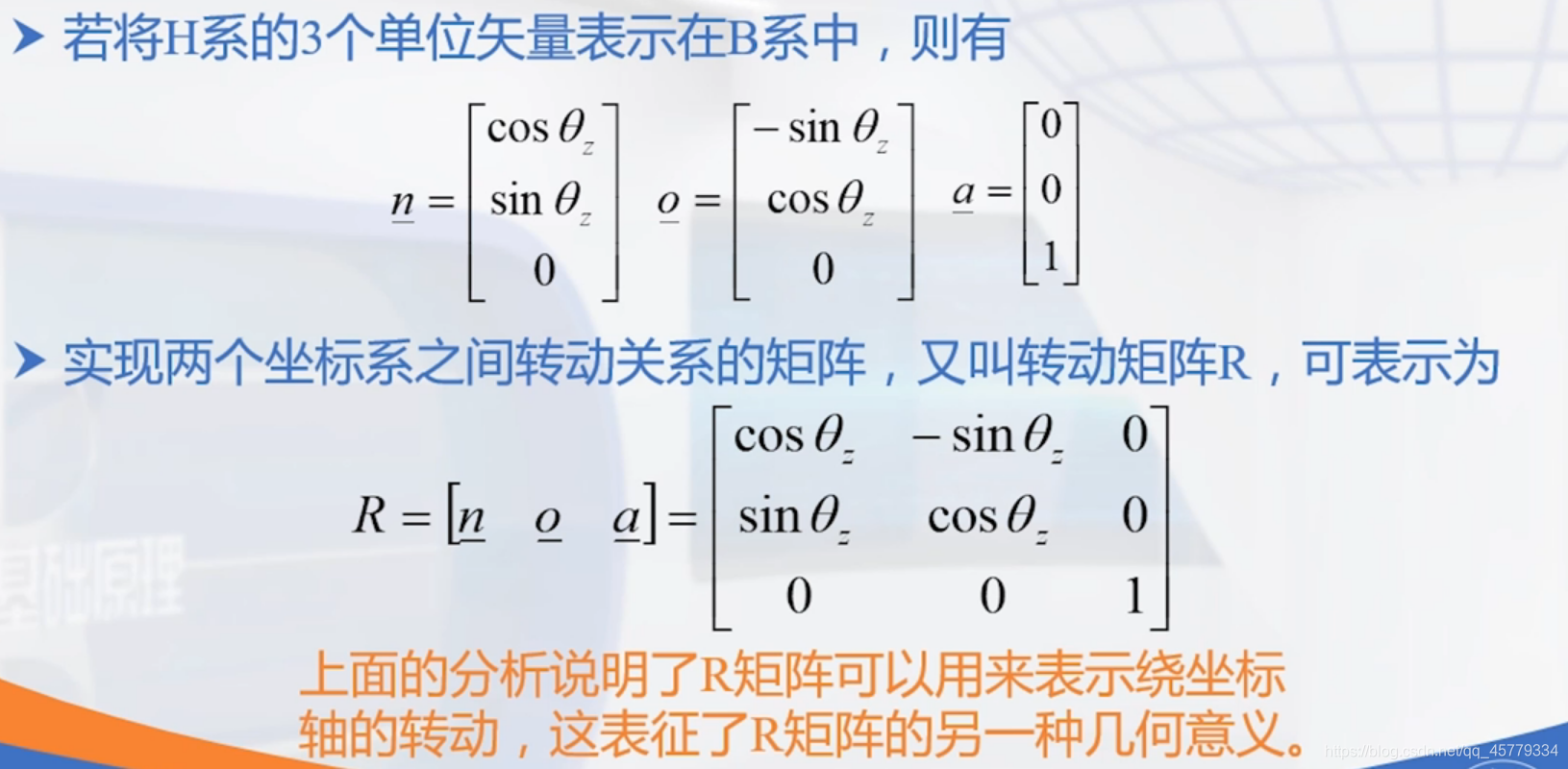
- 变换矩阵
- (3)复合变换
- 3.机器人的齐次坐标
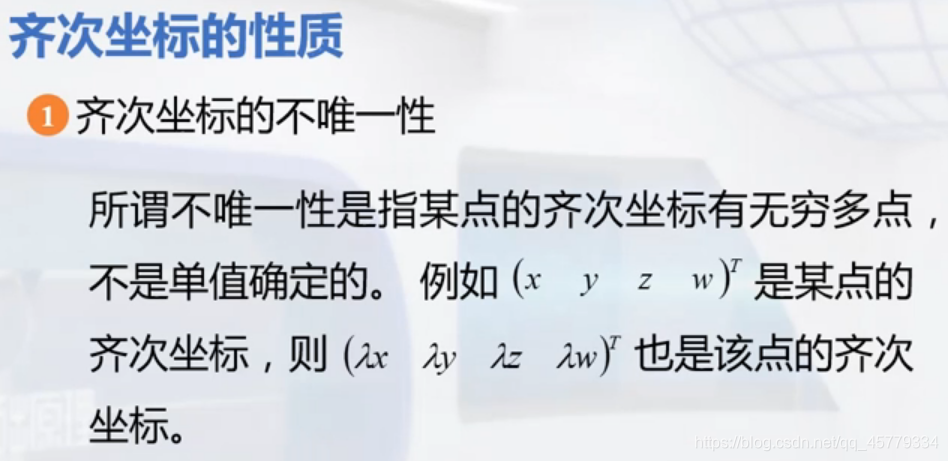
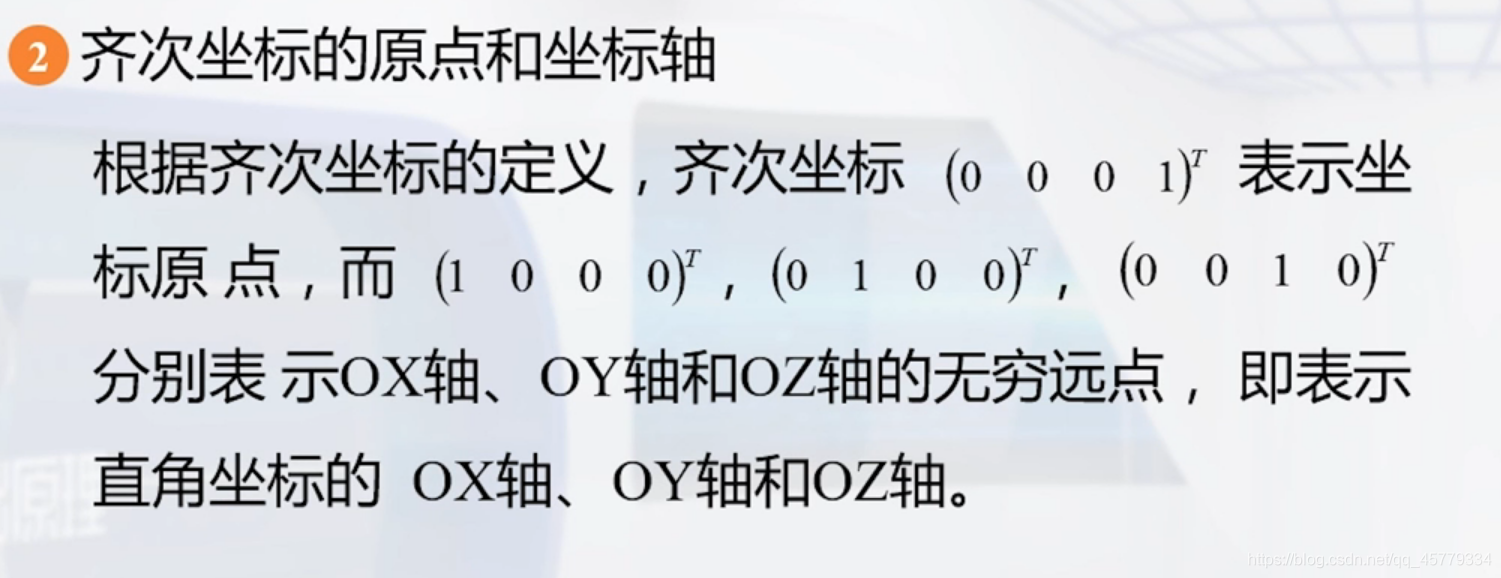
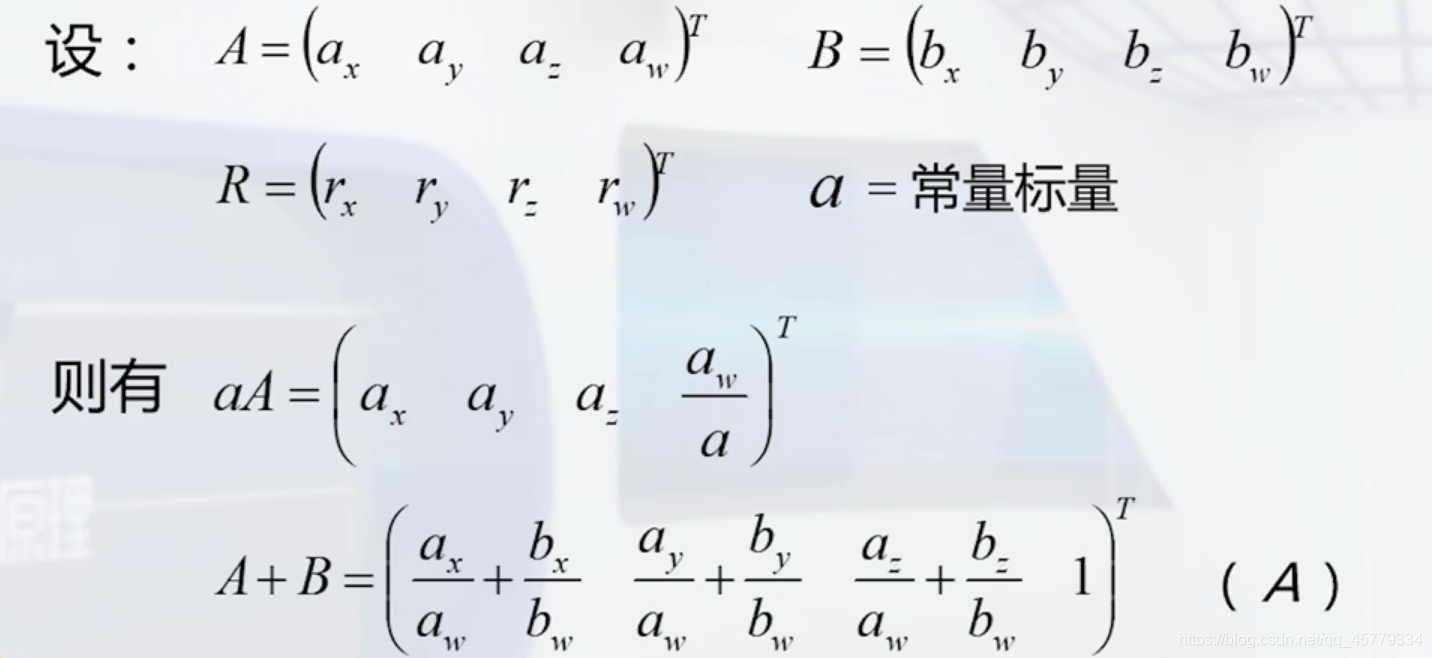
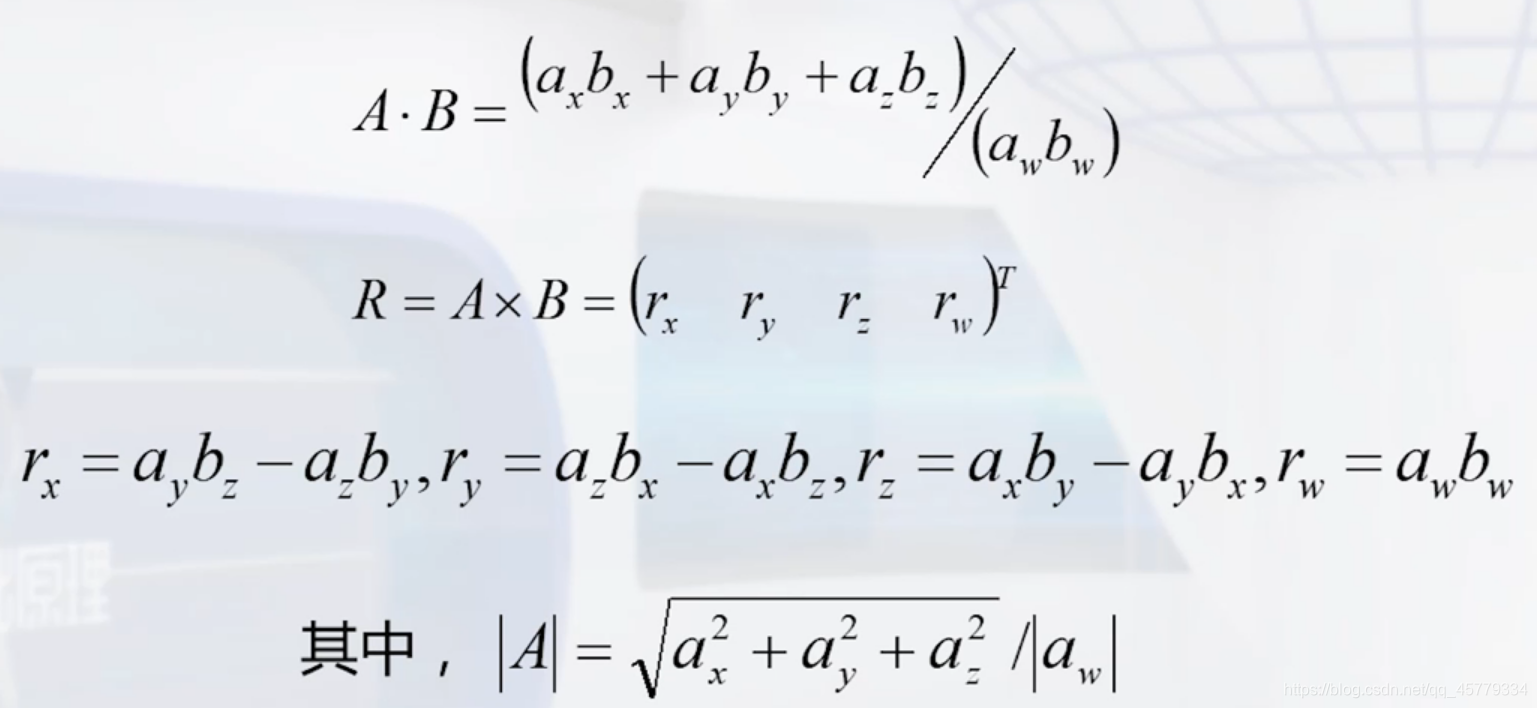
- (1)齐次坐标基本概念和性质
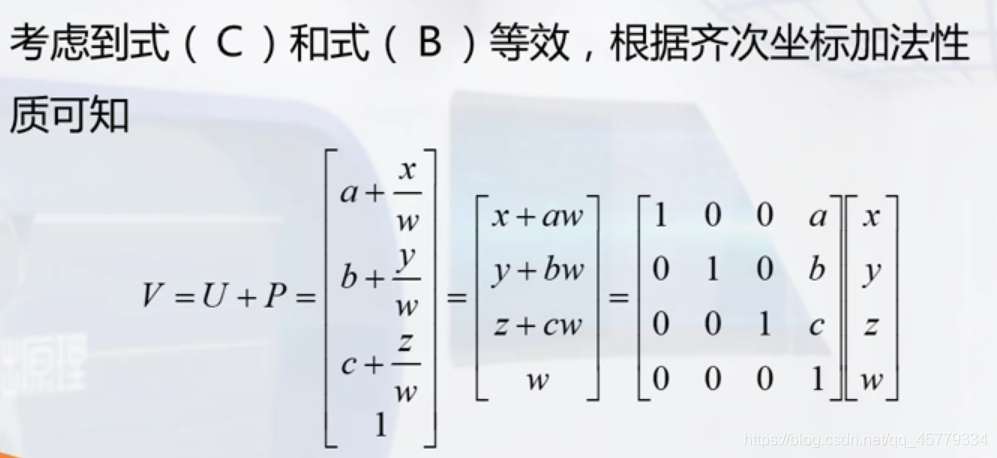
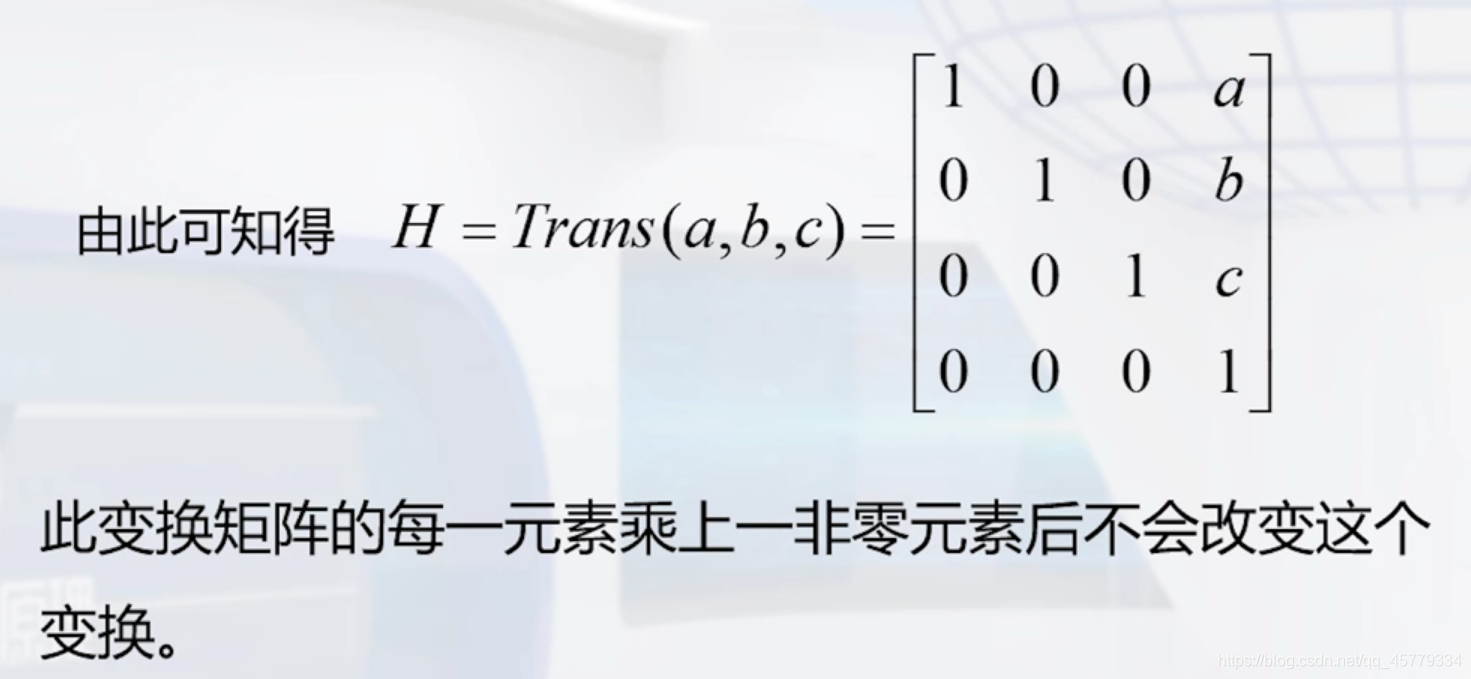
- (2)利用齐次变换矩阵表示平移变换
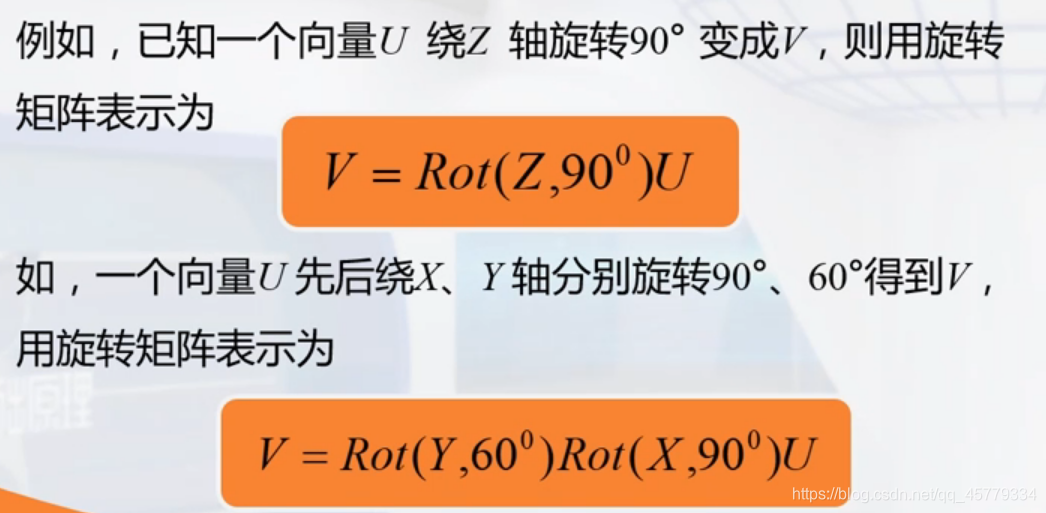
- (3)利用齐次变换矩阵表示旋转变换
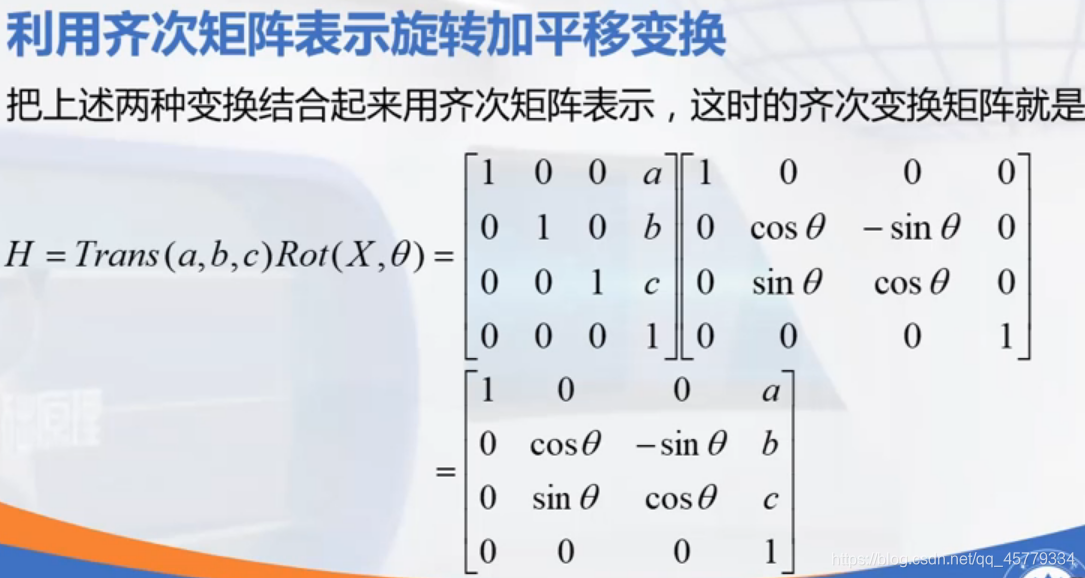
- (4)利用齐次变换矩阵表示旋转+平移变换
- (4)利用齐次变换矩阵表示手的转动和移动
- 4.机器人的齐次变换
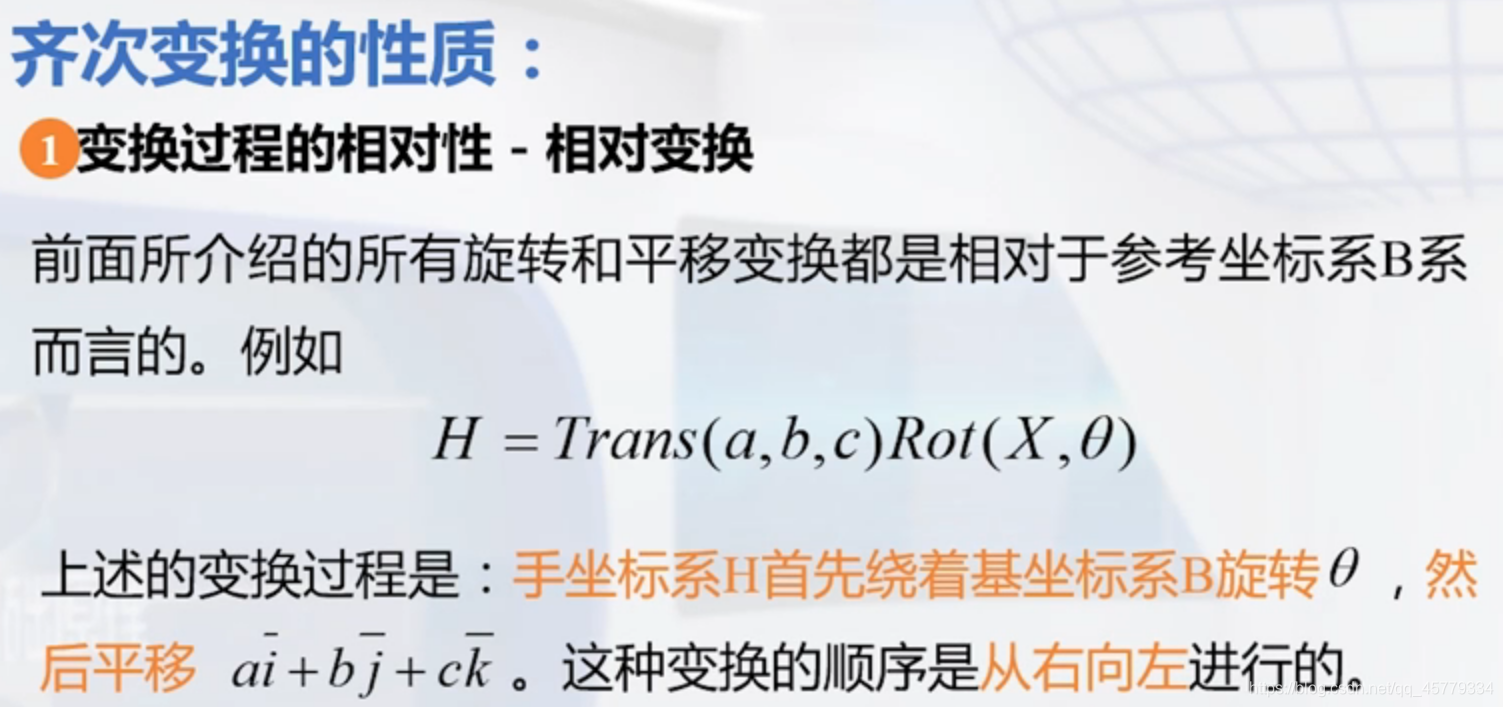
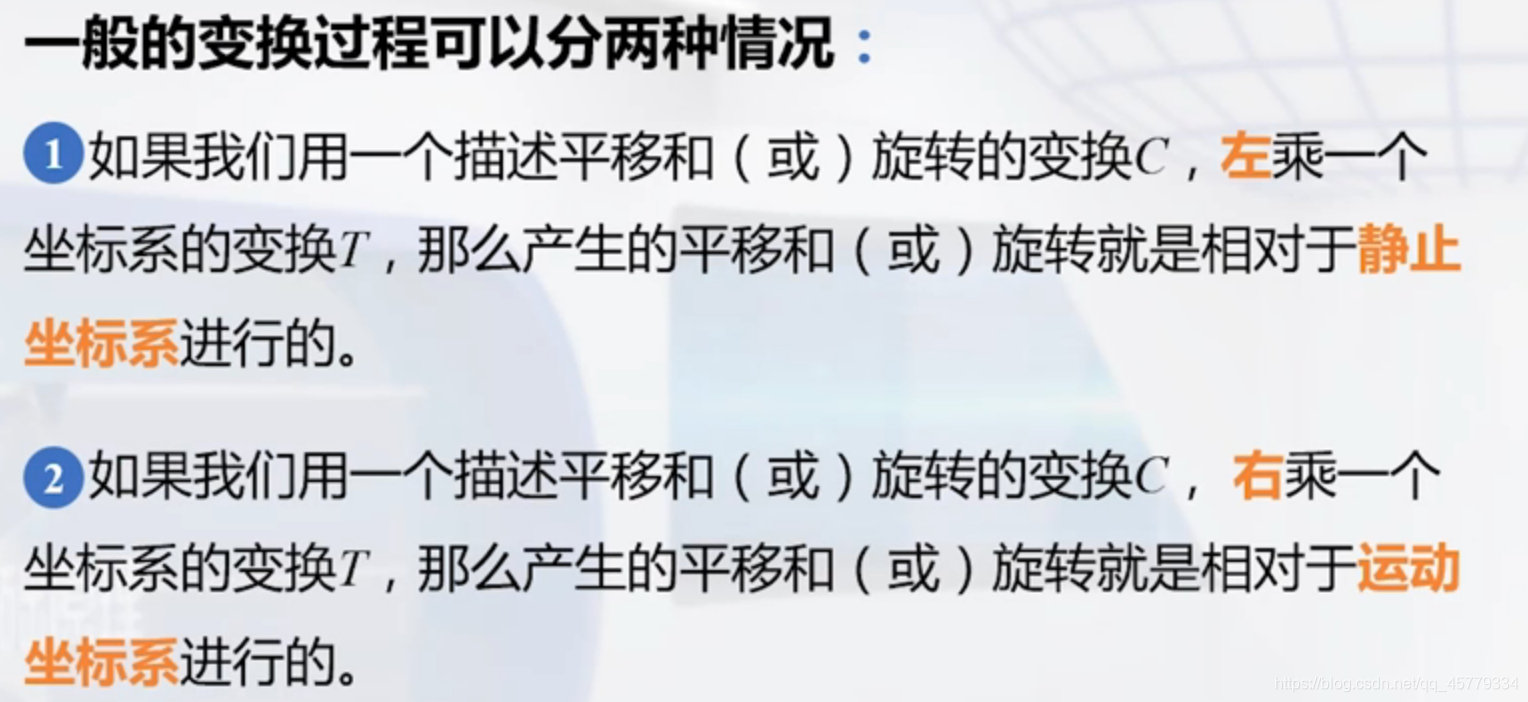
- (1)齐次变换的性质
- 性质一:
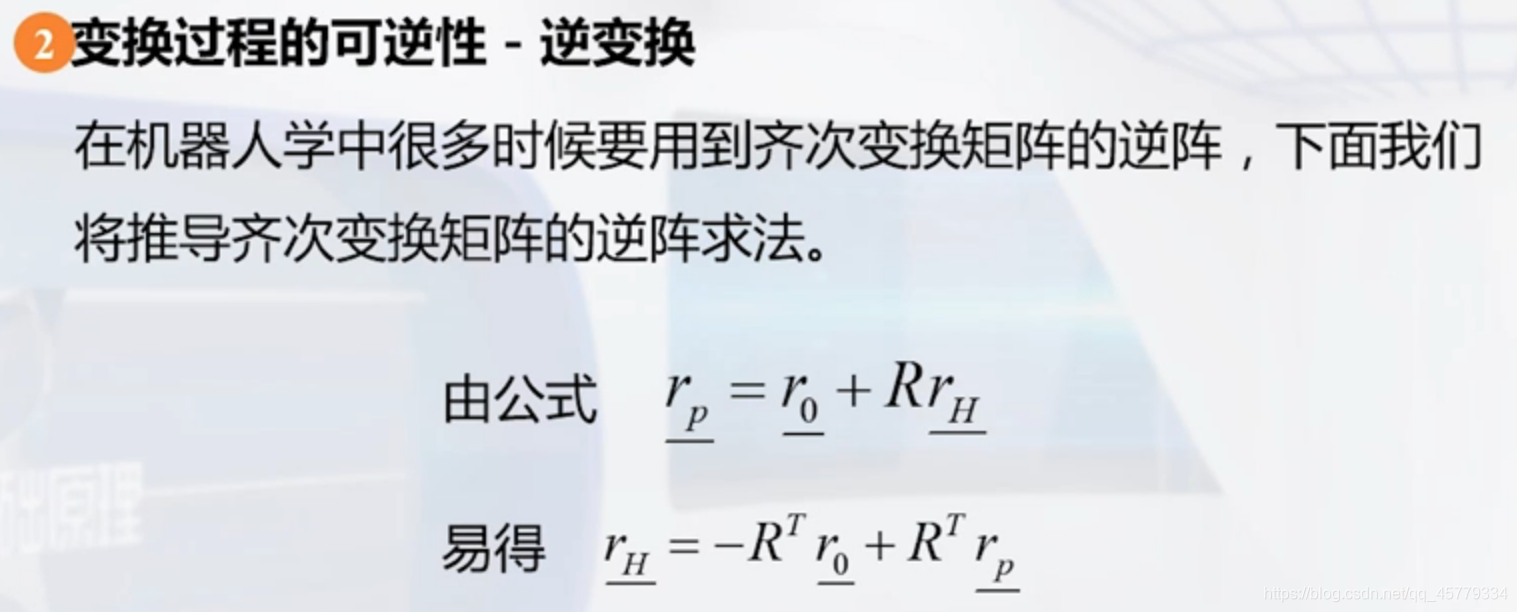
- 性质二:
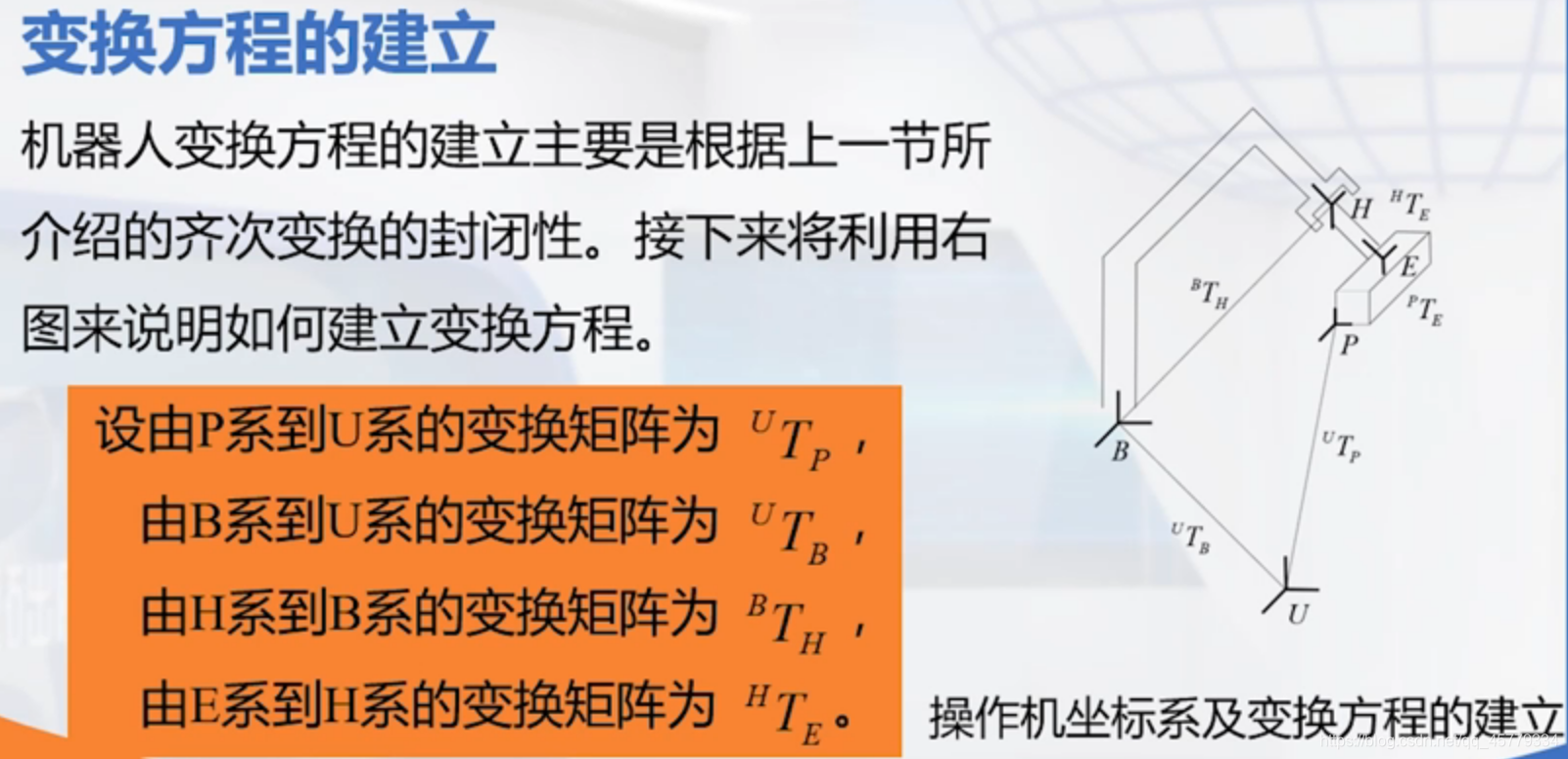
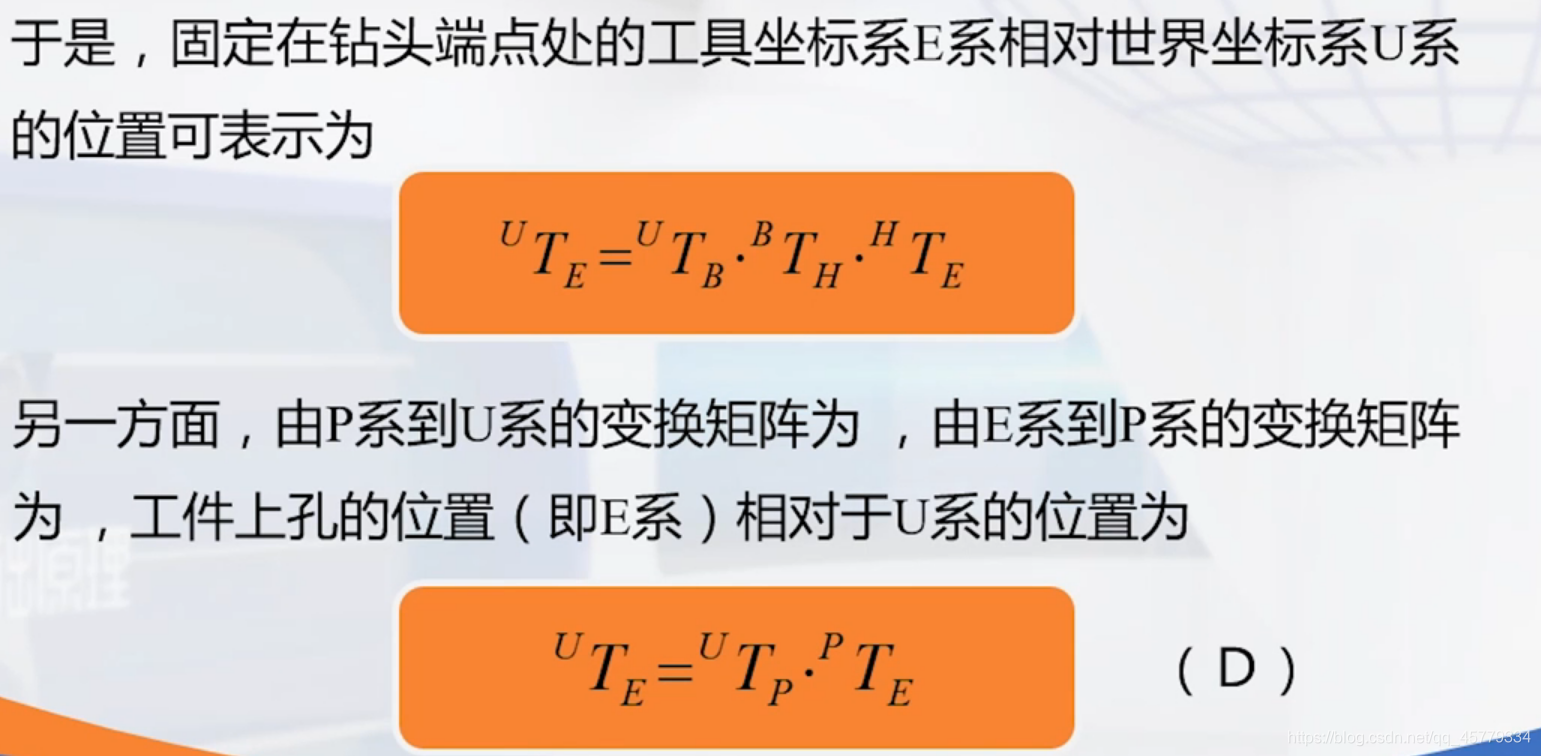
- 建立变换方程
学习总校的机器人基础原理MOOC,学习记录。
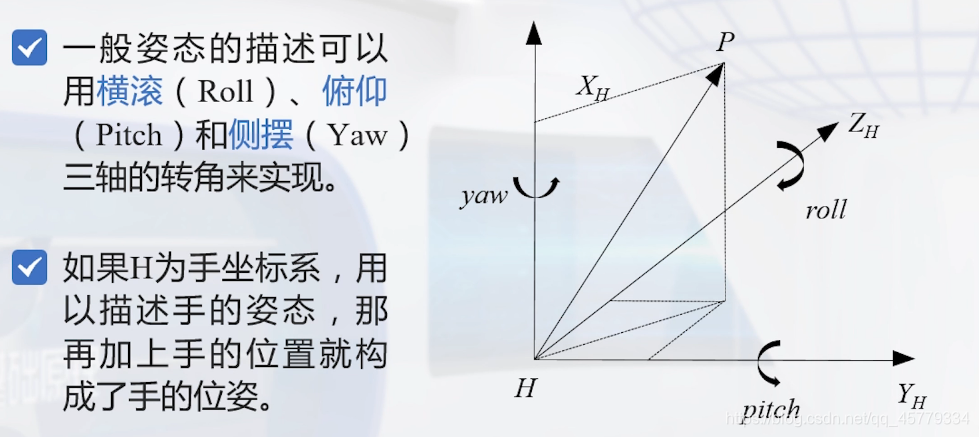
1.刚体的位置与位姿

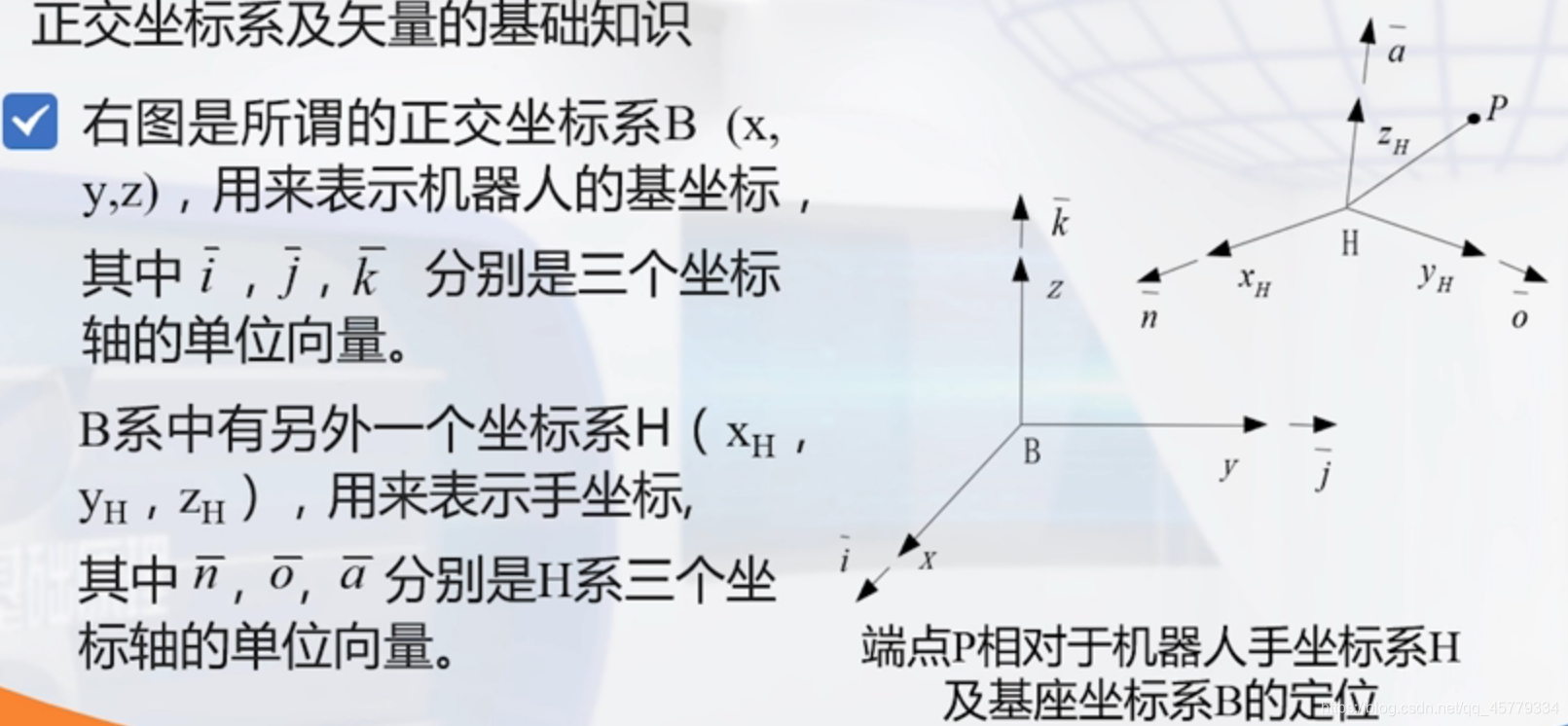
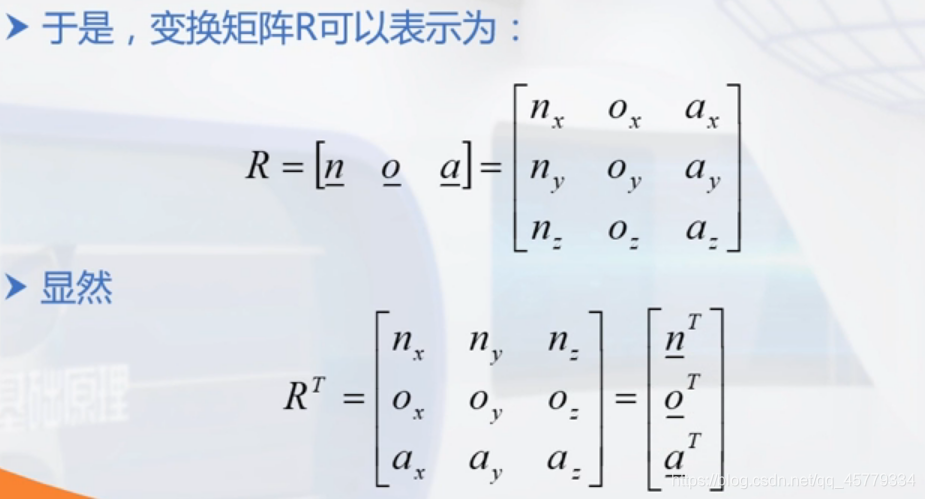
正交坐标系
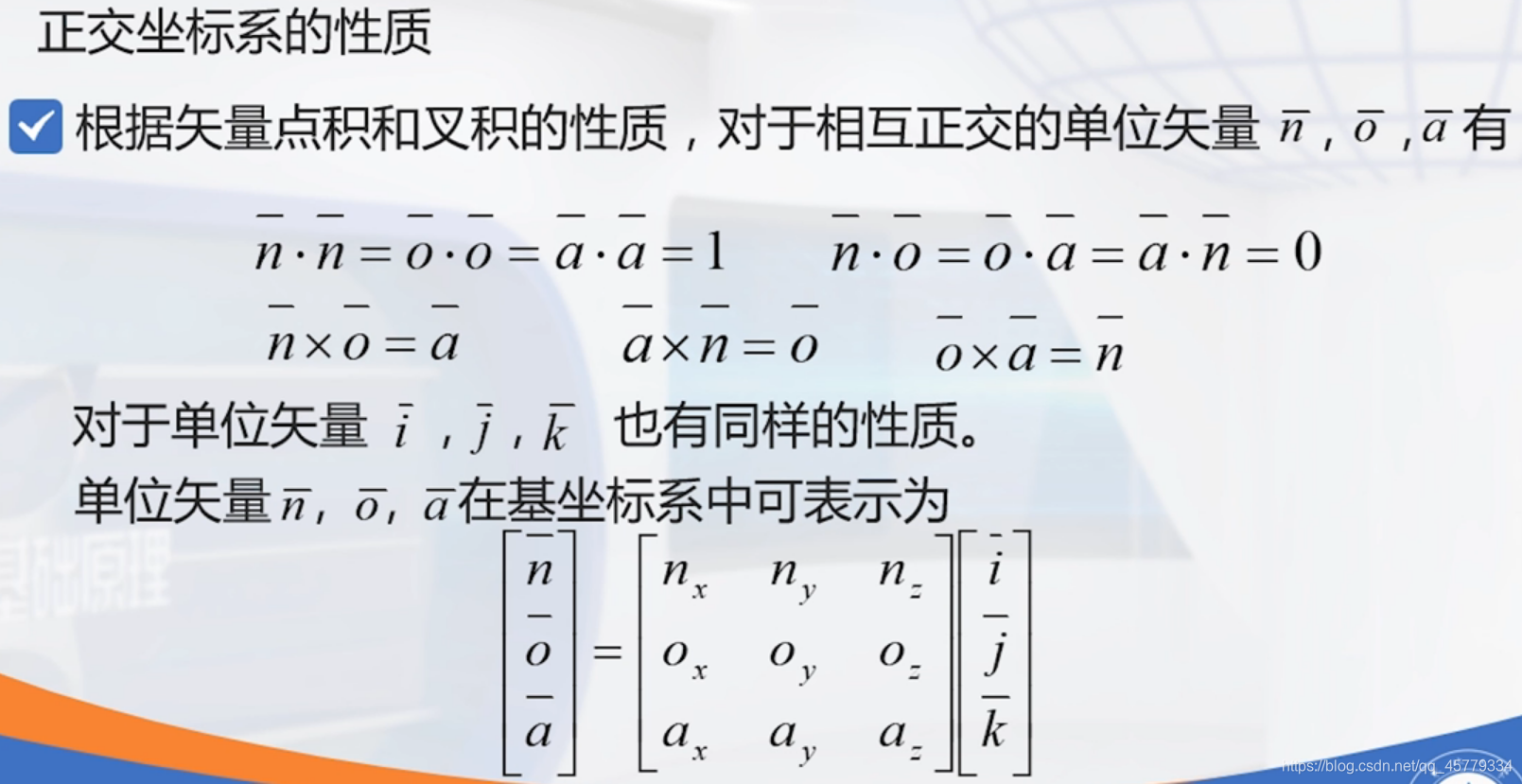
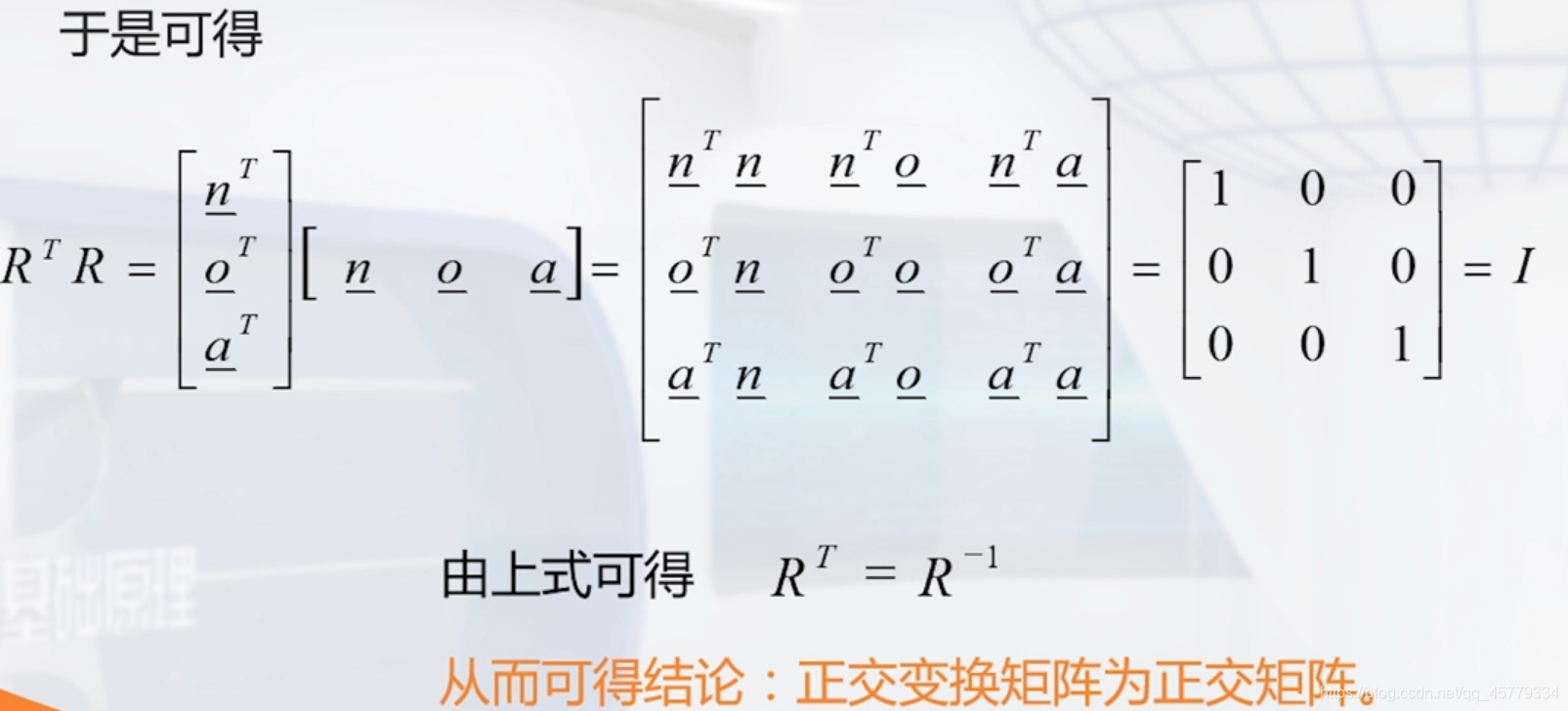
正交坐标系的性质
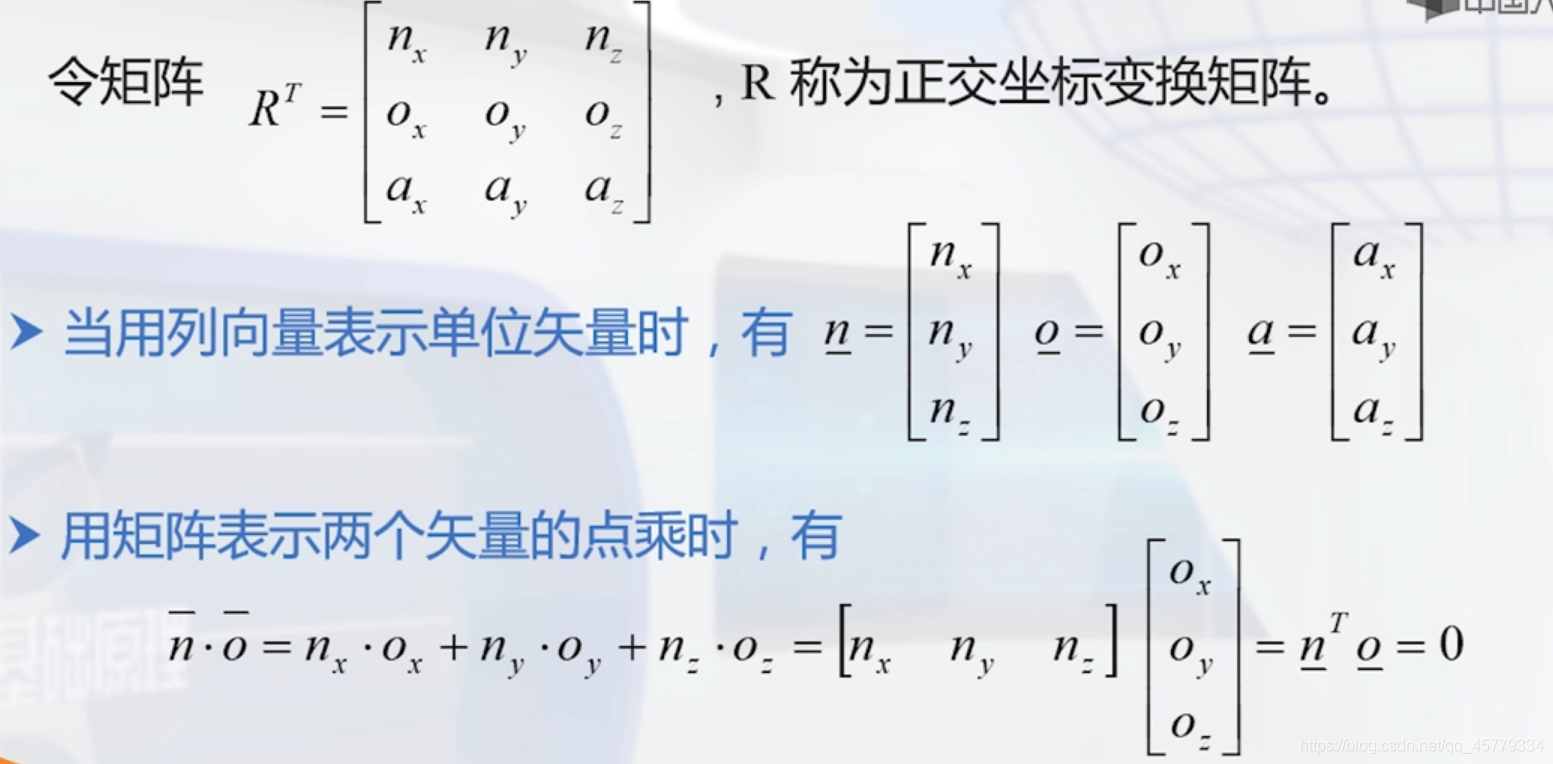
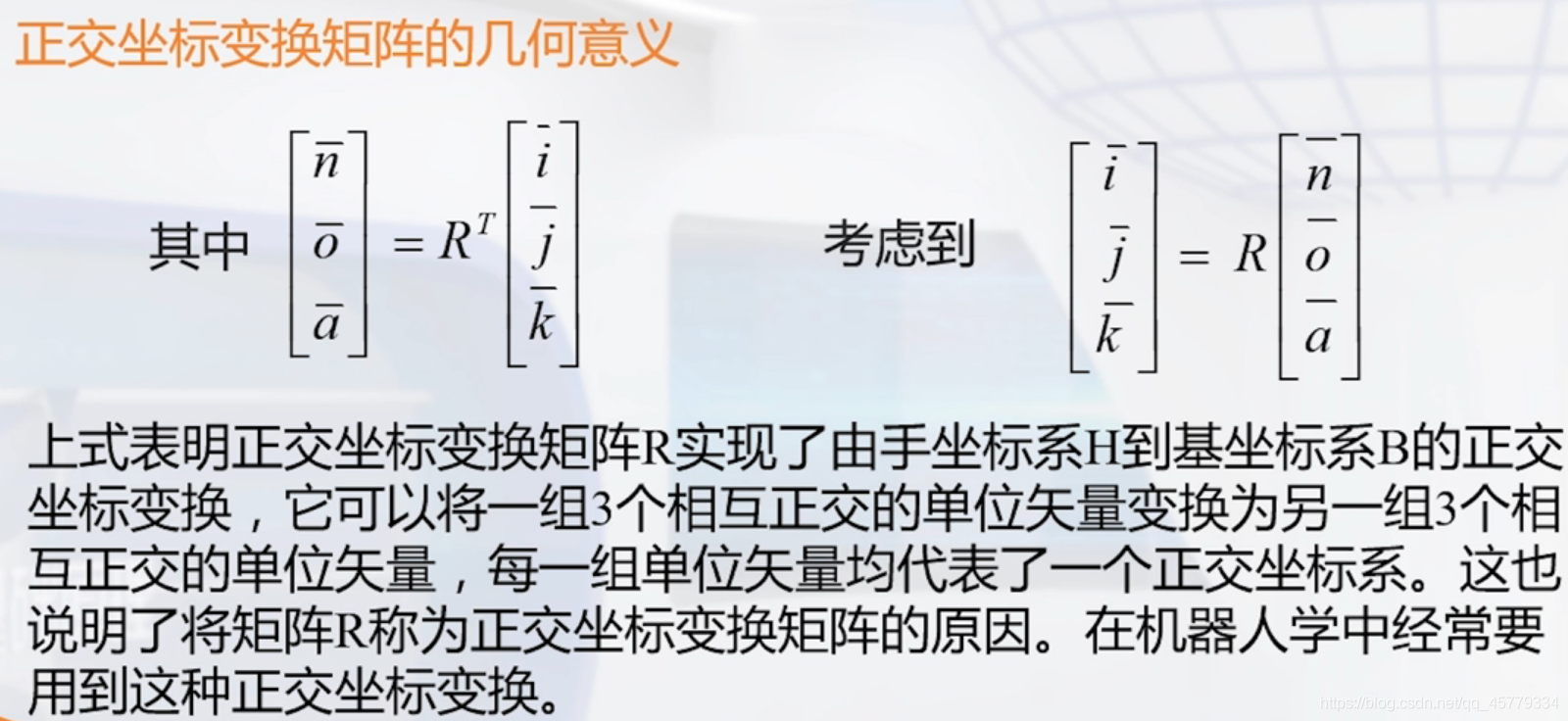
正交坐标变换矩阵的几何意义
2.坐标系平移与旋转变换
(1)坐标系平移
(2)坐标系旋转
变换矩阵
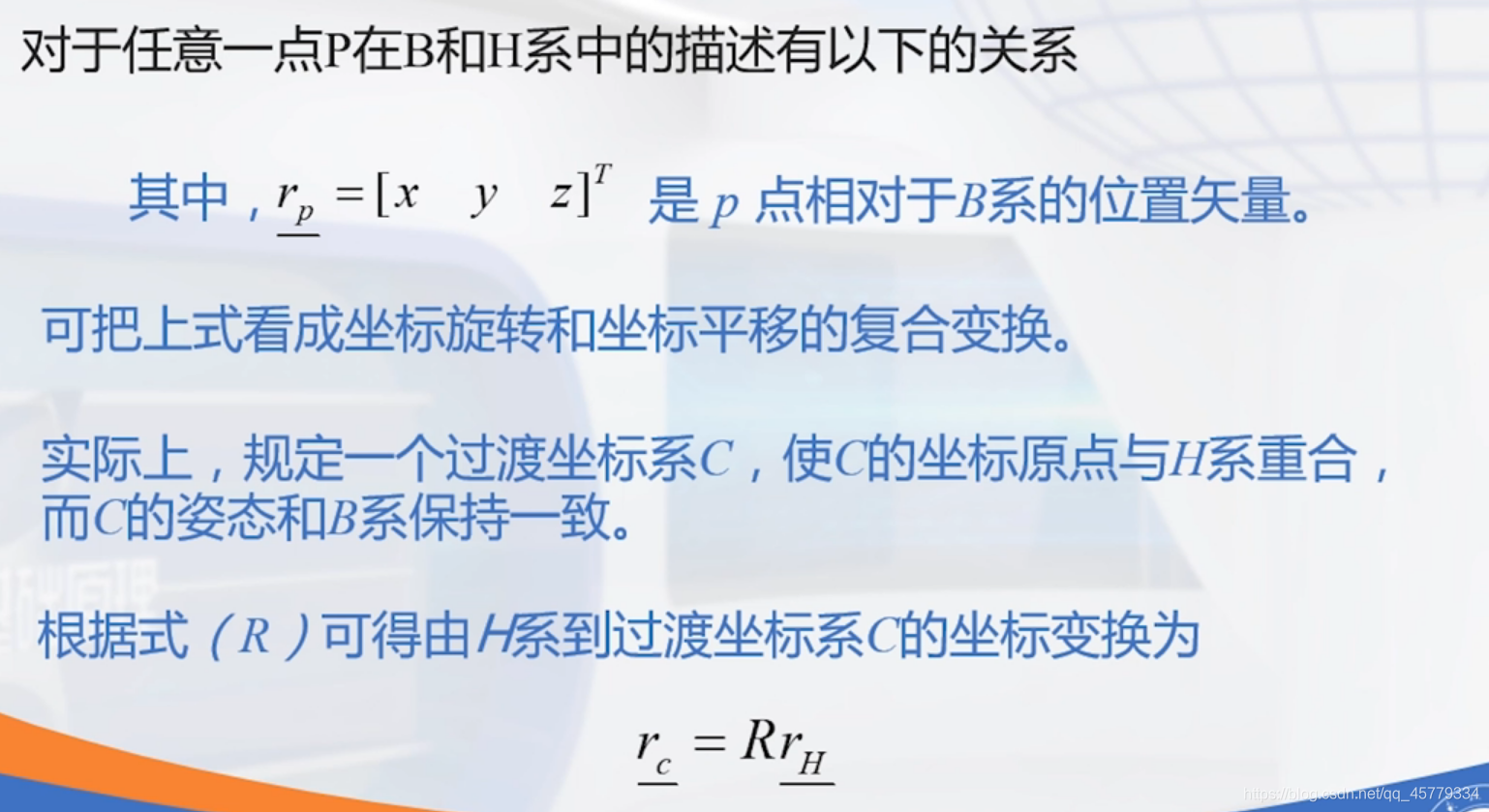
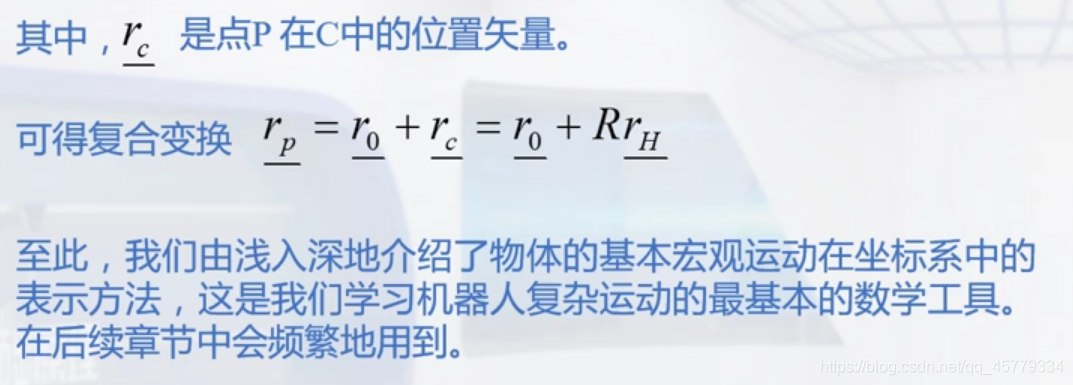
(3)复合变换
复合变换 = 平移+旋转
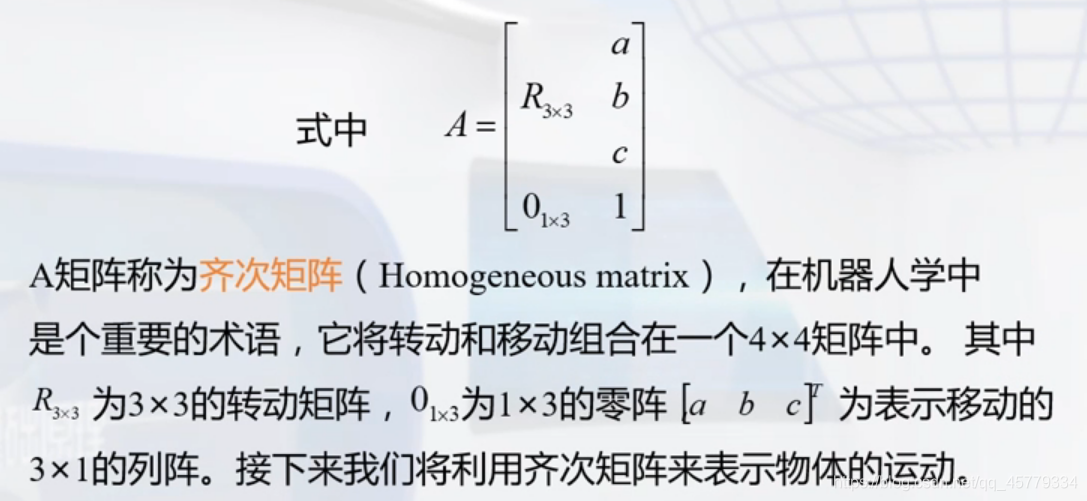
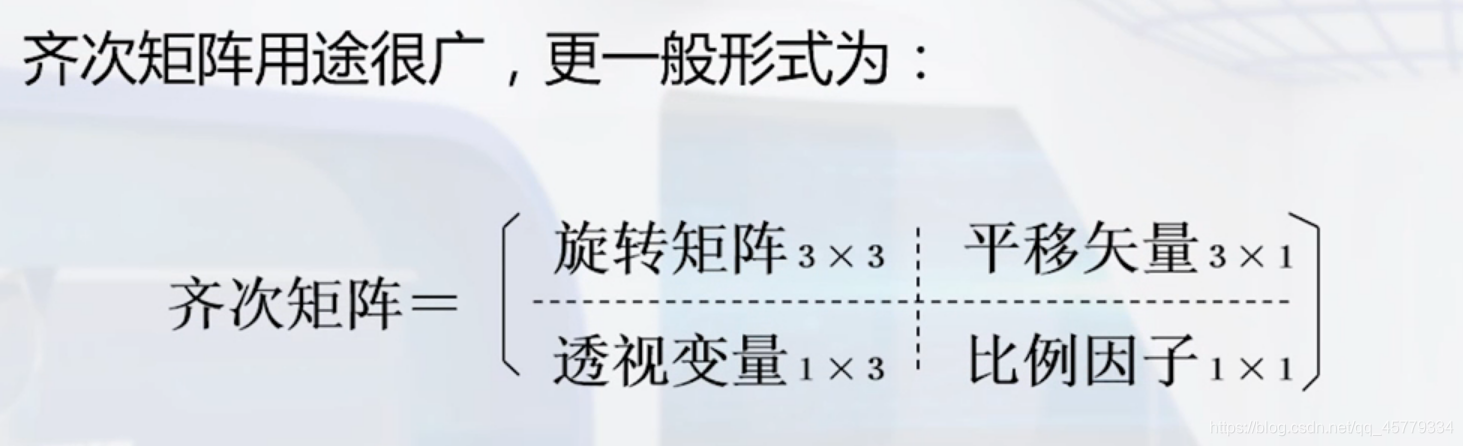
3.机器人的齐次坐标
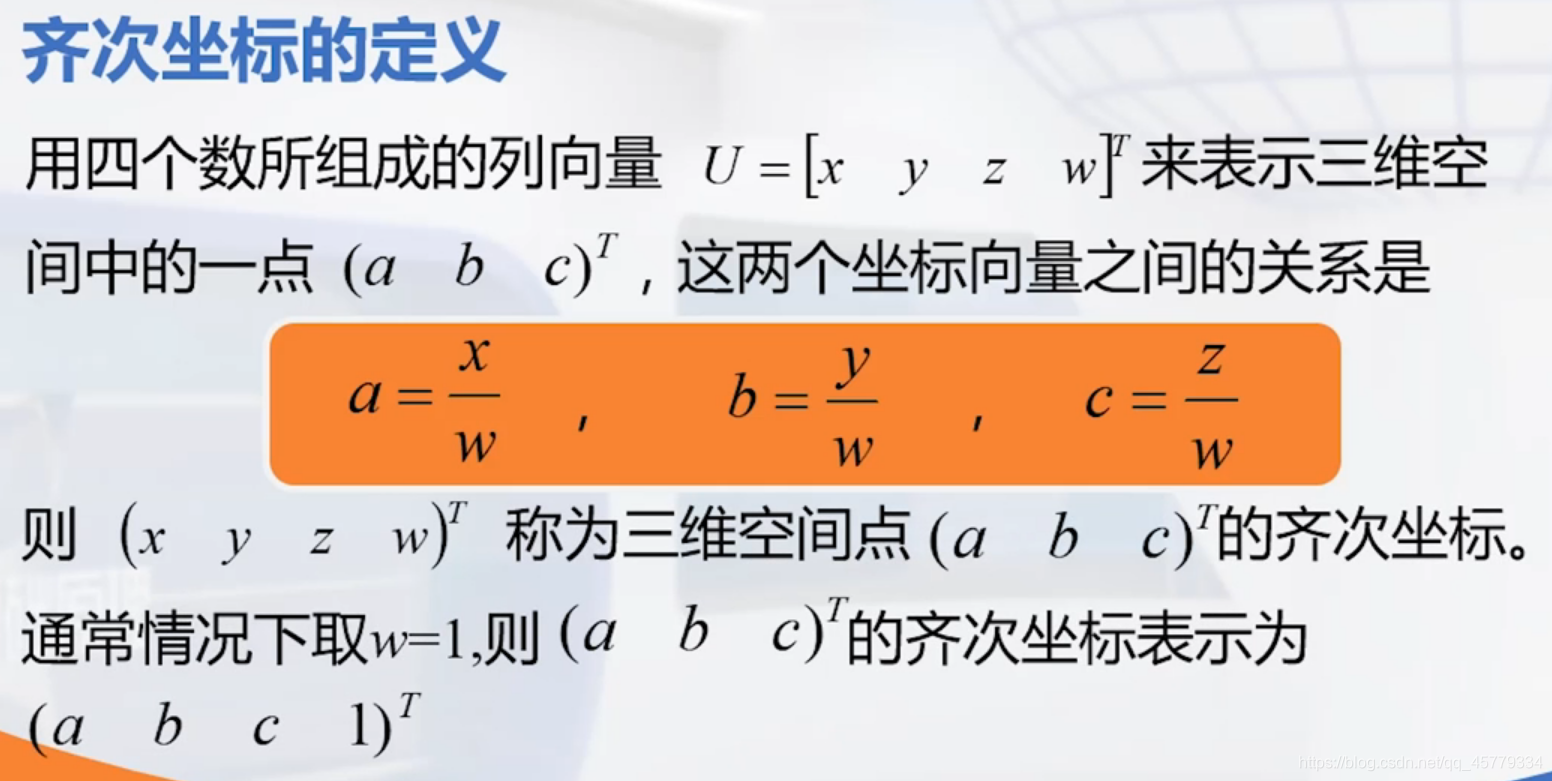
(1)齐次坐标基本概念和性质
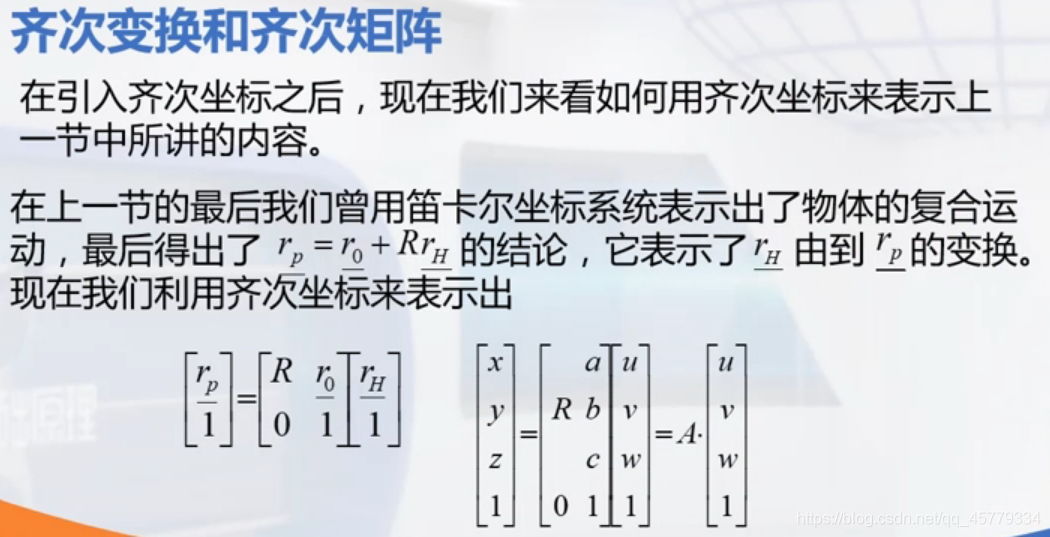
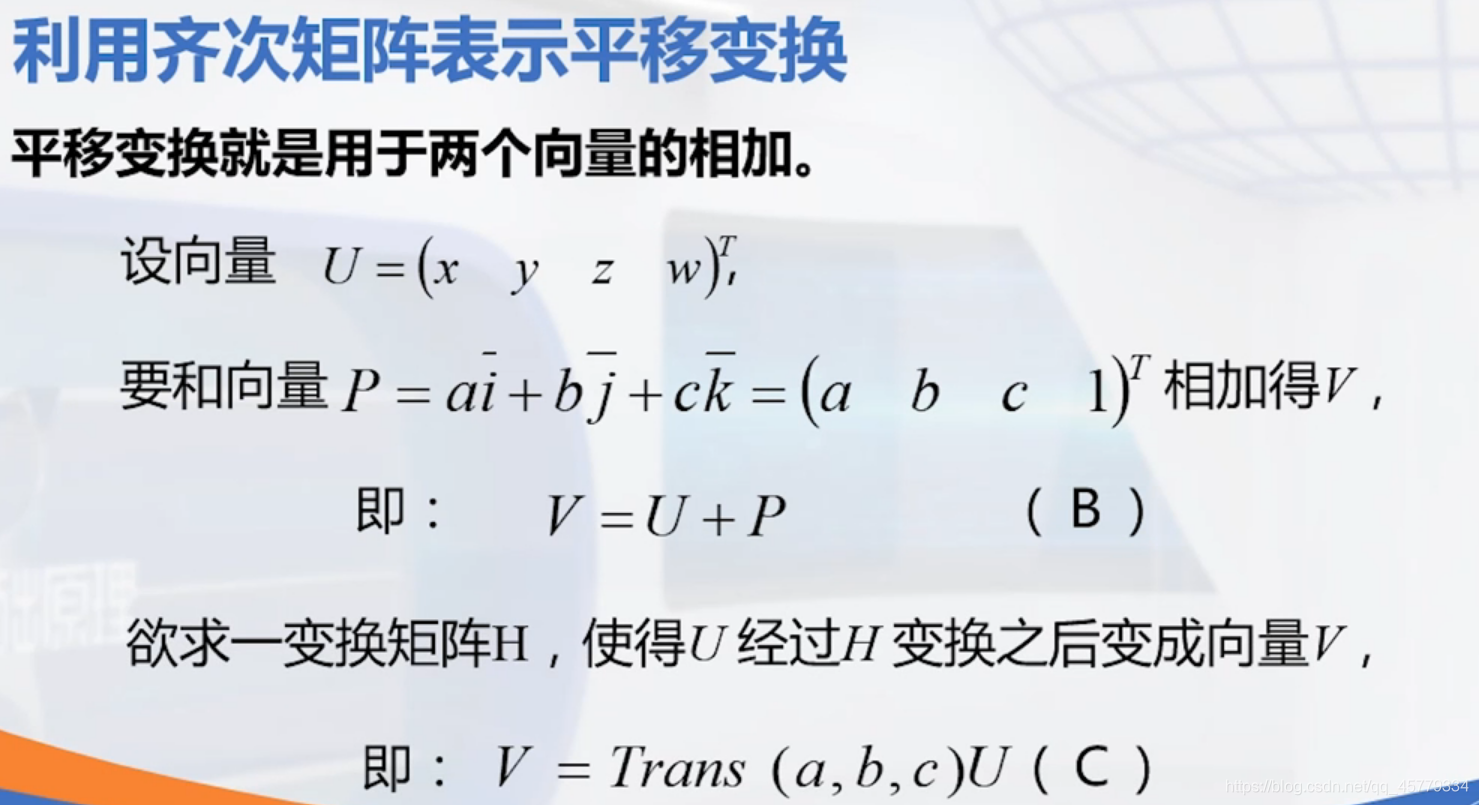
(2)利用齐次变换矩阵表示平移变换
(3)利用齐次变换矩阵表示旋转变换

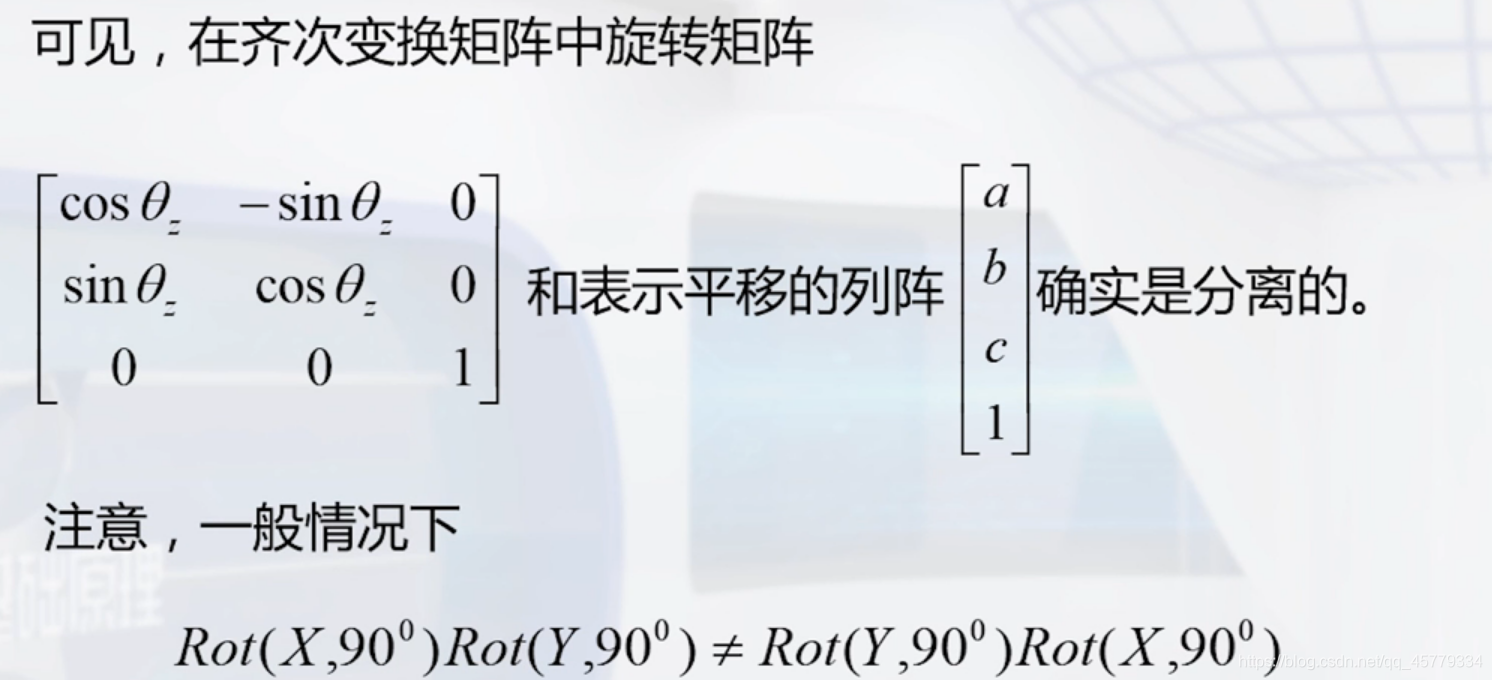
(4)利用齐次变换矩阵表示旋转+平移变换
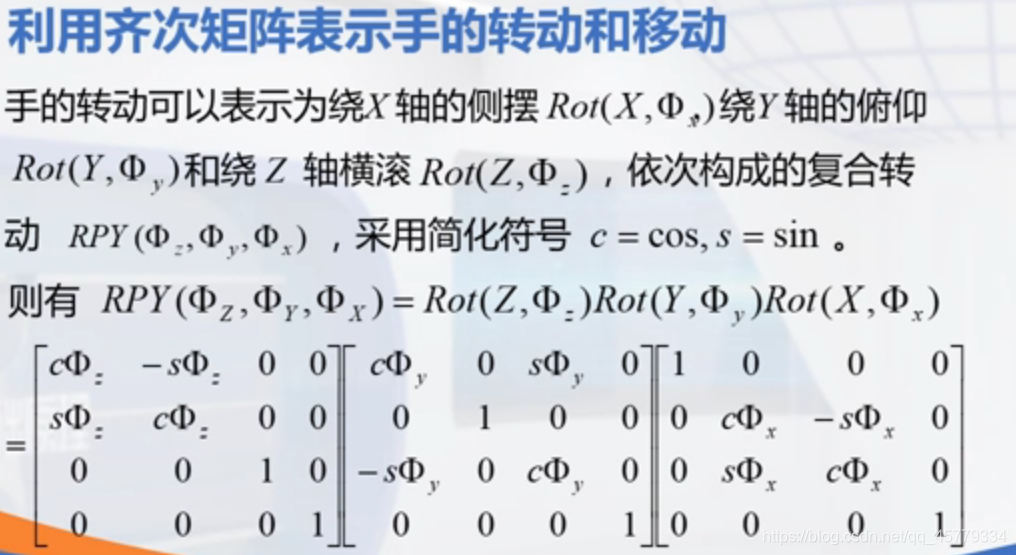
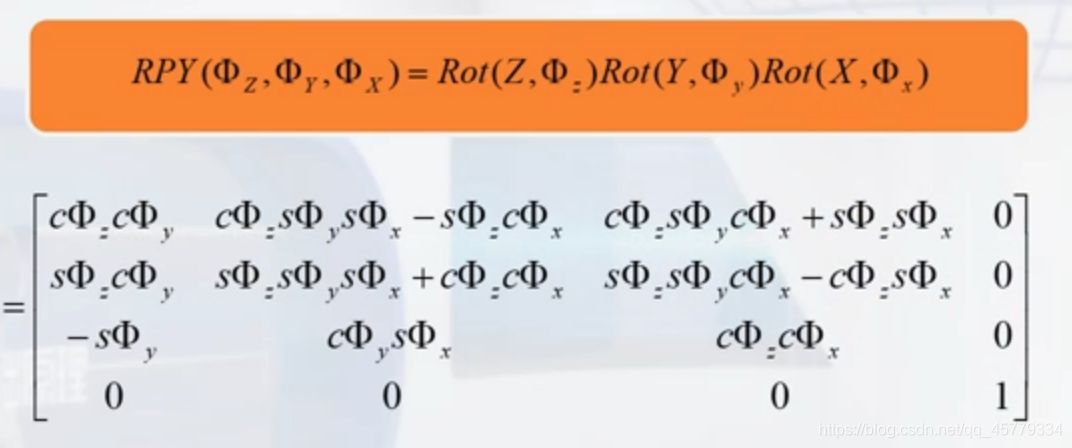
(4)利用齐次变换矩阵表示手的转动和移动
4.机器人的齐次变换
(1)齐次变换的性质
性质一:
性质二:
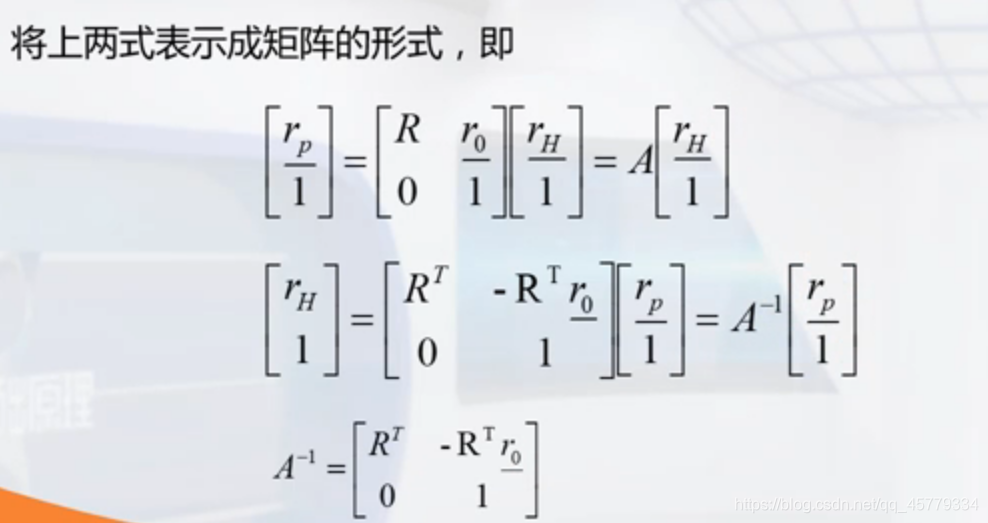
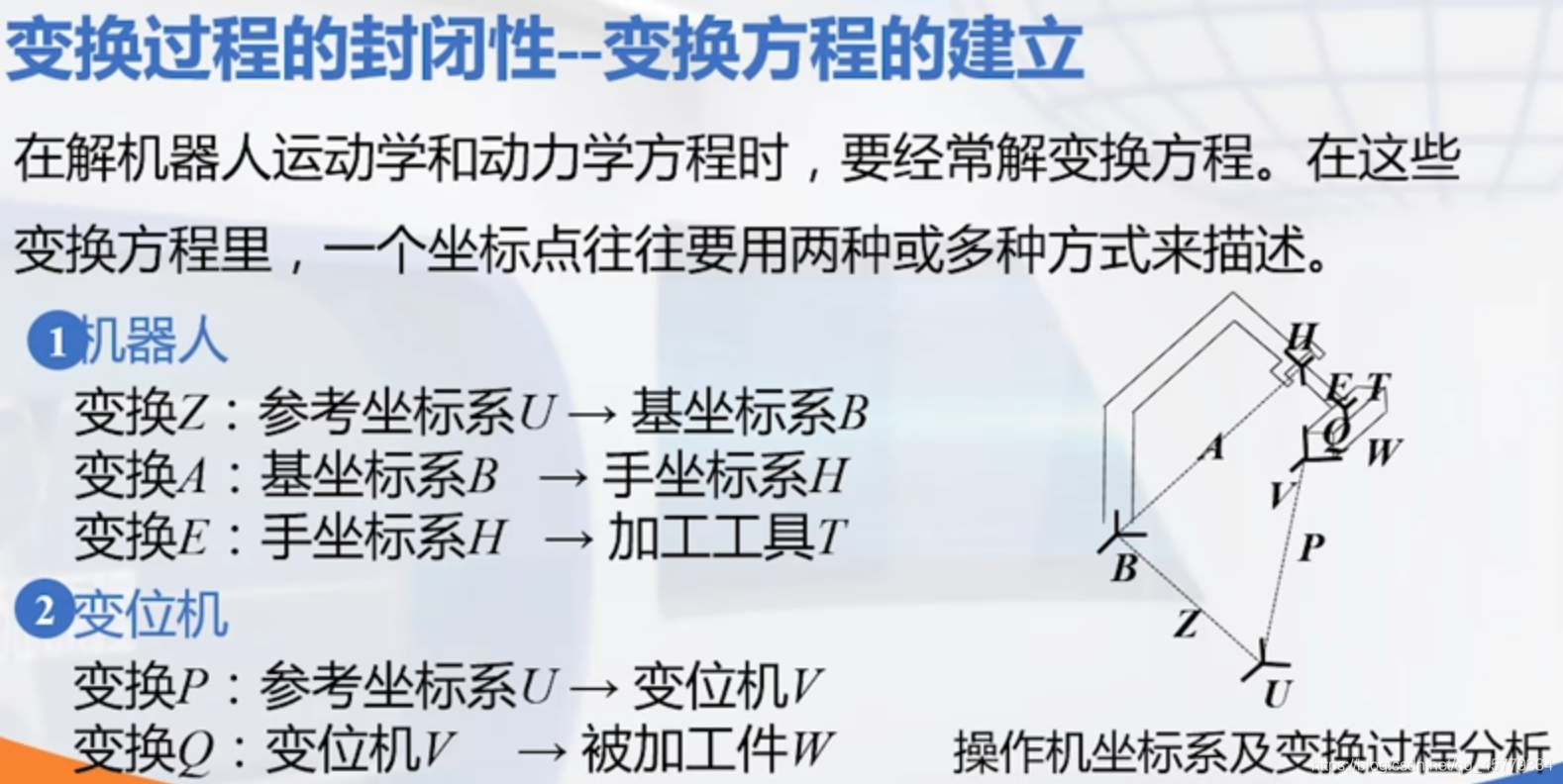
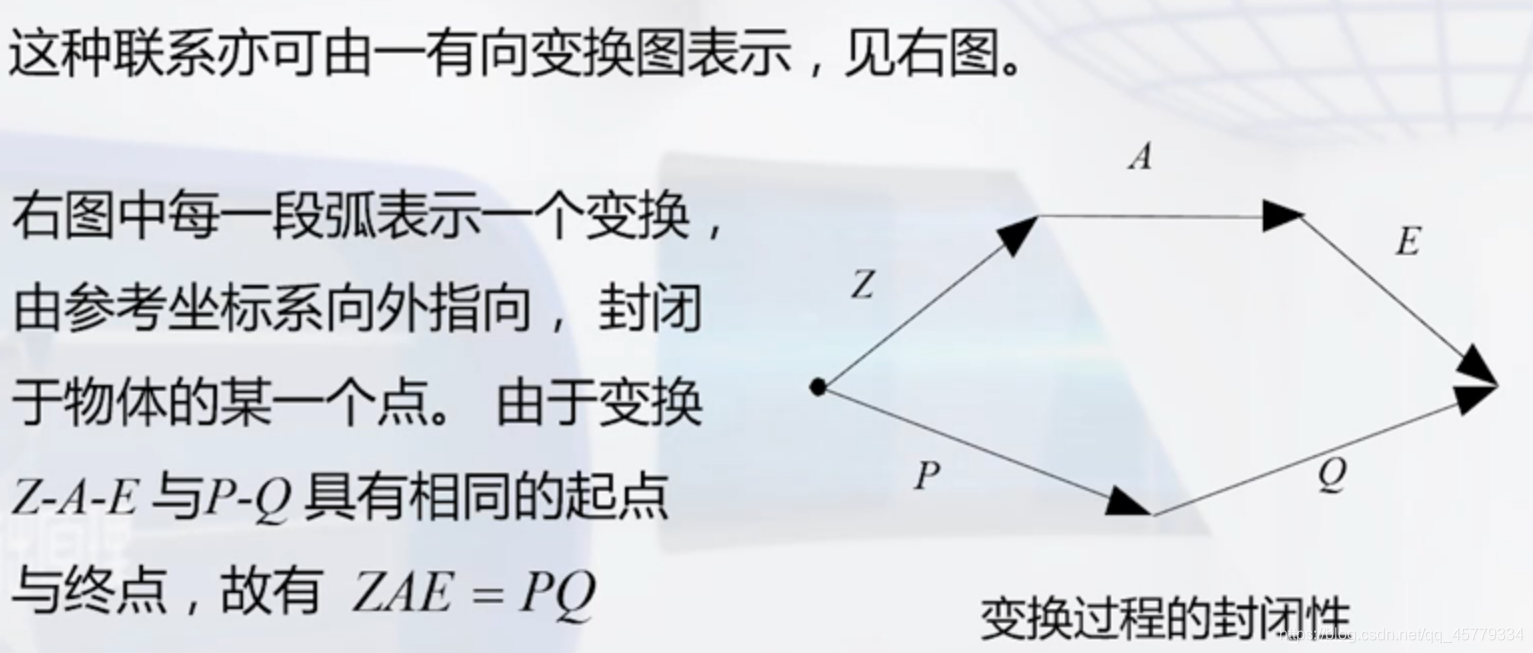
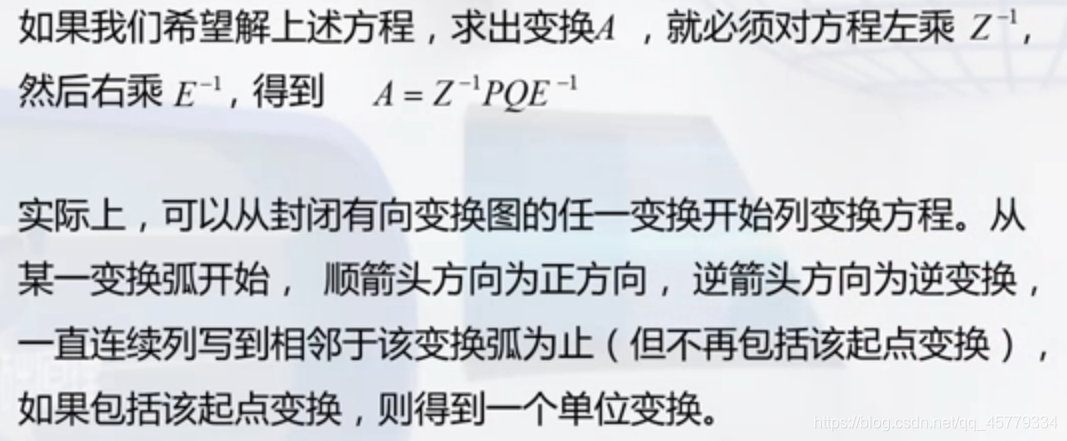
建立变换方程
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!