ROS2基础--C++
一、新建工作空间
//设置ROS2的环境变量。
source /opt/ros/humble/setup.bash //找不到包时可以通过此命令找到//创建新的工作空间
mkdir -p ~/my_work_place/src
cd ~/my_work_place/src
//放置样例代码
git clone https://github.com/ros/ros_tutorials.git -b humble-devel
//查看包结构
~/my_work_place/src$ ls ros_tutorials/
roscpp_tutorials rospy_tutorials ros_tutorials turtlesim
//解决依赖问题
rosdep install -i --from-path src --rosdistro humble -y//在工作空间的根目录my_work_place下编译代码
colcon build
*编译工具安装:sudo apt install python3-colcon-common-extensions
* colcon build后边还可以跟一些常用的参数: --packages-up-to :编译指定的功能包,而不是整个工作空间;--symlink-install :节省每次重建python脚本的时间;--event-handlers console_direct+ :在终端中显示编译过程中的详细日志;//重新打开一个终端,然后来设置my_work_place工作空间的环境变量
cd ~/my_work_place
. install/local_setup.sh
* install里有两个很类似的文件:local_setup.sh和setup.sh;
* 前者仅会设置当前工作空间中功能包的相关环境变量,后者还会设置该工作空间下其他底层工作空间的环境变量。
或者用(. install/setup.bash)
二、新建ros2包
cd ~/my_work_place/src//新建名为my_package的包
ros2 pkg create --build-type ament_cmake --node-name my_node my_package
*--node-name为可选参数;//回工作空间目录编译
cd ..
colcon build
//单独编译一个包:colcon build --package-select my_package//刷新环境变量
. install/setup.bash//运行功能包
ros2 run my_package my_node三、订阅和发布
1、发布
//新建包cpp_pubsub
cd ~/my_workplace/src
ros2 pkg create --build-type ament_cmake cpp_pubsub//创建cpp文件
cd cpp_pubsub/src
gedit publisher_member_function.cpp
//publisher_member_function的C++代码
#include //编写package.xml,添加依赖
<depend>rclcppdepend>
<depend>std_msgsdepend>
//编写CMakelist.txt,添加依赖
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)install(TARGETStalkerDESTINATION lib/${PROJECT_NAME})
//安装相关依赖
cd ~/my_work_place/
rosdep install -i --from-path src --rosdistro humble -y//编译
colcon build --symlink-install --packages-select cpp_pubsub//刷新环境变量
. install/setup.bash//运行发布程序
ros2 run cpp_pubsub talker
2、订阅
cd ~/my_work_place/src/cpp_pubsub/src
gedit subscriber_member_function.cpp
#include cd ~/my_work_place///安装相关依赖
rosdep install -i --from-path src --rosdistro humble -y//编译包
colcon build --symlink-install --packages-select cpp_pubsub//刷新环境变量
. install/setup.bash//运行订阅程序
ros2 run cpp_pubsub listener
四、服务端和客户端
1、服务端
cd ~/my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_srvcli --dependencies rclcpp example_interfacescd cpp_srvcli/src
gedit add_two_ints_server.cpp
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"#include //修改CMakeLists.txt,增加如下行
add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(server rclcpp example_interfaces)install(TARGETSserverDESTINATION lib/${PROJECT_NAME})
2、客户端
cd cpp_srvcli/src
gedit add_two_ints_client.cpp
#include "rclcpp/rclcpp.hpp"
#include "example_interfaces/srv/add_two_ints.hpp"#include //编写CMakelist.txt文件
cmake_minimum_required(VERSION 3.5)
project(cpp_srvcli)find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(example_interfaces REQUIRED)add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(serverrclcpp example_interfaces)add_executable(client src/add_two_ints_client.cpp)
ament_target_dependencies(clientrclcpp example_interfaces)install(TARGETSserverclientDESTINATION lib/${PROJECT_NAME})ament_package()
//安装依赖包
rosdep install -i --from-path src --rosdistro<distro> -y//编译
colcon build --package-select cpp_srvcli
//运行服务端
cd ~/my_work_place
. install/setup.bash
ros2 run cpp_srvcli server//运行客户端
cd ~/my_work_place
. /install/setup.bash
ros2 run cpp_srvcli client 2 3
五、创建消息(msg)文件
cd ~/my_work_place
ros2 pkg create --build-type ament_cmake tutorial_interfaces
cd ~/tutorial_interfaces
mkdir msg
cd msg
gedit Num.msg
//Num.msg文件内容
int64 num //定义了一个64为的整数
//编辑CMakelist.txt,添加下面几行
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}"msg/Num.msg")
//编辑package.xml,增加下面几行
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>
//编译
cd ~/my_work_place
colcon build --symlink-install --packages-select tutorial_interfaces
. install/setup.bash
//查询消息接口信息
ros2 interface show tutorial_interfaces/msg/Num
测试,使用cpp_pubsub包的发布与订阅;
//复制publisher_member_function.cpp到publisher_member_function_num.cpp
cd ~/my_work_place/src/cpp_pubsub/src
cp publisher_member_function.cpp publisher_member_function_num.cpp
//发布改版
#include cp subscriber_member_function.cpp subscriber_member_function_num.cpp
#include //修改CMakelist.txt
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tutorial_interfaces REQUIRED) # CHANGEadd_executable(talker_num src/publisher_member_function_num.cpp) # CHANGE
ament_target_dependencies(talker_num rclcpp tutorial_interfaces) # CHANGEadd_executable(listener_num src/subscriber_member_function_num.cpp) # CHANGE
ament_target_dependencies(listener_num rclcpp tutorial_interfaces) # CHANGEinstall(TARGETStalkerlistenertalker_num # CHANGElistener_num # CHANGEDESTINATION lib/${PROJECT_NAME})ament_package()
//修改package.xml,增加如下代码
<depend>tutorial_interfacesdepend>
//编译
cd ~/my_work_place
colcon build --package-select cpp_pubsub//运行
ros2 run cpp_pubsub talker_num
ros2 run cpp_pubsub listener_num
六、创建服务(srv)文件
//创建一个包,这我使用之前创建的
cd ~/my_work_place/src
ros2 pkg create --build-type ament_cmake tutorial_interfaces
cd ~/tutorial_interfaces
mkdir srv
cd srv
gedit AddThreeInts.srv
//定义a b c三个输入,输出sum,都是整数
int64 a
int64 b
int64 c
---
int64 sum
//编辑CMakeLists.txt,增加如下行
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}"srv/AddThreeInts.srv")
//编辑package.xml,增加如下行
<build_depend>rosidl_default_generatorsbuild_depend>
<exec_depend>rosidl_default_runtimeexec_depend>
<member_of_group>rosidl_interface_packagesmember_of_group>
//编译
cd ~/my_work_place
colcon build --symlink-install --packages-select tutorial_interfaces
. install/srtup.bash
//查询消息接口
ros2 interfaces show tutorial_interfaces/srv/AddThreeInts
测试,使用之前的cpp_pubsub包的发布;
//修改服务端,新建文件_srv
gedit add_two_ints_server_srv.cpp
#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/srv/add_three_ints.hpp" // CHANGE#include //修改客户端,新建文件_srv
gedit add_two_ints_server_srv.cpp
#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/srv/add_three_ints.hpp" // CHANGE#include //修改CMakelist.txtfind_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tutorial_interfaces REQUIRED) # CHANGEadd_executable(server_srv src/add_two_ints_server_srv.cpp)
ament_target_dependencies(server_srvrclcpp tutorial_interfaces) #CHANGEadd_executable(client_srv src/add_two_ints_client_srv.cpp)
ament_target_dependencies(client_srvrclcpp tutorial_interfaces) #CHANGEinstall(TARGETSserver_srvclient_srvDESTINATION lib/${PROJECT_NAME})ament_package()
//修改package.xml 增加依赖
<depend>tutorial_interfacesdepend>
//编译
colcon build --packages-select cpp_srvcli//运行
ros2 run cpp_srvcli server_srv
ros2 run cpp_srvcli client_srv 2 3 4
七、创建ros2接口
//以创建一个msg类型的接口为例
cd ~/my_work_place/src
ros2 pkg create --build-type ament_cmake more_interfaces
mkdir more_interfaces/msg
gedit AddressBook.msg
bool FEMALE=true
bool MALE=falsestring first_name
string last_name
bool gender
uint8 age
string address
//在package.xml中添加如下代码
<buildtool_depend>rosidl_default_generatorsbuildtool_depend>
<exec_depend>rosidl_default_runtimeexec_depend>
<member_of_group>rosidl_interface_packagesmember_of_group>
//在CMakelist.txt添加如下代码
find_package(rosidl_default_generators REQUIRED)set(msg_files"msg/AddressBook.msg"
)rosidl_generate_interfaces(${PROJECT_NAME}${msg_files}
)ament_export_dependencies(rosidl_default_runtime)
//在src目录下,新建publish_address_book.cpp
gedit publish_address_book.cpp
#include //修改CMakelist.txt 增加如下内容:
find_package(rclcpp REQUIRED)add_executable(publish_address_booksrc/publish_address_book.cpp
)ament_target_dependencies(publish_address_book"rclcpp"
)install(TARGETS publish_address_bookDESTINATION lib/${PROJECT_NAME})rosidl_target_interfaces(publish_address_book${PROJECT_NAME} "rosidl_typesupport_cpp")
//编译
cd ~/my_work_place
colcon run build --packages-up-to more_interfaces
. install/setup.bash
ros2 run more_interfaces publish_address_book
//打开新终端,查看topic
. install/setup.bash
ros2 topic echo /address_book
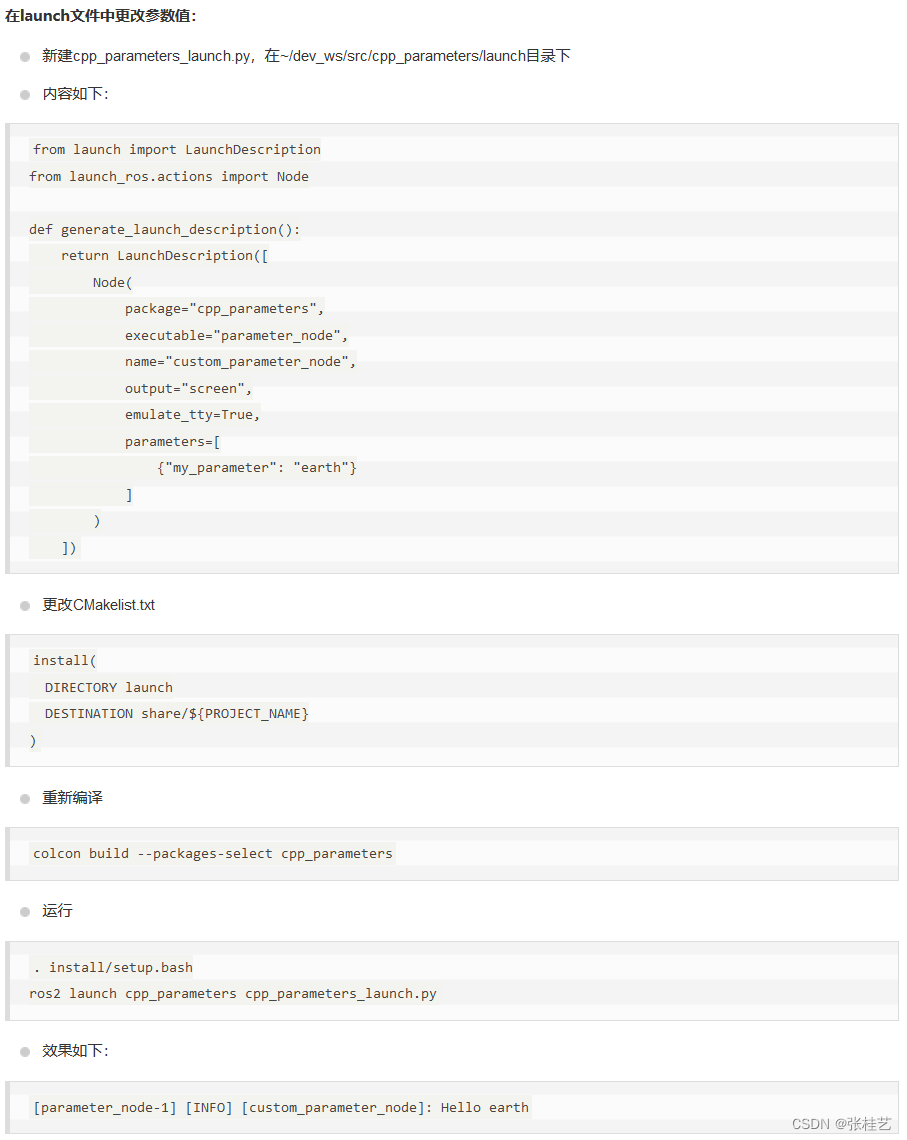
八、在ros2中使用参数
cd ~/my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_parameters --dependencies rclcpp
mkdir cpp_parameters/src
gedit cpp_parameters_node.cpp
#include //修改CMakeLists.txt
add_executable(parameter_node src/cpp_parameters_node.cpp)
ament_target_dependencies(parameter_node rclcpp)install(TARGETSparameter_nodeDESTINATION lib/${PROJECT_NAME}
)
//安装依赖
cd ~/my_work_place
rosdep install -i --from-path src --rosdistro humble -y//编译
colcon build --packages-select cpp_parameters
. install/setup.bash//运行
ros2 run cpp_parameters parameter_node//查看值,get命令
ros2 param get /parameter_node my_parameter
//在终端下更改参数值,set命令
ros2 param list
ros2 param set /parameter_node my_parameter earth
//再次查看
ros2 param get /parameter_node my_parameter
九、创建和使用插件(plugin)
因为很多时候我们需要对产品进行包装,核心的代码是只留下输入输出接口的,所以我们使用plugin来实现 .so文件 的封装以及动态调取。
实现一个插件主要需要以下几个步骤:
- 创建基类,定义统一的接口;如果是基于现有的基类实现plugin,则不需要这个步骤
- 创建plugin类,继承基类,实现统一的接口;
- 注册插件;
- 编译生成插件的动态链接库;
- 将插件加入ROS系统;
//安装pluginlib
sudo apt-get install ros-humble-pluginlib
//创建一个新包,基类
cd my_work_place/src
ros2 pkg create --build-type ament_cmake polygon_base --dependencies pluginlib --node-name area_node
//编辑文件,这里创建了个RegularPolygon抽象基类,后边的插件类就是继承该类
gedit polygon_base/include/polygon_base/regular_polygon.hpp
#ifndef POLYGON_BASE_REGULAR_POLYGON_HPP
#define POLYGON_BASE_REGULAR_POLYGON_HPPnamespace polygon_base
{class RegularPolygon{public:virtual void initialize(double side_length) = 0;virtual double area() = 0;virtual ~RegularPolygon(){}protected:RegularPolygon(){}};
} // namespace polygon_base#endif // POLYGON_BASE_REGULAR_POLYGON_HPP
//在my_work_place/src/polygon_base/CMakeLists.txt添加如下代码,要在ament_target_dependencies命令后添加以下行
install(DIRECTORY include/DESTINATION include
)//在命令之前添加此ament_package命令
ament_export_include_directories(include
)
//在基类的基础上创建插件包(继承)
cd my_work_place/src
ros2 pkg craete --build-type ament_cmake polygon_plugins --dependencies polygon_base pluginlib --library-name polygon_plugins//编写c++文件
gedit my_work_place/src/polygon_plugins/src/polygon_plugins.cpp
#include 这里创建了两个继承自基础类RegularPolygon的插件子类Triangle和Square。
//在plugins.xml添加以下内容
<library path="polygon_plugins"><class type="polygon_plugins::Square" base_class_type="polygon_base::RegularPolygon"><description>This is a square plugin.description>class><class type="polygon_plugins::Triangle" base_class_type="polygon_base::RegularPolygon"><description>This is a triangle plugin.description>class>library>
//在polygon_plugins/CMakelist.txt添加以下内容
add_library(polygon_plugins src/polygon_plugins.cpp)
target_include_directories(polygon_plugins PUBLIC
<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
<INSTALL_INTERFACE:include>)
ament_target_dependencies(polygon_pluginspolygon_basepluginlib
)pluginlib_export_plugin_description_file(polygon_base plugins.xml)install(TARGETS polygon_pluginsEXPORT export_${PROJECT_NAME}ARCHIVE DESTINATION libLIBRARY DESTINATION libRUNTIME DESTINATION bin
)//在ament_package命令之前添加以下内容
ament_export_libraries(polygon_plugins
)
ament_export_targets(export_${PROJECT_NAME}
)
//使用插件
//新建文件area_node.cpp
#include cd my_work_place
//colcon命令选中了polgon_base包和他的应用基类包polgon_plugins
colcon build --packages-select polygon_base polygon_plugins
. install/setup.bashros2 run polygon_base area_node
十、动作服务端&客户端(action)
1、服务端(action-server)
cd my_work_place/src
ros2 pkg create --dependences action_tutorials_interfaces rclcpp rclcpp_action rclcpp_components --action_tutorials_cpp//添加可见性控制,在action_tutorials_cpp/include/action_tutorials_cpp/visibility_control.h添加以下内容
#ifndef ACTION_TUTORIALS_CPP__VISIBILITY_CONTROL_H_
#define ACTION_TUTORIALS_CPP__VISIBILITY_CONTROL_H_#ifdef __cplusplus
extern "C"
{
#endif// This logic was borrowed (then namespaced) from the examples on the gcc wiki:
// https://gcc.gnu.org/wiki/Visibility#if defined _WIN32 || defined __CYGWIN__#ifdef __GNUC__#define ACTION_TUTORIALS_CPP_EXPORT __attribute__ ((dllexport))#define ACTION_TUTORIALS_CPP_IMPORT __attribute__ ((dllimport))#else#define ACTION_TUTORIALS_CPP_EXPORT __declspec(dllexport)#define ACTION_TUTORIALS_CPP_IMPORT __declspec(dllimport)#endif#ifdef ACTION_TUTORIALS_CPP_BUILDING_DLL#define ACTION_TUTORIALS_CPP_PUBLIC ACTION_TUTORIALS_CPP_EXPORT#else#define ACTION_TUTORIALS_CPP_PUBLIC ACTION_TUTORIALS_CPP_IMPORT#endif#define ACTION_TUTORIALS_CPP_PUBLIC_TYPE ACTION_TUTORIALS_CPP_PUBLIC#define ACTION_TUTORIALS_CPP_LOCAL
#else#define ACTION_TUTORIALS_CPP_EXPORT __attribute__ ((visibility("default")))#define ACTION_TUTORIALS_CPP_IMPORT#if __GNUC__ >= 4#define ACTION_TUTORIALS_CPP_PUBLIC __attribute__ ((visibility("default")))#define ACTION_TUTORIALS_CPP_LOCAL __attribute__ ((visibility("hidden")))#else#define ACTION_TUTORIALS_CPP_PUBLIC#define ACTION_TUTORIALS_CPP_LOCAL#endif#define ACTION_TUTORIALS_CPP_PUBLIC_TYPE
#endif#ifdef __cplusplus
}
#endif#endif // ACTION_TUTORIALS_CPP__VISIBILITY_CONTROL_H_
//编写动作服务器代码
#include //编译动作服务器,在action_tutorials_cpp/CMakeLists.txt添加以下内容
//并在find_package调用后添加以下内容add_library(action_server SHAREDsrc/fibonacci_action_server.cpp)
target_include_directories(action_server PRIVATE$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>$<INSTALL_INTERFACE:include>)
target_compile_definitions(action_serverPRIVATE "ACTION_TUTORIALS_CPP_BUILDING_DLL")
ament_target_dependencies(action_server"action_tutorials_interfaces""rclcpp""rclcpp_action""rclcpp_components")
rclcpp_components_register_node(action_server PLUGIN "action_tutorials_cpp::FibonacciActionServer" EXECUTABLE fibonacci_action_server)
install(TARGETSaction_serverARCHIVE DESTINATION libLIBRARY DESTINATION libRUNTIME DESTINATION bin)
cd my_work_place
. install/setup.bashros2 run action_tutorials_cpp fibonacci_action_server
2、客户端(action-client)
cd my_work_place/src/action_tutorials_cpp/src
gedit fibonacci_action_client.cpp
#include //在action_tutorials_cpp/CMakeLists.txt添加以下内容
add_library(action_client SHAREDsrc/fibonacci_action_client.cpp)
target_include_directories(action_client PRIVATE$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>$<INSTALL_INTERFACE:include>)
target_compile_definitions(action_clientPRIVATE "ACTION_TUTORIALS_CPP_BUILDING_DLL")
ament_target_dependencies(action_client"action_tutorials_interfaces""rclcpp""rclcpp_action""rclcpp_components")
rclcpp_components_register_node(action_client PLUGIN "action_tutorials_cpp::FibonacciActionClient" EXECUTABLE fibonacci_action_client)
install(TARGETSaction_clientARCHIVE DESTINATION libLIBRARY DESTINATION libRUNTIME DESTINATION bin)
//编译
cd my_work_place
colcon build//运行
ros2 run action_tutorials_cpp fibonacci_action_client
十一、Topic Statistics查看话题
//以cpp_pubsub为示例
cd my_work_place/src/cpp_pubsub/src
//下载示例
wget -O member_function_with_topic_statistics.cpp https://raw.githubusercontent.com/ros2/examples/master/rclcpp/topics/minimal_subscriber/member_function_with_topic_statistics.cpp
//编辑下载的文件
#include //编写CMakelist.txt文件,添加如下代码
add_executable(listener_with_topic_statistics member_function_with_topic_statistics.cpp)
ament_target_dependencies(listener_with_topic_statistics rclcpp std_msgs)install(TARGETStalkerlistenerlistener_with_topic_statisticsDESTINATION lib/${PROJECT_NAME})
//运行发布端
ros2 run cpp_pubsub talker
//使用统计信息的节点运行订阅端
ros2 run cpp_pubsub listener_with_topic_statistics
十二、增加头文件(.h文件)
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_header
cd cpp_header/include/cpp_header
gedit minimal_publisher.hpp
#include cd my_work_place/src/cpp_header/src
gedit minimal_publisher.cpp
#include "cpp_header/minimal_publisher.hpp"MinimalPublisher::MinimalPublisher ()
: Node("minimal_publisher"), count_(0)
{ publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);timer_ = this->create_wall_timer(500ms, std::bind(&MinimalPublisher::timer_callback, this));
}void MinimalPublisher::timer_callback()
{auto message = std_msgs::msg::String();message.data = "Hello, world! " + std::to_string(count_++);RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());publisher_->publish(message);}
cd my_work_place/src/cpp_header/src
gedit minimal_publisher_node.cpp
#include "cpp_header/minimal_publisher.hpp"int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<MinimalPublisher>());rclcpp::shutdown();return 0;
}
//编辑package.xml,在<buildtool_depend>ament_cmakebuildtool_depend>后增加
<depend>rclcppdepend>
<depend>std_msgsdepend>
//编辑 CMakelist.txt
//在find_package(ament_cmake REQUIRED)后增加
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)//再增加可执行文件,ros2 run能够调用的名称
include_directories(include)
add_executable(talker src/minimal_publisher_node.cpp src/minimal_publisher.cpp)
ament_target_dependencies(talker rclcpp std_msgs)//增加可执行文件位置,ros2 run可以找到这个可执行文件
install(TARGETStalkerDESTINATION lib/${PROJECT_NAME})
//安装相关依赖
cd my_work_place
rosdep install -i --from-path src --rosdistro galactic -y//编译包
colcon build --symlink-install --packages-select cpp_header//加载工作空间
. install/setup.bash//执行
ros2 run cpp_header talker
十二、在C++包里增加python支持
cd my_work_place/src
ros2 pkg craete my_cpp_py_pkg --build-type ament_cmake//增加cpp节点和头文件
cd my_cpp_py_pkg
gedit include/cpp_talker.hpp
#include gedit src/cpp_node.cpp
#include "my_cpp_py_pkg/cpp_talker.hpp"using namespace std::chrono_literals;/* This example creates a subclass of Node and uses std::bind() to register a* member function as a callback from the timer. */class MinimalPublisher : public rclcpp::Node
{
public:MinimalPublisher(): Node("minimal_publisher"), count_(0){publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);timer_ = this->create_wall_timer(500ms, std::bind(&MinimalPublisher::timer_callback, this));}private:void timer_callback(){auto message = std_msgs::msg::String();message.data = "Hello, world! " + std::to_string(count_++);RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());publisher_->publish(message);}rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;size_t count_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<MinimalPublisher>());rclcpp::shutdown();return 0;
}
//增加python节点和模块导入
mkdir my_cpp_py_pkg
gedit my_cpp_py_pkg/__init__.py
mkdir scriptsgedit my_cpp_py_pkg/module_to_import.py
def listener_write(data) : my_open = open("/tmp/my_write.txt", 'w')#打开/tmp路径下的my_write.txt文件,采用写入模式#若文件不存在,创建,若存在,清空并写入my_open.write(data)#在文件中写入一个字符串my_open.write('\n')my_open.close()
gedit scripts/py_listener.py
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
from my_cpp_py_pkg.module_to_import import listener_writeclass MinimalSubscriber(Node):def __init__(self):super().__init__('minimal_subscriber')self.subscription = self.create_subscription(String,'topic',self.listener_callback,10)self.subscription #def listener_callback(self, msg):self.get_logger().info('I heard: "%s"' % msg.data)listener_write(msg.data)def main(args=None):rclpy.init(args=args)minimal_subscriber = MinimalSubscriber()rclpy.spin(minimal_subscriber)minimal_subscriber.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
//增加执行权限
chmod +x scripts/py_listener.py
//配置package.xml
<package format="3"><name>my_cpp_py_pkgname><version>0.0.0version><description>TODO: Package descriptiondescription><maintainer email="your@email.com">Namemaintainer><license>TODO: License declarationlicense><buildtool_depend>ament_cmakebuildtool_depend>//增加buildtool_depend::ament_cmake_python,来支持python使用,意味着我们将能够使用 cmake 设置我们的 Python 内容。<buildtool_depend>ament_cmake_pythonbuildtool_depend><depend>rclcppdepend>//增加rclpy,来支持python使用。<depend>rclpydepend><depend>std_msgsdepend><test_depend>ament_lint_autotest_depend><test_depend>ament_lint_commontest_depend><export><build_type>ament_cmakebuild_type>export>
package>
//配置CMakelist.txt
cmake_minimum_required(VERSION 3.5)
project(my_cpp_py_pkg)# Default to C++14
if(NOT CMAKE_CXX_STANDARD)set(CMAKE_CXX_STANDARD 14)
endif()if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# Find dependencies
find_package(ament_cmake REQUIRED)
find_package(ament_cmake_python REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rclpy REQUIRED)
find_package(std_msgs REQUIRED)# Include Cpp "include" directory
include_directories(include)# Create Cpp executable
add_executable(cpp_talker src/cpp_talker.cpp)
ament_target_dependencies(cpp_executable rclcpp)# Install Cpp executables
install(TARGETScpp_talkerDESTINATION lib/${PROJECT_NAME}
)# Install Python modules
ament_python_install_package(${PROJECT_NAME})# Install Python executables
install(PROGRAMSscripts/py_listener.pyDESTINATION lib/${PROJECT_NAME}
)ament_package()
//编译
cd my_work_place
colcon build --symlink-install --packages-select my_cpp_py_pkg//运行
ros2 run my_cpp_py_pkg cpp_talker
ros2 run my_cpp_py_pkg py_listener.py
重要提示:如果您希望使用 --symlink-install 选项进行编译(这样您就可以修改和重新运行脚本而无需重新编译),您必须使用 chmod +x 使您的脚本可执行,否则会出现"No executable found"错误。
十三、增加命名空间
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_namespace
cd cpp_namespace/include/cpp_namespace
gedit minimal_publisher_namespace.hpp
#ifndef PUBLISHER_NAMESPACE_H_
#define PUBLISHER_NAMESPACE_H_#include cd my_work_space/src/cpp_namespace/src
gedit minimal_publisher_namespace.cpp
#include "cpp_namespace/minimal_publisher_namespace.hpp"namespace minimal
{MinimalPublisher::MinimalPublisher ()
: Node("minimal_publisher"), count_(0)
{ publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);timer_ = this->create_wall_timer(500ms, std::bind(&MinimalPublisher::timer_callback, this));
}void MinimalPublisher::timer_callback()
{auto message = std_msgs::msg::String();message.data = "Hello, world! NameSpace" + std::to_string(count_++);RCLCPP_INFO(this->get_logger(), "NameSpace Publishing : '%s'", message.data.c_str());publisher_->publish(message);
}} //namespace minimal
cd my_work_space/src/cpp_namespace/src
gedit minimal_publisher_namespace_node.cpp
#include "cpp_namespace/minimal_publisher_namespace.hpp"int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<minimal::MinimalPublisher>());rclcpp::shutdown();return 0;
}
//编辑package.xml
//在<buildtool_depend>ament_cmakebuildtool_depend>后增加
<depend>rclcppdepend>
<depend>std_msgsdepend>
//编辑 CMakelist.txt
//在find_package(ament_cmake REQUIRED)后增加
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)//再增加可执行文件,ros2 run能够调用的名称
include_directories(include)
add_executable(talker_namespace src/minimal_publisher_namespace_node.cpp src/minimal_publisher_namespace.cpp)
ament_target_dependencies(talker_namespace rclcpp std_msgs)//增加可执行文件位置,ros2 run可以找到这个可执行文件
install(TARGETStalker_namespaceDESTINATION lib/${PROJECT_NAME})
//安装相关依赖
cd my_work_place
rosdep install -i --from-path src --rosdistro galactic -y//编译包
colcon build --symlink-install --packages-select cpp_namespace//加载工作空间
. install/setup.bash//执行
ros2 run cpp_namespace talker_namespace
十四、多线程
cd my_word_place/src
ros2 pkg create --build-type ament_cmake cpp_threads
cd cpp_threads/src
gedit multithreaded_executor.cpp
#include > Publishing '%s'" ,curr_thread.c_str(), message.data.c_str());this->publisher_->publish(message);};timer_ = this->create_wall_timer(500ms, timer_callback);}private:rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;size_t count_;
};class DualThreadedNode : public rclcpp::Node
{
public:DualThreadedNode(): Node("DualThreadedNode"){/* These define the callback groups* They don't really do much on their own, but they have to exist in order to* assign callbacks to them. They're also what the executor looks for when trying to run multiple threads*/callback_group_subscriber1_ = this->create_callback_group(rclcpp::CallbackGroupType::MutuallyExclusive);callback_group_subscriber2_ = this->create_callback_group(rclcpp::CallbackGroupType::MutuallyExclusive);// Each of these callback groups is basically a thread// Everything assigned to one of them gets bundled into the same threadauto sub1_opt = rclcpp::SubscriptionOptions();sub1_opt.callback_group = callback_group_subscriber1_;auto sub2_opt = rclcpp::SubscriptionOptions();sub2_opt.callback_group = callback_group_subscriber2_;subscription1_ = this->create_subscription<std_msgs::msg::String>("topic",rclcpp::QoS(10),// std::bind is sort of C++'s way of passing a function// If you're used to function-passing, skip these commentsstd::bind(&DualThreadedNode::subscriber1_cb, // First parameter is a reference to the functionthis, // What the function should be bound tostd::placeholders::_1), // At this point we're not positive of all the// parameters being passed// So we just put a generic placeholder// into the binder// (since we know we need ONE parameter)sub1_opt); // This is where we set the callback group.// This subscription will run with callback group subscriber1subscription2_ = this->create_subscription<std_msgs::msg::String>("topic",rclcpp::QoS(10),std::bind(&DualThreadedNode::subscriber2_cb,this,std::placeholders::_1),sub2_opt);}private:/*** Simple function for generating a timestamp* Used for somewhat ineffectually demonstrating that the multithreading doesn't cripple performace*/std::string timing_string(){rclcpp::Time time = this->now();return std::to_string(time.nanoseconds());}/*** Every time the Publisher publishes something, all subscribers to the topic get poked* This function gets called when Subscriber1 is poked (due to the std::bind we used when defining it)*/void subscriber1_cb(const std_msgs::msg::String::ConstSharedPtr msg){auto message_received_at = timing_string();// Extract current threadRCLCPP_INFO(this->get_logger(), "THREAD %s => Heard '%s' at %s",string_thread_id().c_str(), msg->data.c_str(), message_received_at.c_str());}/*** This function gets called when Subscriber2 is poked* Since it's running on a separate thread than Subscriber 1, it will run at (more-or-less) the same time!*/void subscriber2_cb(const std_msgs::msg::String::ConstSharedPtr msg){auto message_received_at = timing_string();// Prep display messageRCLCPP_INFO(this->get_logger(), "THREAD %s => Heard '%s' at %s",string_thread_id().c_str(), msg->data.c_str(), message_received_at.c_str());}rclcpp::CallbackGroup::SharedPtr callback_group_subscriber1_;rclcpp::CallbackGroup::SharedPtr callback_group_subscriber2_;rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription1_;rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription2_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);// You MUST use the MultiThreadedExecutor to use, well, multiple threadsrclcpp::executors::MultiThreadedExecutor executor;auto pubnode = std::make_shared<PublisherNode>();auto subnode = std::make_shared<DualThreadedNode>(); // This contains BOTH subscriber callbacks.// They will still run on different threads// One Node. Two callbacks. Two Threadsexecutor.add_node(pubnode);executor.add_node(subnode);executor.spin();rclcpp::shutdown();return 0;
}
//编译package.xml
//在<buildtool_depend>ament_cmakebuildtool_depend>后增加
<depend>rclcppdepend>
<depend>std_msgsdepend>
//编译CMakelist.txt
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)add_executable(multithreaded_executor src/multithreaded_executor.cpp)
ament_target_dependencies(multithreaded_executor rclcpp std_msgs)install(TARGETSmultithreaded_executorDESTINATION lib/${PROJECT_NAME}
)
//安装相关依赖
cd my_work_place
rosdep install -i --from-path src --rosdistro galactic -y//编译包
colcon build --symlink-install --packages-select cpp_threads
//加载工作空间
. install/setup.bash
//执行
ros2 run cpp_threads multithreaded_executor
十四、单线程
cd my_work_place/src
ros2 pkg craete --build-type ament_cmake cpp_threads
cd cpp_threads/src
gedit singlenthreaded_executor.cpp
#include > Publishing '%s'" ,curr_thread.c_str(), message.data.c_str());this->publisher_->publish(message);};timer_ = this->create_wall_timer(500ms, timer_callback);}private:rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;size_t count_;
};class SingleThreadedNode : public rclcpp::Node
{
public:SingleThreadedNode(): Node("SingleThreadedNode"){// Select MutuallyExclusive or Reentrant Callback Group Typemy_callback_group = create_callback_group(rclcpp::CallbackGroupType::MutuallyExclusive);// my_callback_group = create_callback_group(rclcpp::CallbackGroupType::Reentrant);// Run timer at 10fpstimer_ = this->create_wall_timer(100ms, std::bind(&SingleThreadedNode::timer_callback, this), my_callback_group);// Run subscription with depth 10subscription_ = this->create_subscription<std_msgs::msg::String>("topic", 10, std::bind(&SingleThreadedNode::topic_callback, this, _1));}private:void timer_callback(){std::cout << "timer callback" << std::endl;// Sleep here, to produce a long callbackstd::this_thread::sleep_for(5ms);}void topic_callback(const std_msgs::msg::String &) const{std::cout << "subscription callback" << std::endl;}rclcpp::TimerBase::SharedPtr timer_;rclcpp::CallbackGroup::SharedPtr my_callback_group;rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);auto node1 = std::make_shared<PublisherNode>();auto node2 = std::make_shared<SingleThreadedNode>();// Select SingleThreadedExecutor or MultiThreadedExecutorrclcpp::executors::SingleThreadedExecutor executor;// rclcpp::executors::MultiThreadedExecutor executor;executor.add_node(node1);executor.add_node(node2);executor.spin();rclcpp::shutdown();return 0;
}
//编译package.xml
//在<buildtool_depend>ament_cmakebuildtool_depend>后增加
<depend>rclcppdepend>
<depend>std_msgsdepend>
//编译CMakelist.txt
//在find_package(ament_cmake REQUIRED)后增加
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)add_executable(singlethreaded_executor src/singlethreaded_executor.cpp)
ament_target_dependencies(singlethreaded_executor rclcpp std_msgs)install(TARGETSsinglethreaded_executor DESTINATION lib/${PROJECT_NAME}
)
//安装相关依赖
cd my_work_place
rosdep install -i --from-path src --rosdistro galactic -y//编译包
colcon build --symlink-install --packages-select cpp_threads//加载工作空间
. install/setup.bash//执行
ros2 run cpp_threads singlethreaded_executor
十五、话题组件
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_component_topic
cd cpp_component_topic/include/cpp_component_topic
gedit talker_component.hpp
#ifndef COMPOSITION__TALKER_COMPONENT_HPP_
#define COMPOSITION__TALKER_COMPONENT_HPP_#include "cpp_component_topic/visibility_control.h"
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"namespace composition
{class Talker : public rclcpp::Node
{
public:COMPOSITION_PUBLICexplicit Talker(const rclcpp::NodeOptions & options);protected:void on_timer();private:size_t count_;rclcpp::Publisher<std_msgs::msg::String>::SharedPtr pub_;rclcpp::TimerBase::SharedPtr timer_;
};} // namespace composition#endif // COMPOSITION__TALKER_COMPONENT_HPP_
gedit listener_component.hpp
#ifndef COMPOSITION__LISTENER_COMPONENT_HPP_
#define COMPOSITION__LISTENER_COMPONENT_HPP_#include "cpp_component_topic/visibility_control.h"
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"namespace composition
{class Listener : public rclcpp::Node
{
public:COMPOSITION_PUBLICexplicit Listener(const rclcpp::NodeOptions & options);private:rclcpp::Subscription<std_msgs::msg::String>::SharedPtr sub_;
};} // namespace composition#endif // COMPOSITION__LISTENER_COMPONENT_HPP_
gedit visibility_control.h
#ifndef COMPOSITION__VISIBILITY_CONTROL_H_
#define COMPOSITION__VISIBILITY_CONTROL_H_#ifdef __cplusplus
extern "C"
{
#endif// This logic was borrowed (then namespaced) from the examples on the gcc wiki:
// https://gcc.gnu.org/wiki/Visibility#if defined _WIN32 || defined __CYGWIN__#ifdef __GNUC__#define COMPOSITION_EXPORT __attribute__ ((dllexport))#define COMPOSITION_IMPORT __attribute__ ((dllimport))#else#define COMPOSITION_EXPORT __declspec(dllexport)#define COMPOSITION_IMPORT __declspec(dllimport)#endif#ifdef COMPOSITION_BUILDING_DLL#define COMPOSITION_PUBLIC COMPOSITION_EXPORT#else#define COMPOSITION_PUBLIC COMPOSITION_IMPORT#endif#define COMPOSITION_PUBLIC_TYPE COMPOSITION_PUBLIC#define COMPOSITION_LOCAL
#else#define COMPOSITION_EXPORT __attribute__ ((visibility("default")))#define COMPOSITION_IMPORT#if __GNUC__ >= 4#define COMPOSITION_PUBLIC __attribute__ ((visibility("default")))#define COMPOSITION_LOCAL __attribute__ ((visibility("hidden")))#else#define COMPOSITION_PUBLIC#define COMPOSITION_LOCAL#endif#define COMPOSITION_PUBLIC_TYPE
#endif#ifdef __cplusplus
}
#endif#endif // COMPOSITION__VISIBILITY_CONTROL_H_
cd my_work_place/src/cpp_component_topic/src
gedit talker_component.cpp
#include "cpp_component_topic/talker_component.hpp"#include touch listener_component.cpp
#include "cpp_component_topic/listener_component.hpp"#include //编译package.xml
//在<buildtool_depend>ament_cmakebuildtool_depend>后增加<depend>rclcppdepend><depend>rclcpp_componentsdepend><depend>std_msgsdepend>
//编译CMakelist.txt
//在find_package(ament_cmake REQUIRED)后增加
find_package(rclcpp REQUIRED)
find_package(rclcpp_components REQUIRED)
find_package(std_msgs REQUIRED)//编译为共享库并注册talker_component和listener_component 组件
include_directories(include)
# create ament index resource which references the libraries in the binary dir
set(node_plugins "")add_library(talker_component SHAREDsrc/talker_component.cpp)
target_compile_definitions(talker_componentPRIVATE "COMPOSITION_BUILDING_DLL")
ament_target_dependencies(talker_component"rclcpp""rclcpp_components""std_msgs")
rclcpp_components_register_nodes(talker_component "composition::Talker")
set(node_plugins "${node_plugins}composition::Talker;$\n" )add_library(listener_component SHAREDsrc/listener_component.cpp)
target_compile_definitions(listener_componentPRIVATE "COMPOSITION_BUILDING_DLL")
ament_target_dependencies(listener_component"rclcpp""rclcpp_components""std_msgs")
rclcpp_components_register_nodes(listener_component "composition::Listener")
set(node_plugins "${node_plugins}composition::Listener;$\n" )//生成和安装相关库文件和执行文件
install(TARGETStalker_componentlistener_componentARCHIVE DESTINATION libLIBRARY DESTINATION libRUNTIME DESTINATION bin)
//安装相关依赖
rosdep install -i --from-path src --rosdistro galactic -y//编译包
colcon build --symlink-install --packages-select cpp_component_topic//加载工作空间
. install/setup.bash//查看工作区中已注册和可用的组件ros2 component types//启动组件容器
ros2 run rclcpp_components component_container//查看组件容器名称
ros2 component list//加载话题发布组件到容器/ComponentManager
ros2 component load /ComponentManager cpp_component_topic composition::Talker//加载话题订阅组件到容器/ComponentManager
ros2 component load /ComponentManager cpp_component_topic composition::Listener//在运行启动容器组件的终端下运行
ros2 run rclcpp_components component_container
话题组件增加launch启动
cd my_work_place/src/cpp_component_topic
mkdir launch
touch launch/composition_demo.launch.py
"""Launch a talker and a listener in a component container."""import launch
from launch_ros.actions import ComposableNodeContainer
from launch_ros.descriptions import ComposableNodedef generate_launch_description():"""Generate launch description with multiple components."""container = ComposableNodeContainer(name='my_container',namespace='',package='rclcpp_components',executable='component_container',composable_node_descriptions=[ComposableNode(package='cpp_component_topic',plugin='composition::Talker',name='talker'),ComposableNode(package='cpp_component_topic',plugin='composition::Listener',name='listener')],output='screen',)return launch.LaunchDescription([container])
//编辑CMakeLists.txt
# Install launch files.
install(DIRECTORYlaunchDESTINATION share/${PROJECT_NAME}
)
//编译
colcon build --symlink-install --packages-select cpp_component_topic//加载工作空间
. install/setup.bash//启动launch
ros2 launch cpp_component_topic composition_demo.launch.py
十六、服务组件
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_component_service
cd cpp_component_service/include/cpp_component_service
gedit server_component.hpp
#ifndef COMPOSITION__SERVER_COMPONENT_HPP_
#define COMPOSITION__SERVER_COMPONENT_HPP_#include "cpp_component_service/visibility_control.h"
#include "example_interfaces/srv/add_two_ints.hpp"
#include "rclcpp/rclcpp.hpp"namespace composition
{class Server : public rclcpp::Node
{
public:COMPOSITION_PUBLICexplicit Server(const rclcpp::NodeOptions & options);private:rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr srv_;
};} // namespace composition#endif // COMPOSITION__SERVER_COMPONENT_HPP_
touch client_component.hpp
#ifndef COMPOSITION__CLIENT_COMPONENT_HPP_
#define COMPOSITION__CLIENT_COMPONENT_HPP_#include "cpp_component_service/visibility_control.h"
#include "example_interfaces/srv/add_two_ints.hpp"
#include "rclcpp/rclcpp.hpp"namespace composition
{class Client : public rclcpp::Node
{
public:COMPOSITION_PUBLICexplicit Client(const rclcpp::NodeOptions & options);protected:void on_timer();private:rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client_;rclcpp::TimerBase::SharedPtr timer_;
};} // namespace composition#endif // COMPOSITION__CLIENT_COMPONENT_HPP_
gedit visibility_control.h
#ifndef COMPOSITION__VISIBILITY_CONTROL_H_
#define COMPOSITION__VISIBILITY_CONTROL_H_#ifdef __cplusplus
extern "C"
{
#endif// This logic was borrowed (then namespaced) from the examples on the gcc wiki:
// https://gcc.gnu.org/wiki/Visibility#if defined _WIN32 || defined __CYGWIN__#ifdef __GNUC__#define COMPOSITION_EXPORT __attribute__ ((dllexport))#define COMPOSITION_IMPORT __attribute__ ((dllimport))#else#define COMPOSITION_EXPORT __declspec(dllexport)#define COMPOSITION_IMPORT __declspec(dllimport)#endif#ifdef COMPOSITION_BUILDING_DLL#define COMPOSITION_PUBLIC COMPOSITION_EXPORT#else#define COMPOSITION_PUBLIC COMPOSITION_IMPORT#endif#define COMPOSITION_PUBLIC_TYPE COMPOSITION_PUBLIC#define COMPOSITION_LOCAL
#else#define COMPOSITION_EXPORT __attribute__ ((visibility("default")))#define COMPOSITION_IMPORT#if __GNUC__ >= 4#define COMPOSITION_PUBLIC __attribute__ ((visibility("default")))#define COMPOSITION_LOCAL __attribute__ ((visibility("hidden")))#else#define COMPOSITION_PUBLIC#define COMPOSITION_LOCAL#endif#define COMPOSITION_PUBLIC_TYPE
#endif#ifdef __cplusplus
}
#endif#endif // COMPOSITION__VISIBILITY_CONTROL_H_
cd my_work_place/src/cpp_component_service/src
gedit server_component.cpp
#include "cpp_component_service/server_component.hpp"#include touch client_component.cpp
#include "cpp_component_service/client_component.hpp"#include //编译package.xml
<depend>rclcppdepend>
<depend>rclcpp_componentsdepend>
<depend>example_interfacesdepend>
//编译CMakelist.txt
find_package(rclcpp REQUIRED)
find_package(rclcpp_components REQUIRED)
find_package(example_interfaces REQUIRED)//编译为共享库并注册server_component和client_component组件
nclude_directories(include)
# create ament index resource which references the libraries in the binary dir
set(node_plugins "")add_library(server_component SHAREDsrc/server_component.cpp)
target_compile_definitions(server_componentPRIVATE "COMPOSITION_BUILDING_DLL")
ament_target_dependencies(server_component"example_interfaces""rclcpp""rclcpp_components")
rclcpp_components_register_nodes(server_component "composition::Server")
set(node_plugins "${node_plugins}composition::Server;$\n" )add_library(client_component SHAREDsrc/client_component.cpp)
target_compile_definitions(client_componentPRIVATE "COMPOSITION_BUILDING_DLL")
ament_target_dependencies(client_component"example_interfaces""rclcpp""rclcpp_components")
rclcpp_components_register_nodes(client_component "composition::Client")
set(node_plugins "${node_plugins}composition::Client;$\n" )//生成和安装相关库文件和执行文件
install(TARGETSserver_component client_component ARCHIVE DESTINATION libLIBRARY DESTINATION libRUNTIME DESTINATION bin)
//安装相关依赖
cd my_work_place
rosdep install -i --from-path src --rosdistro galactic -y//编译包
colcon build --symlink-install --packages-select cpp_component_service//加载工作空间
. install/setup.bash//查看工作区中已注册和可用的组件ros2 component types//启动组件容器
ros2 run rclcpp_components component_container//查看组件容器名称ros2 component list//加载话题发布组件到容器/ComponentManager
ros2 component load /ComponentManager cpp_component_service composition::Server//加载话题订阅组件到容器/ComponentManager
ros2 component load /ComponentManager cpp_component_service composition::Client
服务组件增加launch启动
cd my_work_place/src/cpp_component_service
mkdir launch
touch launch/composition_demo.launch.py
"""Launch a server and a client in a component container."""import launch
from launch_ros.actions import ComposableNodeContainer
from launch_ros.descriptions import ComposableNodedef generate_launch_description():"""Generate launch description with multiple components."""container = ComposableNodeContainer(name='my_container',namespace='',package='rclcpp_components',executable='component_container',composable_node_descriptions=[ComposableNode(package='cpp_component_service',plugin='composition::Server',name='talker'),ComposableNode(package='cpp_component_service',plugin='composition::Client',name='listener')],output='screen',)return launch.LaunchDescription([container])
//编辑CMakeLists.txt
# Install launch files.
install(DIRECTORYlaunchDESTINATION share/${PROJECT_NAME}
)
//编译
colcon build --symlink-install --packages-select cpp_component_service//加载工作空间
. install/setup.bash//启动launch
ros2 launch cpp_component_service composition_demo.launch.py
十七、进程内(intra_process)话题发布和订阅
- 在同一进程内的不同节点,可以通过共享指针方式实现内容读取,减少消息的拷贝开销;
- 对于图像之类数据量比较大的节点间处理的效率和性能将大大提高;
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_intra_process_topic
cd cpp_intra_process_topic/src
touch two_node_pipeline.cpp
#include //编译package.xml
<build_depend>rclcppbuild_depend>
<build_depend>std_msgsbuild_depend>
//编译CMakelist.txt
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)include_directories(include)add_executable(two_node_pipeline src/two_node_pipeline.cpp)
target_link_libraries(two_node_pipelinerclcpp::rclcpp${std_msgs_TARGETS})install(TARGETStwo_node_pipelineDESTINATION lib/${PROJECT_NAME})
//编译包
cd my_work_place
colcon build --symlink-install --packages-select cpp_intra_process_topic//加载工作空间
. install/setup.bash//测试
ros2 run cpp_intra_process_topic two_node_pipeline
十七、进程内(intra_process)话题发布和订阅2
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_intra_process_topic2
cd cpp_intra_process_topic2/src
touch cylic_pipeline.cpp
#include //编译package.xml
<build_depend>rclcppbuild_depend>
<build_depend>std_msgsbuild_depend>
//编译CMakelist.txt
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)include_directories(include)add_executable(cyclic_pipelinesrc/cyclic_pipeline.cpp)
target_link_libraries(cyclic_pipelinerclcpp::rclcpp${std_msgs_TARGETS})install(TARGETScyclic_pipelineDESTINATION lib/${PROJECT_NAME})
//编译包
colcon build --symlink-install --packages-select cpp_intra_process_topic2//加载工作空间
. install/setup.bash//测试
ros2 run cpp_intra_process_topic2 cyclic_pipeline
十八、进程内(intra_process)图像处理
实现图像处理,启动相机,订阅图像消息并处理。
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_intra_process_image
cd cpp_intra_process_image/include/cpp_intra_process_image
touch common.hpp
#ifndef IMAGE_PIPELINE__COMMON_HPP_
#define IMAGE_PIPELINE__COMMON_HPP_#ifdef _WIN32
#include touch camera_node.hpp
#ifndef IMAGE_PIPELINE__CAMERA_NODE_HPP_
#define IMAGE_PIPELINE__CAMERA_NODE_HPP_#include touch image_view_node.hpp
#ifndef IMAGE_PIPELINE__IMAGE_VIEW_NODE_HPP_
#define IMAGE_PIPELINE__IMAGE_VIEW_NODE_HPP_#include then pause until another . key = '\0';while (key != ' ') {key = cv::waitKey(1);if (key == 27 /* ESC */ || key == 'q') {rclcpp::shutdown();}if (!rclcpp::ok()) {break;}}}});}private:rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr sub_;cv::VideoCapture cap_;cv::Mat frame_;
};#endif // IMAGE_PIPELINE__IMAGE_VIEW_NODE_HPP_
touch watermark_node.hpp
#ifndef IMAGE_PIPELINE__WATERMARK_NODE_HPP_
#define IMAGE_PIPELINE__WATERMARK_NODE_HPP_#include cd my_work_place/src/cpp_intra_process_image/src
touch camera_node.cpp
#include touch image_view_node.cpp
#include touch watermark_node.cpp
#include touch two_image_view.cpp
#include touch all_in_one.cpp
#include //编译package.xml
<depend>libopencv-devdepend>
<depend>rclcppdepend>
<depend>sensor_msgsdepend>
<depend>std_msgsdepend>
//编译CMakelist.txt
find_package(builtin_interfaces REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rmw REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(std_msgs REQUIRED)
find_package(OpenCV REQUIRED COMPONENTS core highgui imgproc videoio)//生成执行文件
include_directories(include)# A single program with one of each of the image pipeline demo nodes.
add_executable(all_in_onesrc/all_in_one.cpp)
target_link_libraries(all_in_onerclcpp::rclcpp${builtin_interfaces_TARGETS}${sensor_msgs_TARGETS}opencv_coreopencv_highgui)# A single program with one of each of the image pipeline demo nodes, but two image views.
add_executable(two_image_viewsrc/two_image_view.cpp)
target_link_libraries(two_image_viewrclcpp::rclcpp${builtin_interfaces_TARGETS}${sensor_msgs_TARGETS}opencv_coreopencv_highgui)# A stand alone node which produces images from a camera using OpenCV.
add_executable(camera_nodesrc/camera_node.cpp)
target_link_libraries(camera_noderclcpp::rclcpp${builtin_interfaces_TARGETS}${sensor_msgs_TARGETS}opencv_coreopencv_highguiopencv_imgproc)# A stand alone node which adds some text to an image using OpenCV before passing it along.
add_executable(watermark_nodesrc/watermark_node.cpp)
target_link_libraries(watermark_noderclcpp::rclcpp${builtin_interfaces_TARGETS}${sensor_msgs_TARGETS}opencv_coreopencv_videoio)# A stand alone node which consumes images and displays them using OpenCV.
add_executable(image_view_nodesrc/image_view_node.cpp)
target_link_libraries(image_view_noderclcpp::rclcpp${builtin_interfaces_TARGETS}${sensor_msgs_TARGETS}opencv_coreopencv_highgui)//安装相关库文件和执行文件
install(TARGETSall_in_onetwo_image_viewcamera_nodewatermark_nodeimage_view_nodeDESTINATION lib/${PROJECT_NAME})
//编译包
colcon build --symlink-install --packages-select cpp_intra_process_image
//加载工作空间
. install/setup.bash
//测试1
ros2 run cpp_intra_process_image all_in_one
//测试2
ros2 run cpp_intra_process_image two_image_view
十九、生命周期节点
//安装依赖
sudo apt install ros-galactic-lifecycle-msgs
//新建一个包cpp_lifecycle
cd my_work_place/src
ros2 pkg create --build-type ament_cmake cpp_lifecycle
cd cpp_lifecycle/src
touch lifecycle_listener.cpp
#include touch lifecycle_talker.cpp
#include __get_state* - __change_state* - __get_available_states* - __get_available_transitions* Additionally, a publisher for state change notifications is* created:* - __transition_event*/
class LifecycleTalker : public rclcpp_lifecycle::LifecycleNode
{
public:/// LifecycleTalker constructor/*** The lifecycletalker/lifecyclenode constructor has the same* arguments a regular node.*/explicit LifecycleTalker(const std::string & node_name, bool intra_process_comms = false): rclcpp_lifecycle::LifecycleNode(node_name,rclcpp::NodeOptions().use_intra_process_comms(intra_process_comms)){}/// Callback for walltimer in order to publish the message./*** Callback for walltimer. This function gets invoked by the timer* and executes the publishing.* For this demo, we ask the node for its current state. If the* lifecycle publisher is not activate, we still invoke publish, but* the communication is blocked so that no messages is actually transferred.*/voidpublish(){static size_t count = 0;auto msg = std::make_unique<std_msgs::msg::String>();msg->data = "Lifecycle HelloWorld #" + std::to_string(++count);// Print the current state for demo purposesif (!pub_->is_activated()) {RCLCPP_INFO(get_logger(), "Lifecycle publisher is currently inactive. Messages are not published.");} else {RCLCPP_INFO(get_logger(), "Lifecycle publisher is active. Publishing: [%s]", msg->data.c_str());}// We independently from the current state call publish on the lifecycle// publisher.// Only if the publisher is in an active state, the message transfer is// enabled and the message actually published.pub_->publish(std::move(msg));}/// Transition callback for state configuring/*** on_configure callback is being called when the lifecycle node* enters the "configuring" state.* Depending on the return value of this function, the state machine* either invokes a transition to the "inactive" state or stays* in "unconfigured".* TRANSITION_CALLBACK_SUCCESS transitions to "inactive"* TRANSITION_CALLBACK_FAILURE transitions to "unconfigured"* TRANSITION_CALLBACK_ERROR or any uncaught exceptions to "errorprocessing"*/rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturnon_configure(const rclcpp_lifecycle::State &){// This callback is supposed to be used for initialization and// configuring purposes.// We thus initialize and configure our publishers and timers.// The lifecycle node API does return lifecycle components such as// lifecycle publishers. These entities obey the lifecycle and// can comply to the current state of the node.// As of the beta version, there is only a lifecycle publisher// available.pub_ = this->create_publisher<std_msgs::msg::String>("lifecycle_chatter", 10);timer_ = this->create_wall_timer(1s, std::bind(&LifecycleTalker::publish, this));RCLCPP_INFO(get_logger(), "on_configure() is called.");// We return a success and hence invoke the transition to the next// step: "inactive".// If we returned TRANSITION_CALLBACK_FAILURE instead, the state machine// would stay in the "unconfigured" state.// In case of TRANSITION_CALLBACK_ERROR or any thrown exception within// this callback, the state machine transitions to state "errorprocessing".return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;}/// Transition callback for state activating/*** on_activate callback is being called when the lifecycle node* enters the "activating" state.* Depending on the return value of this function, the state machine* either invokes a transition to the "active" state or stays* in "inactive".* TRANSITION_CALLBACK_SUCCESS transitions to "active"* TRANSITION_CALLBACK_FAILURE transitions to "inactive"* TRANSITION_CALLBACK_ERROR or any uncaught exceptions to "errorprocessing"*/rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturnon_activate(const rclcpp_lifecycle::State & state){// The parent class method automatically transition on managed entities// (currently, LifecyclePublisher).// pub_->on_activate() could also be called manually here.// Overriding this method is optional, a lot of times the default is enough.LifecycleNode::on_activate(state);pub_->on_activate();RCUTILS_LOG_INFO_NAMED(get_name(), "on_activate() is called.");// Let's sleep for 2 seconds.// We emulate we are doing important// work in the activating phase.std::this_thread::sleep_for(2s);// We return a success and hence invoke the transition to the next// step: "active".// If we returned TRANSITION_CALLBACK_FAILURE instead, the state machine// would stay in the "inactive" state.// In case of TRANSITION_CALLBACK_ERROR or any thrown exception within// this callback, the state machine transitions to state "errorprocessing".return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;}/// Transition callback for state deactivating/*** on_deactivate callback is being called when the lifecycle node* enters the "deactivating" state.* Depending on the return value of this function, the state machine* either invokes a transition to the "inactive" state or stays* in "active".* TRANSITION_CALLBACK_SUCCESS transitions to "inactive"* TRANSITION_CALLBACK_FAILURE transitions to "active"* TRANSITION_CALLBACK_ERROR or any uncaught exceptions to "errorprocessing"*/rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturnon_deactivate(const rclcpp_lifecycle::State & state){// The parent class method automatically transition on managed entities// (currently, LifecyclePublisher).// pub_->on_deactivate() could also be called manually here.// Overriding this method is optional, a lot of times the default is enough.LifecycleNode::on_deactivate(state);RCUTILS_LOG_INFO_NAMED(get_name(), "on_deactivate() is called.");// We return a success and hence invoke the transition to the next// step: "inactive".// If we returned TRANSITION_CALLBACK_FAILURE instead, the state machine// would stay in the "active" state.// In case of TRANSITION_CALLBACK_ERROR or any thrown exception within// this callback, the state machine transitions to state "errorprocessing".return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;}/// Transition callback for state cleaningup/*** on_cleanup callback is being called when the lifecycle node* enters the "cleaningup" state.* Depending on the return value of this function, the state machine* either invokes a transition to the "unconfigured" state or stays* in "inactive".* TRANSITION_CALLBACK_SUCCESS transitions to "unconfigured"* TRANSITION_CALLBACK_FAILURE transitions to "inactive"* TRANSITION_CALLBACK_ERROR or any uncaught exceptions to "errorprocessing"*/rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturnon_cleanup(const rclcpp_lifecycle::State &){// In our cleanup phase, we release the shared pointers to the// timer and publisher. These entities are no longer available// and our node is "clean".timer_.reset();pub_.reset();RCUTILS_LOG_INFO_NAMED(get_name(), "on cleanup is called.");// We return a success and hence invoke the transition to the next// step: "unconfigured".// If we returned TRANSITION_CALLBACK_FAILURE instead, the state machine// would stay in the "inactive" state.// In case of TRANSITION_CALLBACK_ERROR or any thrown exception within// this callback, the state machine transitions to state "errorprocessing".return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;}/// Transition callback for state shutting down/*** on_shutdown callback is being called when the lifecycle node* enters the "shuttingdown" state.* Depending on the return value of this function, the state machine* either invokes a transition to the "finalized" state or stays* in its current state.* TRANSITION_CALLBACK_SUCCESS transitions to "finalized"* TRANSITION_CALLBACK_FAILURE transitions to current state* TRANSITION_CALLBACK_ERROR or any uncaught exceptions to "errorprocessing"*/rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturnon_shutdown(const rclcpp_lifecycle::State & state){// In our shutdown phase, we release the shared pointers to the// timer and publisher. These entities are no longer available// and our node is "clean".timer_.reset();pub_.reset();RCUTILS_LOG_INFO_NAMED(get_name(),"on shutdown is called from state %s.",state.label().c_str());// We return a success and hence invoke the transition to the next// step: "finalized".// If we returned TRANSITION_CALLBACK_FAILURE instead, the state machine// would stay in the current state.// In case of TRANSITION_CALLBACK_ERROR or any thrown exception within// this callback, the state machine transitions to state "errorprocessing".return rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn::SUCCESS;}private:// We hold an instance of a lifecycle publisher. This lifecycle publisher// can be activated or deactivated regarding on which state the lifecycle node// is in.// By default, a lifecycle publisher is inactive by creation and has to be// activated to publish messages into the ROS world.std::shared_ptr<rclcpp_lifecycle::LifecyclePublisher<std_msgs::msg::String>> pub_;// We hold an instance of a timer which periodically triggers the publish function.// As for the beta version, this is a regular timer. In a future version, a// lifecycle timer will be created which obeys the same lifecycle management as the// lifecycle publisher.std::shared_ptr<rclcpp::TimerBase> timer_;
};/*** A lifecycle node has the same node API* as a regular node. This means we can spawn a* node, give it a name and add it to the executor.*/
int main(int argc, char * argv[])
{// force flush of the stdout buffer.// this ensures a correct sync of all prints// even when executed simultaneously within the launch file.setvbuf(stdout, NULL, _IONBF, BUFSIZ);rclcpp::init(argc, argv);rclcpp::executors::SingleThreadedExecutor exe;std::shared_ptr<LifecycleTalker> lc_node =std::make_shared<LifecycleTalker>("lc_talker");exe.add_node(lc_node->get_node_base_interface());exe.spin();rclcpp::shutdown();return 0;
}
touch lifecycle_service_client.cpp
#include /.
// In this demo, we use get_state and change_state
// and thus the two service topics are:
// lc_talker/get_state
// lc_talker/change_state
static constexpr char const * node_get_state_topic = "lc_talker/get_state";
static constexpr char const * node_change_state_topic = "lc_talker/change_state";template<typename FutureT, typename WaitTimeT>
std::future_status
wait_for_result(FutureT & future,WaitTimeT time_to_wait)
{auto end = std::chrono::steady_clock::now() + time_to_wait;std::chrono::milliseconds wait_period(100);std::future_status status = std::future_status::timeout;do {auto now = std::chrono::steady_clock::now();auto time_left = end - now;if (time_left <= std::chrono::seconds(0)) {break;}status = future.wait_for((time_left < wait_period) ? time_left : wait_period);} while (rclcpp::ok() && status != std::future_status::ready);return status;
}class LifecycleServiceClient : public rclcpp::Node
{
public:explicit LifecycleServiceClient(const std::string & node_name): Node(node_name){}voidinit(){// Every lifecycle node spawns automatically a couple// of services which allow an external interaction with// these nodes.// The two main important ones are GetState and ChangeState.client_get_state_ = this->create_client<lifecycle_msgs::srv::GetState>(node_get_state_topic);client_change_state_ = this->create_client<lifecycle_msgs::srv::ChangeState>(node_change_state_topic);}/// Requests the current state of the node/*** In this function, we send a service request* asking for the current state of the node* lc_talker.* If it does return within the given time_out,* we return the current state of the node, if* not, we return an unknown state.* \param time_out Duration in seconds specifying* how long we wait for a response before returning* unknown state*/unsigned intget_state(std::chrono::seconds time_out = 3s){auto request = std::make_shared<lifecycle_msgs::srv::GetState::Request>();if (!client_get_state_->wait_for_service(time_out)) {RCLCPP_ERROR(get_logger(),"Service %s is not available.",client_get_state_->get_service_name());return lifecycle_msgs::msg::State::PRIMARY_STATE_UNKNOWN;}// We send the service request for asking the current// state of the lc_talker node.auto future_result = client_get_state_->async_send_request(request);// Let's wait until we have the answer from the node.// If the request times out, we return an unknown state.auto future_status = wait_for_result(future_result, time_out);if (future_status != std::future_status::ready) {RCLCPP_ERROR(get_logger(), "Server time out while getting current state for node %s", lifecycle_node);return lifecycle_msgs::msg::State::PRIMARY_STATE_UNKNOWN;}// We have an succesful answer. So let's print the current state.if (future_result.get()) {RCLCPP_INFO(get_logger(), "Node %s has current state %s.",lifecycle_node, future_result.get()->current_state.label.c_str());return future_result.get()->current_state.id;} else {RCLCPP_ERROR(get_logger(), "Failed to get current state for node %s", lifecycle_node);return lifecycle_msgs::msg::State::PRIMARY_STATE_UNKNOWN;}}/// Invokes a transition/*** We send a Service request and indicate* that we want to invoke transition with* the id "transition".* By default, these transitions are* - configure* - activate* - cleanup* - shutdown* \param transition id specifying which* transition to invoke* \param time_out Duration in seconds specifying* how long we wait for a response before returning* unknown state*/boolchange_state(std::uint8_t transition, std::chrono::seconds time_out = 3s){auto request = std::make_shared<lifecycle_msgs::srv::ChangeState::Request>();request->transition.id = transition;if (!client_change_state_->wait_for_service(time_out)) {RCLCPP_ERROR(get_logger(),"Service %s is not available.",client_change_state_->get_service_name());return false;}// We send the request with the transition we want to invoke.auto future_result = client_change_state_->async_send_request(request);// Let's wait until we have the answer from the node.// If the request times out, we return an unknown state.auto future_status = wait_for_result(future_result, time_out);if (future_status != std::future_status::ready) {RCLCPP_ERROR(get_logger(), "Server time out while getting current state for node %s", lifecycle_node);return false;}// We have an answer, let's print our success.if (future_result.get()->success) {RCLCPP_INFO(get_logger(), "Transition %d successfully triggered.", static_cast<int>(transition));return true;} else {RCLCPP_WARN(get_logger(), "Failed to trigger transition %u", static_cast<unsigned int>(transition));return false;}}private:std::shared_ptr<rclcpp::Client<lifecycle_msgs::srv::GetState>> client_get_state_;std::shared_ptr<rclcpp::Client<lifecycle_msgs::srv::ChangeState>> client_change_state_;
};/*** This is a little independent* script which triggers the* default lifecycle of a node.* It starts with configure, activate,* deactivate, activate, deactivate,* cleanup and finally shutdown*/
void
callee_script(std::shared_ptr<LifecycleServiceClient> lc_client)
{rclcpp::WallRate time_between_state_changes(0.1); // 10s// configure{if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_CONFIGURE)) {return;}if (!lc_client->get_state()) {return;}}// activate{time_between_state_changes.sleep();if (!rclcpp::ok()) {return;}if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_ACTIVATE)) {return;}if (!lc_client->get_state()) {return;}}// deactivate{time_between_state_changes.sleep();if (!rclcpp::ok()) {return;}if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_DEACTIVATE)) {return;}if (!lc_client->get_state()) {return;}}// activate it again{time_between_state_changes.sleep();if (!rclcpp::ok()) {return;}if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_ACTIVATE)) {return;}if (!lc_client->get_state()) {return;}}// and deactivate it again{time_between_state_changes.sleep();if (!rclcpp::ok()) {return;}if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_DEACTIVATE)) {return;}if (!lc_client->get_state()) {return;}}// we cleanup{time_between_state_changes.sleep();if (!rclcpp::ok()) {return;}if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_CLEANUP)) {return;}if (!lc_client->get_state()) {return;}}// and finally shutdown// Note: We have to be precise here on which shutdown transition id to call// We are currently in the unconfigured state and thus have to call// TRANSITION_UNCONFIGURED_SHUTDOWN{time_between_state_changes.sleep();if (!rclcpp::ok()) {return;}if (!lc_client->change_state(lifecycle_msgs::msg::Transition::TRANSITION_UNCONFIGURED_SHUTDOWN)){return;}if (!lc_client->get_state()) {return;}}
}void
wake_executor(std::shared_future<void> future, rclcpp::executors::SingleThreadedExecutor & exec)
{future.wait();// Wake the executor when the script is done// https://github.com/ros2/rclcpp/issues/1916exec.cancel();
}int main(int argc, char ** argv)
{// force flush of the stdout buffer.// this ensures a correct sync of all prints// even when executed simultaneously within the launch file.setvbuf(stdout, NULL, _IONBF, BUFSIZ);rclcpp::init(argc, argv);auto lc_client = std::make_shared<LifecycleServiceClient>("lc_client");lc_client->init();rclcpp::executors::SingleThreadedExecutor exe;exe.add_node(lc_client);std::shared_future<void> script = std::async(std::launch::async,std::bind(callee_script, lc_client));auto wake_exec = std::async(std::launch::async,std::bind(wake_executor, script, std::ref(exe)));exe.spin_until_future_complete(script);rclcpp::shutdown();return 0;
}
//编译package.xml
<depend>lifecycle_msgsdepend>
<depend>rclcpp_lifecycledepend>
<depend>std_msgsdepend>
//编译CMakelist.txt
//在project(cpp_lifecycle)后增加
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)set(CMAKE_CXX_STANDARD 14)
endif()//在find_package(ament_cmake REQUIRED)后增加
find_package(rclcpp_lifecycle REQUIRED)
find_package(lifecycle_msgs REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)//生成执行文件
### demos
add_executable(lifecycle_talkersrc/lifecycle_talker.cpp)
ament_target_dependencies(lifecycle_talker"lifecycle_msgs""rclcpp_lifecycle""std_msgs"
)
add_executable(lifecycle_listenersrc/lifecycle_listener.cpp)
ament_target_dependencies(lifecycle_listener"lifecycle_msgs""rclcpp_lifecycle""std_msgs"
)
add_executable(lifecycle_service_clientsrc/lifecycle_service_client.cpp)
ament_target_dependencies(lifecycle_service_client"lifecycle_msgs""rclcpp_lifecycle""std_msgs"
)//安装相关库文件和执行文件
install(TARGETSlifecycle_talkerlifecycle_listenerlifecycle_service_clientDESTINATION lib/${PROJECT_NAME})
//编译包
colcon build --symlink-install --packages-select cpp_lifecycle//加载工作空间
. install/setup.bash//启动
ros2 run cpp_lifecycle lifecycle_talker
ros2 run cpp_lifecycle lifecycle_listenerros2 run cpp_lifecycle lifecycle_service_client
//启动了lifecycle_service_client后才开始触发输出,并在切换到activate状态之后才会发布话题信息
稳定状态:
unconfigured #未配置
inactive #未激活
active #已激活
shutdown #已关闭
中间状态:
configuring #正在配置
activating #正在激活
deactivating #正在停用
cleaningup #正在清除
shuttingdown #正在关闭
可使用的转换是:
configure #配置
activate #激活
deactivate #停用
cleanup #清除
shutdown #关闭
#设置为配置
ros2 lifecycle set /lc_talker configure
#设置为激活
ros2 lifecycle set /lc_talker activate
----------------------------OVER------------------------
本文来自互联网用户投稿,文章观点仅代表作者本人,不代表本站立场,不承担相关法律责任。如若转载,请注明出处。 如若内容造成侵权/违法违规/事实不符,请点击【内容举报】进行投诉反馈!