Convnext实现(pytorch)
概述
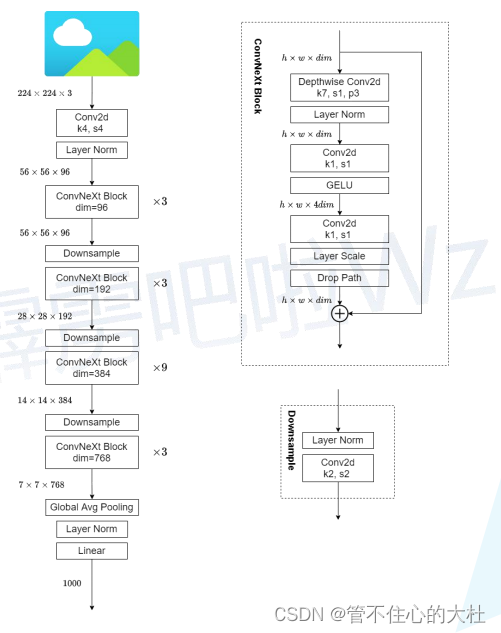
整体:
类似于patchify,使用卷积核大小为4*4,步距为4的卷积层的stem → LN → stage1 → 类似于patchmerging的downsample,使用卷积核大小为2*2,步距为2 → stage2 → ...... → 全局平均池化+LN+Linear。
Block:
DW conv → PW conv(这里用Linear实现)+LN → PW conv → layer scale(对每一个通道的数据进行缩放缩放的比例是可学习的参数)→ drop path+残差
各个版本:
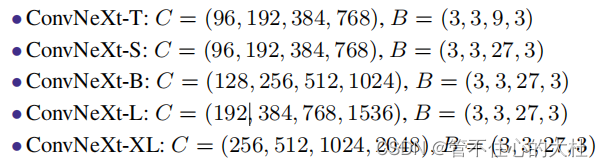
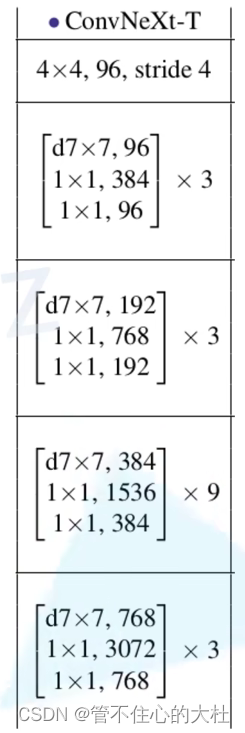
Convnext的几个版本,C代表每个stage的输入通道数,B是每个stage有多少block。
代码
代码非常简单,这里就不多说了。
import torch
import torch.nn as nn
import torch.nn.functional as Fdef drop_path(x, drop_prob: float = 0., training: bool = False):"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).This is the same as the DropConnect impl I created for EfficientNet, etc networks, however,the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper...See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... I've opted forchanging the layer and argument names to 'drop path' rather than mix DropConnect as a layer name and use'survival rate' as the argument."""if drop_prob == 0. or not training:return xkeep_prob = 1 - drop_probshape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNetsrandom_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)random_tensor.floor_() # binarizeoutput = x.div(keep_prob) * random_tensorreturn outputclass DropPath(nn.Module):"""Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks)."""def __init__(self, drop_prob=None):super(DropPath, self).__init__()self.drop_prob = drop_probdef forward(self, x):return drop_path(x, self.drop_prob, self.training)class LayerNorm(nn.Module):r""" 支持两种数据形式: channel在最后 (默认) or channel在最前.channels_last(batch_size, height, width, channels)channels_first(batch_size, channels, height, width)."""def __init__(self, normalized_shape, eps=1e-6, data_format="channels_last"):super().__init__()self.weight = nn.Parameter(torch.ones(normalized_shape), requires_grad=True)self.bias = nn.Parameter(torch.zeros(normalized_shape), requires_grad=True)self.eps = epsself.data_format = data_formatif self.data_format not in ["channels_last", "channels_first"]:raise ValueError(f"not support data format '{self.data_format}'")self.normalized_shape = (normalized_shape,)def forward(self, x: torch.Tensor) -> torch.Tensor:# 如果是channels_last可以直接用官方的layer_normif self.data_format == "channels_last":return F.layer_norm(x, self.normalized_shape, self.weight, self.bias, self.eps)# channel在前,自己搭建一个LNelif self.data_format == "channels_first":# [batch_size, channels, height, width]mean = x.mean(1, keepdim=True)var = (x - mean).pow(2).mean(1, keepdim=True)x = (x - mean) / torch.sqrt(var + self.eps)x = self.weight[:, None, None] * x + self.bias[:, None, None]return xclass Block(nn.Module):r""" ConvNeXt Block. There are two equivalent implementations:(1) DwConv -> LayerNorm (channels_first) -> 1x1 Conv -> GELU -> 1x1 Conv; all in (N, C, H, W)(2) DwConv -> Permute to (N, H, W, C); LayerNorm (channels_last) -> Linear -> GELU -> Linear; Permute backWe use (2) as we find it slightly faster in PyTorchArgs:dim (int): Number of input channels.drop_rate (float): Stochastic depth rate. Default: 0.0layer_scale_init_value (float): Init value for Layer Scale. Default: 1e-6."""def __init__(self, dim, drop_rate=0., layer_scale_init_value=1e-6):super().__init__()self.dwconv = nn.Conv2d(dim, dim, kernel_size=7, padding=3, groups=dim) # depthwise convself.norm = LayerNorm(dim, eps=1e-6, data_format="channels_last")self.pwconv1 = nn.Linear(dim, 4 * dim) # 用Linear等价替换PW convself.act = nn.GELU()self.pwconv2 = nn.Linear(4 * dim, dim)# gamma即layer scale。对每一个通道的数目进行缩放,缩放的比例是可学习的参数,维度和通道数保持一致self.gamma = nn.Parameter(layer_scale_init_value * torch.ones((dim,)),requires_grad=True) if layer_scale_init_value > 0 else Noneself.drop_path = DropPath(drop_rate) if drop_rate > 0. else nn.Identity()def forward(self, x: torch.Tensor) -> torch.Tensor:shortcut = xx = self.dwconv(x)x = x.permute(0, 2, 3, 1) # [N, C, H, W] -> [N, H, W, C]x = self.norm(x)x = self.pwconv1(x)x = self.act(x)x = self.pwconv2(x)if self.gamma is not None:x = self.gamma * xx = x.permute(0, 3, 1, 2) # [N, H, W, C] -> [N, C, H, W]x = shortcut + self.drop_path(x)return xclass ConvNeXt(nn.Module):r""" ConvNeXtA PyTorch impl of : `A ConvNet for the 2020s` -https://arxiv.org/pdf/2201.03545.pdfArgs:in_chans (int): Number of input image channels. Default: 3num_classes (int): Number of classes for classification head. Default: 1000depths (tuple(int)): Number of blocks at each stage. Default: [3, 3, 9, 3]dims (int): Feature dimension at each stage. Default: [96, 192, 384, 768]drop_path_rate (float): Stochastic depth rate. Default: 0.layer_scale_init_value (float): Init value for Layer Scale. Default: 1e-6.head_init_scale (float): Init scaling value for classifier weights and biases. Default: 1."""def __init__(self, in_chans: int = 3, num_classes: int = 1000, depths: list = None,dims: list = None, drop_path_rate: float = 0., layer_scale_init_value: float = 1e-6,head_init_scale: float = 1.):super().__init__()# 与Swin不同,这里将stem也当做下采样,downsample_layers内就是四个stage中的下采样self.downsample_layers = nn.ModuleList()stem = nn.Sequential(nn.Conv2d(in_chans, dims[0], kernel_size=4, stride=4),LayerNorm(dims[0], eps=1e-6, data_format="channels_first"))self.downsample_layers.append(stem)# 对应stage2-stage4前的3个downsamplefor i in range(3):downsample_layer = nn.Sequential(LayerNorm(dims[i], eps=1e-6, data_format="channels_first"),nn.Conv2d(dims[i], dims[i+1], kernel_size=2, stride=2))self.downsample_layers.append(downsample_layer)self.stages = nn.ModuleList() # stagesdp_rates = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))]cur = 0# 构建每个stage中堆叠的block,用*解引用for i in range(4):stage = nn.Sequential(*[Block(dim=dims[i], drop_rate=dp_rates[cur + j], layer_scale_init_value=layer_scale_init_value)for j in range(depths[i])])self.stages.append(stage)# cur用于drop pathcur += depths[i]self.norm = nn.LayerNorm(dims[-1], eps=1e-6) # final norm layerself.head = nn.Linear(dims[-1], num_classes)self.apply(self._init_weights)self.head.weight.data.mul_(head_init_scale)self.head.bias.data.mul_(head_init_scale)def _init_weights(self, m):if isinstance(m, (nn.Conv2d, nn.Linear)):nn.init.trunc_normal_(m.weight, std=0.2)nn.init.constant_(m.bias, 0)def forward_features(self, x: torch.Tensor) -> torch.Tensor:for i in range(4):x = self.downsample_layers[i](x)x = self.stages[i](x)return self.norm(x.mean([-2, -1])) # global average pooling, (N, C, H, W) -> (N, C)def forward(self, x: torch.Tensor) -> torch.Tensor:x = self.forward_features(x)x = self.head(x)return xdef convnext_tiny(num_classes: int):# https://dl.fbaipublicfiles.com/convnext/convnext_tiny_1k_224_ema.pthmodel = ConvNeXt(depths=[3, 3, 9, 3],dims=[96, 192, 384, 768],num_classes=num_classes)return modelconvnext_tiny()本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!